- + The pilot: GPSS-Plus*
GPSS-Plus: Motor de Simulación por Eventos Discretos y Sistemas Continuos
GPSS-Plus es un motor de simulación por eventos discretos y sistemas continuos orientado a modelar y analizar el comportamiento de sistemas reales a lo largo del tiempo. Su propósito no es programar aplicaciones, sino describir cómo funciona un sistema y observar su evolución bajo distintas condiciones.
En esencia, opera como un laboratorio digital donde fluye un conjunto de entidades (clientes, productos, vehículos, señales o paquetes de datos) a través de una red de procesos y recursos con capacidades y demoras definidas.
El objetivo es transformar una descripción real del sistema en un modelo ejecutable: desde una línea de producción industrial o una cadena logística, hasta el tráfico de datos en una red o un protocolo de emergencia. Al simular miles de escenarios en minutos, permite realizar previsiones, optimizar decisiones y diseñar protocolos de contingencia dentro de un entorno de simulación generalista.
Existen diferentes enfoques para abordar el modelado de sistemas tanto por su interfaz como por su objetivo.
Basados en Drag & Drop discretos y/o continuos:
- DES: Se construye conectando bloques gráficos.
- Modelado continuo: Sistemas de ecuaciones diferenciales.
- Híbridos gráficos + scripting: Combinan DES con código externo.
Discretos basados en lenguajes propios o generalistas:
- Con DSL propio: Íntegramente en un lenguaje textual como GPSS clásico.
- Sobre lenguajes generalistas: Mediante librerías de simulación.
Gracias a la herencia de los conceptos clave de GPSS clásico, GPSS-Plus se sitúa en ambos mundos, utilizando un lenguaje propio para definir el modelo, y se apoya en la potencia de un lenguaje generalista cuando el dominio lo requiere.
El objetivo último es que todo pueda comprenderse:
GENERATE 5 ADVANCE 10 {From:"Madrid", To:"Paris"} TERMINATELas principales innovaciones introducidas son:
1. La sintaxis: compatibilidad extendida
El cambio más significativo está en el manejo de los parámetros de los bloques y comandos. En GPSS clásico, los parámetros A, B, C... ofrecían una sintaxis fija y limitada.
Ejemplo clásico:
ADVANCE 30,10 ; Espera entre 30 y 40 tiempos
En GPSS-Plus, se mantiene esa estructura, pero se extiende con un formato JSON-like, que permite especificar más detalles sin romper la simplicidad:
ADVANCE 30,10 {From:"Madrid", To:"Paris"}Esto hace posible integrar parámetros gráficos, de comportamiento, o lógicos, sin inventar nuevas variantes sintácticas para cada caso.
2. Visualización gráfica
GPSS-Plus representa visualmente las entidades y los bloques mediante elementos gráficos simples: “bolitas” que se desplazan por un canvas siguiendo exactamente el flujo del modelo. Esta representación permite observar el sistema en tiempo real, comprender su dinámica de forma inmediata y facilitar la detección de cuellos de botella o comportamientos inesperados durante la ejecución.
Esta visualización, inexistente en GPSS clásico, introduce una nueva forma de interactuar con el modelo, donde la observación directa se convierte en una herramienta clave de validación y comprensión.3. Entidades virtuales (VE)
Las entidades virtuales son la ayuda para describir lo invisible del modelo. Para quien venga de otros paradigmas, recogen lo que antes se describía fuera en otro lenguaje. Para quien se inicia, simplemente son otra entidad más.
En GPSS-Plus, todo lo que ocurre en el sistema se desarrolla en el tiempo y puede observarse mientras sucede. Para que eso sea posible todos los comportamientos se tratan de la misma forma: Como entidades que se mueven, abstractas, visibles o un simple volumen.
Las entidades virtuales no se visualizan, pero son entidades completas que ejecutan lógica interna o eventos del sistema. Nacen para describir ese comportamiento con
ON_ENTER, unTIMERoTIMEOUT, y viven en el propio modelo.Según su ciclo de vida, existen tres tipos principales:
-
Reactores, que atienden eventos concretos y desaparecen.
-
Agentes, que no mueren y gestionan el universo del modelo.
-
Componentes, entidades vivas que existen como parte de otra entidad y mueren con ella.
Con este enfoque, el modelo se convierte en un ecosistema de ejecuciones concurrentes. Una entidad puede esperar un autobús mientras atiende una llamada; un agente puede controlar el tráfico; el sol puede salir y ponerse sin que ninguna entidad principal tenga que ocuparse de ello.
Se observa que muchos conceptos habituales de la Programación Procedural o la Orientada a Objetos se reinterpretan: el comportamiento no se encapsula en objetos jerárquicos, sino que se modela explícitamente como entidades que coexisten y actúan en paralelo dentro del sistema.
No hay this, ni parent, ni child: todos son brothers. Las funciones dejan de ser llamadas puntuales y pasan a convertirse en procedimientos vivos. No existe “this.respirar()” que siempre respira igual, sino una persona que camina y, al mismo tiempo, respira un aire diferente.
4. Auditoría del modelo y V&V.
Al describirse íntegramente como un modelo explícito, GPSS-Plus permite que su comportamiento pueda ser analizado, interpretado y contrastado de forma automática. Una inteligencia artificial o auditor externo puede reconstruir qué hace el sistema, detectar incoherencias internas y contrastar la intención del modelador con la ejecución real del modelo.
Esta capacidad introduce una evolución natural de los procesos clásicos de verificación y validación (V&V), que dejan de basarse únicamente en revisión manual y análisis estadístico. Se incorpora así la coherencia entre historia (H), modelo (M) y ejecución (E) sentando las bases de un nuevo enfoque de validación.
5. Variables estructuradas
En GPSS-Plus, las variables (
SAVEVALUE,ASSIGN) pueden contener números, strings, arrays u objetos.
Esto permite trabajar con estructuras de datos complejas directamente en el modelo, sin recurrir a lenguajes externos ni perder legibilidad. Por ejemplo:ASSIGN DATOS, {tipo:"Estudiante", Nombre:"Antonio", Edad: 22, Calificaciones: [8,5.8,6,8]}6. Sistema híbrido discreto - continuo
El modelado continuo en GPSS-Plus se apoya en una idea simple: dividir el tiempo en pequeños fotogramas. Al ejecutar estos pasos de forma sucesiva dentro de la cola de eventos, el comportamiento continuo emerge de manera natural.
INTEGRATE,DYNAMIC,SOLVEson las herramientas básicas que permiten definir estructuras de sistema continuo integrada en el mismo corazón de lo discreto. RK4, matrices Jacobianas y Newton Raphson permiten simular fluidos, voltajes o velocidades con el mismo DSL.7. Sandbox, gemelos digitales y edge software
Los modelos de simulación pueden perseguir tres objetivos principales:
- Sandbox, orientado a la simulación acotada y a la obtención de resultados, con o sin precarga de datos históricos.
- Gemelo digital, donde el modelo acompaña a un sistema real para su verificación, control u operación predictiva.
- Edge software, en el que el modelo constituye el propio sistema, ejecutándose de forma permanente como lógica operativa.
En los dos últimos casos, el modelo debe interactuar con el entorno externo. GPSS-Plus permite este acoplamiento mediante el BRIDGER, que actúa como un canal bidireccional genérico entre el modelo y sistemas físicos reales.
Desde el punto de vista del lenguaje, el acceso a recursos externos es uniforme: una base de datos, un fichero o un sensor se manejan con la misma sintaxis. Abrir un relé o almacenar un dato se expresa medianteBRIDGE_WRITE, y sustituir unGENERATEque simula la entrada de un paquete por una suscripción a un sensor real de movimiento es prácticamente inmediato. La transición entre sandbox a gemelo digital o edge software resulta así transparente.Gracias a la Rehidratación, el modelo no solo se conecta al mundo real, sino que se sincroniza con su estado en curso, permitiendo que el simulador 'despierte' en mitad de un proceso sin perder la continuidad operativa tras el último dato almacenado incluso tras la modificación del modelo.
8. Modelos cinemáticos
Emerge de forma natural modelar el movimiento cinemático en base a su causalidad. Lo que antes era un problema a resolver en motores específicos de dominio se traduce en la visualización directa del algoritmo DES en perfectas cajas de cristal.
Los algoritmos clásicos conveyor, road traffic y railway se convierten en las primitivas por su clasificación causal: recurso, entidad o contrato.
El conocido "secreto a voces" de los algoritmos O(1) deja de permanecer oculto tras implementaciones especializadas y pasa a observarse directamente en el propio modelo DES.
Otras extensiones destacadas:
Además de estas innovaciones, GPSS-Plus incorpora múltiples extensiones que amplían su expresividad, modularidad y potencia:
-
Nuevos recursos: bloques nuevos como
STOCK,RESTROOM,CONDITIONS, máquinas de estados finitos que amplían la paleta clásica (STORAGE,FACILITY...).
-
Creación dinámica de recursos: Lo que en motores Drag&Drop exigiría arrastrar cientos de bloques manualmente, en GPSS-Plus se logra con un simple bucle
FOREACHy unNEWFACILITY. Esta es la diferencia clave entre un lenguaje textual y las interfaces gráficas clásicas.
- Estadísticas: permite recolectar estadísticas automáticas sobre cualquier recurso o secuencia, y visualizarlas gráficamente.
-
Behavior functions: a partir de datos reales o simulados, crea interpolaciones automáticas que encapsulan comportamientos complejos (por ejemplo, distintos tramos de una carretera o máquina).
-
Funciones nativas: herramientas como
CONCAT,MERGE,PUSHextienden el lenguaje sin depender de código externo. -
Gráficas automáticas: basta con tabular datos para generar gráficos dentro del entorno de simulación.
-
Contextos (
CX$): cada modelo puede definir contextos independientes, ideales para crear librerías, módulos o componentes reutilizables. -
Depuración total: el sistema permite el seguimiento detallado de la cola de eventos, de cada entidad, recurso o variable, facilitando el análisis y la corrección de modelos.
- + Season 1: Hola mundo
Para entender GPSS ó GPSS-Plus y cualquier motor de simulación, primero debemos entender qué significa un sistema de eventos discretos (DES).
Un Sistema de Eventos Discretos (DES) modela procesos complejos basándose en la idea de que la actividad del sistema es una secuencia de eventos discretos.
¿Y qué es un evento discreto? Un evento discreto es una acción o cambio que ocurre en un momento determinado y finaliza en otro:- Evento 1: Coger un coche
- Evento 2: Conducir 2 horas
- Evento 3: Aparcar.
El sistema completo se representa como la combinación de estos eventos puntuales que, al ejecutarse en el tiempo, simulan un proceso de la vida real.
Motores de simulación como GPSS y GPSS-Plus son las herramientas clave para este análisis. Su función es modelar y analizar cómo los recursos (máquinas, estaciones de trabajo, ventanillas, o vehículos) son gestionados en conjunción con las entidades (clientes, productos) y sus respectivas colas de espera.
Este enfoque genera informes y estadísticas que, entre muchas:
-
Identifican cuellos de botella y minimizan tiempos de espera.
-
Optimizan el uso de los recursos de manera eficiente.
-
Estudian y protocolizan acciones y contingencias ante cualquier eventualidad o fallo en el sistema.
- + Un ejemplo simple
Simularemos un sistema básico donde las entidades (clientes) llegan a un recurso (ventanilla), esperan si está ocupada, son atendidas y luego se retiran. En este modelo:
- Llegadas: Los clientes llegan cada 60 a 70 tiempos.
- Atención: El tiempo de servicio en la ventanilla es de 60 a 90 tiempos.
- Colas: Si la ventanilla está ocupada, los clientes esperan.
- Salida: Los clientes tardan 10 tiempos en colocarse en la cola y otros 10 en retirarse después del servicio.
Para los que conozcan GPSS clásico tendríamos:
GENERATE 60,10 ; Entidades generadas cada 60 a 70 unidades de tiempo. ADVANCE 10 ; Tarda 10 tiempos en colocarse en la cola de la ventanilla. SEIZE VENTANILLA ; La entidad llega a la cola de la ventanilla. ADVANCE 60,30 ; Tiempo de atención: 60 a 90 tiempos. RELEASE VENTANILLA ; Abandona la ventanilla. ADVANCE 10 ; Tarda 10 segundos en irse. TERMINATE 1 ; La entidad finaliza. START 100 ; Ejecuta esta acción hasta que 100 entidades hayan sido atendidas.
En GPSS-Plus, es muy similar, pero con representación gráfica. Para ello, configuramos recursos y parámetros adicionales:
FACILITY {NAME:VENTANILLA, X:300, Y:300} ; Definimos la ventanilla en el espacio. POSITION {NAME:SALIDA, X:500, Y:300} ; Definimos la salida en el espacio. GENERATE 60,10 {NAME:GEN1, X:100, Y:300} ; Posicionamos el generador de entidades. ADVANCE 10 {TO:VENTANILLA} ; Avanza hasta la ventanilla. SEIZE VENTANILLA ; Asignación del recurso "VENTANILLA". ADVANCE 60,30 ; Tiempo de atención: 60 a 90 tiempos. RELEASE VENTANILLA ; Liberación del recurso. ADVANCE 10 {TO:SALIDA} ; Avanza hasta la salida. TERMINATE 1 ; La entidad finaliza. START 100 ; Ejecuta esta acción hasta que 100 entidades hayan sido atendidas.Paso final: Pulsa Play y observa el resultado. La primera entidad saldrá del "Generate" entre los momentos 60 y 70.
Como se puede observar, el programa no ha cambiado demasiado para añadir la parte gráfica. Básicamente, hemos definido la situación espacial de los elementos.
- + Sintaxis: Los comandos y los bloques
En una simulación, hay dos elementos principales en juego:
1. Las ENTIDADES o transacciones son los elementos que que cambian su estado con la simulación, pueden representar personas, cajas o cualquier elemento. En GPSS-Plus se representan con bolitas de colores. Estas entidades interactúan con el entorno. Por ejemplo, entran en juego a través del bloque
GENERATE, avanzan por un circuito conADVANCEy mueren en unTERMINATE.2. Los RECURSOS, que conforman el entorno y son utilizados por las entidades, como una ventanilla de atención o una caja más grande que la que represente una entidad.
Por ejemplo, una persona (entidad) se acerca a una ventanilla (recurso). Esta ventanilla tendrá un COMANDO que la define, y una serie de BLOQUES que describen qué hace la persona en relación con la ventanilla.
Un ejemplo de definición de un recurso como ventanilla es el COMANDO:
FACILITY {name:Ventanilla1, x:100, y:100}Un ejemplo de instrucción para que una entidad ocupe esa ventanilla es el BLOQUE:
SEIZE Ventanilla1
En resumen, nos basamos en dos elementos principales: bloques y comandos.
1. Bloques ligados a las entidades
Los bloques son instrucciones que las ENTIDADES ejecutan directamente durante la simulación. Cada bloque define una acción específica que afecta al flujo o estado de esa entidad.
Sintaxis general:
BLOQUE [PARÁMETROS A,B,C..] {OPCIONES JSON-LIKE}Ejemplos de bloque:
ASSIGN nombreVariable,10 TERMINATE 1
Los parámetros se denominan por letras (A, B, C, ...). Dependiendo del bloque, también pueden incluir parámetros en formato JSON-like, que usualmente definen aspectos gráficos o avanzados.
Ejemplo:MOD {COLOR:#FF0000} ; pone de color rojo una entidad.Otro ejemplo:
ADVANCE 10,5 {TO:Ventanilla1} ; la entidad avanza en tiempo hacia "Ventanilla1"2. Comandos ligados a los recursos y entorno del motor
Los comandos configuran el entorno de la simulación. A diferencia de los bloques, no son ejecutados directamente por las entidades. En cambio, definen recursos, posiciones gráficas y reglas del sistema.
Sintaxis general:
COMANDO {NAME:theName, OPCIONES JSON-LIKE}
Ejemplo para definir un almacén:
STORAGE {NAME:ALMACEN1, CAPACITY:10, X:270, Y:200}Este formato permite agregar información adicional como la posición (X, Y).
- + Variables: Savevalues y Assigns
En GPSS-Plus, las variables permiten almacenar información que puede ser utilizada por las entidades o para configurar elementos del entorno. Estas variables se dividen principalmente en dos tipos:
1. SAVEVALUE (variables globales):Las variables globales son accesibles por cualquier entidad y se mantienen durante toda la simulación. Son útiles para almacenar datos compartidos, como contadores, acumuladores o estados globales.
Sintaxis:
SAVEVALUE variable, valorEjemplo:
SAVEVALUE TiempoEspera, 8
Este comando establece la variable global "TiempoEspera" con un valor de 8.
Una vez definido, el valor puede actualizarse en cualquier momento:
SAVEVALUE TiempoEspera, 10
El valor de "TiempoEspera" ahora es 10.
Para recuperar el valor de una variable global se utilizan los SNA que tienen un formato particular:
X$nombreSavevalue ó X$(nombreSavevalue); X$TiempoEspera ó X$(TiempoEspera) IF (X$TiempoEspera>10) ...
Por ejemplo, incrementar el valor de un savevalue se puede hacer mediante:
SAVEVALUE TiempoEspera, X$TiempoEspera + 1
O a través del método:
SAVEVALUE.inc TiempoEspera
Particularmente, y debido a que estas variables son usadas por más de una entidad, tiene un COMANDO asociado para su creación e inicialización llamado
INITIAL.Su sintaxix es simple:
INITIAL TiempoEspera,10
Recuerda que
INITIALes un comando. Se usa al comienzo del programa para inicializar.2. ASSIGN (variables locales de la entidad):
Las variables locales pertenecen a una entidad específica. Cada entidad puede tener su propio valor para una misma variable, lo que las hace útiles para gestionar datos exclusivos de cada entidad.Sintaxis:
ASSIGN variable, valorEjemplo:
ASSIGN Identificador, 1
Este bloque asigna el valor 1 a la variable "Identificador" de la entidad actual que invoca el ASSIGN.
Para recuperar el valor de una variable local con su SNA de formato:
P$nombreAssign ó P$(nombreAssign); P$Identificador ó P$(Identificador) if(P$Identificador>5) ...
P$Identificador es la forma que permite obtener el valor de una variable local de la entidad.
Diferencias clave entre SAVEVALUE y ASSIGN:
- Alcance: Las variables SAVEVALUE son globales, mientras que las ASSIGN son locales a la entidad.
- Persistencia: Las SAVEVALUE mantienen su valor en todo momento, incluso si ninguna entidad las usa. Las ASSIGN solo existen mientras la entidad está activa.
- Uso: Utiliza SAVEVALUE para datos compartidos, y ASSIGN para datos específicos de una entidad.
Ejemplo combinado:
En este ejemplo, combinamos SAVEVALUE y ASSIGN para calcular el tiempo promedio de espera en una ventanilla. Si el tiempo está definido por un ADVANCE 15,10 significa que estarán entre 15 y 25 tiempos. Eso debería ir aproximando el promedio a 20.
INITIAL TiempoTotal, 0 INITIAL NumEntidades, 0 Facility {NAME:Ventanilla,X:354,Y:204} Graphic {NAME:Text1,Type:TEXT,X:358,Y:321,Text:"Promedio"} Position {NAME:Salida,X:577,Y:201} START 50 ;--------------------------------- Generate 20,0 {NAME:GEN1,X:100,Y:207} ADVANCE 10 {to:Ventanilla} SEIZE Ventanilla ASSIGN TiempoInicio, AC1$ ADVANCE 15,10 ASSIGN TiempoFinal, AC1$ RELEASE Ventanilla ADVANCE 15 {to:Salida} ASSIGN TiempoEntidad, (P$TiempoFinal - P$TiempoInicio) SAVEVALUE NumEntidades, X$NumEntidades + 1 SAVEVALUE TiempoTotal, X$TiempoTotal + P$TiempoEntidad SAVEVALUE promedio, round(X$TiempoTotal / X$NumEntidades,3) MOVE {NAME:Text1,text:"Promedio: X$promedio"} TERMINATE 1En este código:
- Cada entidad calcula su tiempo de espera en la ventanilla.
- Los tiempos se acumulan en la variable global "TiempoTotal".
- El número de entidades atendidas se cuenta en "NumEntidades".
- Al final de la simulación, puedes calcular el tiempo promedio de espera:
TiempoPromedio = X$TiempoTotal / X$NumEntidadesDe esta manera,
SAVEVALUEyASSIGNtrabajan juntos para ofrecer un manejo eficiente de datos en la simulación.Más adelante veremos como ambos BLOQUES admiten mucho más que variables numerales.
- + Estructura: IF, CALL, PROCEDURE
En este ejemplo, simulamos un sistema donde cada entidad elige aleatoriamente una de tres ventanillas para ser atendida. Cada ventanilla tiene su propia cola, y el flujo se distribuye de forma desigual en función del tiempo de servicio.
La lógica de decisión se resuelve exclusivamente mediante procedimientos estructurados.
FACILITY {NAME:VENTANILLA1,X:320,Y:450} FACILITY {NAME:VENTANILLA2,X:320,Y:300} FACILITY {NAME:VENTANILLA3,X:320,Y:150} POSITION {NAME:POS1,X:160,Y:300} POSITION {NAME:POS2,X:497,Y:300} START 30 ; Se ejecutará hasta que se completen 30 entidades GENERATE 10,0 {NAME:GEN1,X:60,Y:300} ADVANCE 20,0 {TO:POS1} ASSIGN ALEATORIO,RANDOM IF (P$ALEATORIO<0.3) CALL CAMINO1 ELSE IF (P$ALEATORIO<0.6) CALL CAMINO2 ELSE CALL CAMINO3 ENDIF ENDIF ADVANCE 20 {TO:POS2} TERMINATE 1 ;--------------------------------------------- PROCEDURE CAMINO1 ADVANCE 20 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE 25,10 RELEASE VENTANILLA1 ENDPROCEDURE PROCEDURE CAMINO2 ADVANCE 20 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE 10,2 RELEASE VENTANILLA2 ENDPROCEDURE PROCEDURE CAMINO3 ADVANCE 20 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE 10,2 RELEASE VENTANILLA3 ENDPROCEDURECon respecto al anterior sólo tenemos unos pocos BLOQUES nuevos:
ASSIGN ALEATORIO,RANDOM
Este bloque crea una variable local en la entidad (llamada
ALEATORIO) y le asigna un número aleatorio entre 0 y 1, usando la funciónRANDOM.
Estas variables locales también se llaman parámetros y se accede a ellas con la notación SNAP$Nombre
P$ALEATORIO- "P" porque es un parámetro,
- "$" es el separador estandar
- "ALEATORIO" es su nombre
IF (P$ALEATORIO<0.3)
Este es un bloque de estructura de control "IF".
Como se puede ver, es un "if" igual al de cualquier otro lenguaje. Comparamos una variable con un número.Y este otro bloque de estructura de control no requiere tampoco muchas presentaciones.
Llama a un "PROCEDURE".CALL CAMINO1
Por últimoPROCEDURE CAMINO1 ... ENDPROCEDURE 100 ; produciría un assign en la entidad invocadora llamado CAMINO1 de valor 100
Que tampoco requieren mucha presentación. Encapsulan un conjunto de acciones (
PROCEDURE).ENDPROCEDUREPuede tener de un valor en el parámetro A que será retornado del mismo modo que si hubieramos generado una instrucciónASSIGN. Recuperable como P$NombredelProcedure (P.E. P$CAMINO1). En este caso, no se utiliza. - + Recursos: Storage
Uno de los recursos clásicos es el
STORAGE.FACILITYrepresenta cosas como una ventanilla, una máquina o un operario: solo puede atender a una entidad a la vez y según su capacidad (con CAPACITY:3 la FACILITY atendería 3 entidades). STORAGE, en cambio, representa algo como un almacén, un tanque, o una red que puede usarse parcialmente.¿Qué es un
STORAGE? UnSTORAGEes un tipo de recurso que no se ocupa por entidad, sino por cantidad. Se usa cuando una entidad debe reservar parte de un recurso sin ocuparlo por completo. Por ejemplo, un camión puede dejar 10 cajas en un almacén que admite hasta 40.¿Cómo funciona? Se define con una capacidad total, por ejemplo 40 unidades.
STORAGE {NAME:almacen1, X:300, Y:200, capacity:40}Las entidades usan el bloque
ENTERpara ocupar cierta cantidad, yLEAVEpara devolverla.ENTER almacen1,5 LEAVE almacen1
Si una entidad quiere ocupar más de lo que hay disponible, esperará automáticamente en una cola interna hasta que el
STORAGEtenga suficiente capacidad libre. No necesitas programar nada adicional para gestionar esa espera.
En el ejemplo: Almacén de cajas definido (STORAGE) con 40 unidades de capacidad. Los camiones llegan cada 10 unidades de tiempo y depositan entre 1 y 16 cajas. Después de un tiempo, se retiran liberando el espacio ocupado. Verás en el texto de pantalla cuántas cajas hay almacenadas en cada momento.
Además de realizarse el cálculo a través de sumas y restas, se puede hacer directamente consultando el SNA correspondiente a la ocupación delSTORAGE:R$(almacen1,OCCUPIED) ; Unidades actualmente ocupadas R$(almacen1,LEFT) ; Unidades disponibles
Example:
/* Almacenes: STORAGE Gestión de capacidad y uso de un almacén. */ INITIAL capacidad,40 ; define un savevalue llamado capacidad de valor 40 STORAGE {NAME:almacen1, X:300, Y:200, capacity:X$capacidad} POSITION {NAME:SALIDA, X:500, Y:200} ; Texto que muestra el contenido actual GRAPHIC {NAME:texto1, Type:TEXT, X:320, Y:240, Text:"Cajas actuales: 0"} START 100 ; Camiones llegando cada 10 unidades de tiempo GENERATE 10,0 {NAME:Camion, X:100, Y:200} ADVANCE 15 {TO:almacen1} ENTER almacen1,(random*15)+1 ; Ocupa entre 1 y 16 unidades del storage savevalue uso,X$capacidad - R$(almacen1,LEFT) MOVE {name:texto1,text:"Cajas actuales X$uso : R$(almacen1,OCCUPIED)"} ADVANCE 40,10 LEAVE almacen1 ; Libera las unidades ocupadas savevalue uso,X$capacidad - R$(almacen1,LEFT) MOVE {name:texto1,text:"Cajas actuales X$uso : R$(almacen1,OCCUPIED)"} ADVANCE 15 {TO:SALIDA} TERMINATE 1 - + La cola de eventos: el motor de la simulación
La cola de eventos:
En el corazón de cualquier simulación de eventos discretos se encuentra la cola de eventos, una estructura que define cómo y cuándo se ejecutan las acciones de las entidades en el modelo. Este enfoque de eventos discretos es lo que lo distingue de otros lenguajes de programación.
Hay que pensar que es como si cada entidad tuviese su propia programación, como se haría en C o Python, pero saltando entre entidades según el orden temporal que marca esta cola. Si simulamos 10 entidades, hay 10 programas corriendo “a la vez” (o casi).
¿Qué es la cola de eventos?
Es una lista ordenada de acciones programadas, cada una asociada a un instante de tiempo simulado (AC1). La cola garantiza que las acciones se ejecuten en el orden correcto según el tiempo en que deben ocurrir.
Lo más importante: está ordenada por tiempo. Por ejemplo:
Tiempo 15 - Atender a la entidad 14 en el paso 88 Tiempo 45 - Atender a la entidad 22 en el paso 16 Tiempo 77 - Atender a la entidad 16 en el paso 25
Ejemplo: Evolución de la cola de eventos
Supongamos el caso clásico de un banco donde los clientes entran por la puerta y son atendidos en una ventanilla. Las entidades son generadas con
GENERATEy pasan un tiempo siendo atendidas medianteADVANCE.Imaginemos que estamos en el instante
T = 5, con la siguiente cola:T 5: Entidad 5: Esperando en la cola de la ventanilla T 7: Generate: Generar elemento, cliente que va a entrar por la puerta T 8: Entidad 9: Dirigiéndose a la cola de la ventanilla T 16: Entidad 3: Dirigiéndose a la cola de la ventanilla
Ahora mismo, tenemos una entidad, la 5, que es la siguiente en la cola. Extraeremos ese elemento de la cola para procesarlo. ¡Ahora sabemos que el tiempo es 5! No porque el tiempo haya pasado, sino porque nuestra siguiente tarea está programada para T=5.
Vamos a pensar que, por ejemplo, la Entidad 5 se encuentra en el "paso" (posición de su programación) que indica un ADVANCE 10 para ser atendida.
Ante esto, la solución es colocarse en la cola en T=15 (5+10) y cesar en su ejecución mientras es atendida.
Ahora la cola de eventos tendrá esta situación:T 7: Generate: Generar elemento T 8: Entidad 9: Dirigiendose a la cola de la ventanilla T 15: Entidad 5: Ir a la salida T 16: Entidad 3: Dirigiendose a la cola de la ventanilla
Ya estamos en el evento siguiente. Toca actualizar el tiempo del sistema de nuevo: "AC1" que ahora toma el valor 7. Como decíamos, no es que el tiempo haya pasado, es que la cola de eventos hace saltar el tiempo porque no tiene nada que hacer hasta T=7.
Extraemos el elemento de la cola y nos encontramos con un GENERATE 20,5. Por lo tanto, debemos calcular qué tiempo será ese definido por 20,5; algo entre 20 y 25. Supongamos el resultado de 22. Es decir, entrará otra persona dentro de 22 tiempos. La cola pasa ahora a tener este otro aspecto después de moverse el GENERATE y realizar 2 tareas:
1.- En propio GENERATE avanza 20 (parámetro A) (7+20=27).
2.- Crear una nueva entidad (la número 10) para que pueda llevar a cabo sus tareas en 22 momentos después (7+22=29).T 8: Entidad 9: Dirigiendose a la cola de la ventanilla T 15: Entidad 5: Ir a la salida T 16: Entidad 3: Dirigiendose a la cola de la ventanilla T 27: Generate: Generar elemento T 29: Entidad 10: Dirigiendose a la cola de la ventanilla
Ahora sería el momento de volver a mover el tiempo del sistema y atender el siguiente elemento: la Entidad 9.
Así seguirá viva la cola de eventos hasta que se cumpla alguna de las opciones que finalicen el programa.
Esta cola de eventos en GPSS-Plus tiene, además, otras características para poder realizar las tareas en el mundo gráfico y añadir los eventos tipo "ON_*".
En esta cola GPSS-Plus, tenemos 5 tipos de elementos:- GENERATE – Introducen nuevas entidades en el sistema.
- Entidades – Las que se mueven por el modelo y consumen recursos.
- Tiempos muertos – Pausas visibles que permiten simular paso a paso o ajustar la velocidad.
- Entidades virtuales – No visibles, ejecutan eventos como ON_ENTER, ON_TIMER, etc.
- TIMER del sistema – Como un generate, pero genera entidades virtuales a intervalos fijos.
Las colas de los recursos:
Otras colas existentes son las de los recursos que cada uno de ellos puede tener una o dos según el caso.
Estas listas están ordenadas por orden de llegada y su gestión depende exclusivamente del propio recurso.
Por ejemplo, una
facilitytiene dos listas, la de entidades ocupantes y la de entidades en cola.Cuando una entidad intenta hacer
SEIZE, si el recurso está ocupado, pasará a la lista de espera. Si no hay entidades en el recurso, lo ocupará ingresando en la lista de ocupantes.
Cuando realizeRELEASE, abandonará esta lista y forzará al recurso a buscar alguna entidad en su cola pendiente de entrar. Si hay alguna, la incorporará a la lista de ocupantes y planificará su entrada en la cola de eventos en ese mismo momento, por lo que esa entidad tomará el control del motor en cuanto la saliente cese su actividad.Conclusión
La cola de eventos no solo define el orden y el tiempo en que ocurren las acciones, sino que también actúa como el núcleo del sistema. Garantiza que los bloques se ejecuten correctamente y que la simulación sea consistente y precisa. Comprender este concepto es esencial para diseñar modelos eficientes y aprovechar al máximo las capacidades de GPSS-Plus.
En GPSS-Plus es sencillo ver esta cola, sólo debes activar la ventana de menú y pulsar sobre el botón "Event Queue".
- + Conditions: Esperar una condición.
Imagina un grupo de personas esperando a que se abra una puerta automática. No están haciendo cola ni ocupando nada, simplemente están esperando que ocurra algo.
Eso es lo que permite el recursoCONDITIONS: detener entidades hasta que una condición lógica se cumpla.Algo parecido existía en GPSS clásico con el bloque
ASSEMBLEpara este propósito. En GPSS-Plus, este comportamiento se sustituye por este recurso más general y flexible.El recurso
CONDITIONSpermite retener entidades hasta que se cumpla una condición. Esta condición se define como una expresión evaluada cada vez que una entidad intenta pasar.CONDITIONS {NAME:Conditions1,X:208,Y:317,expression:(X$contador>=5)}CONDITIONStiene más opciones que se verán más adelante.
Su bloque asociadoWAITUNTILse encarga de validar para esta entidad la condición, en este caso, si el contador es mayor o igual a 5.Llegada la 5ª entidad, la condición se cumplirá y seguirá adelante sin ser retenida. Ahora solo falta liberar al resto chequeando a todas las retenidas con otro bloque asociado:
WAITCHECK.Resulta interesante observar que salen todas juntas del
CONDITIONSen el primer tramo. En el segundo, la aleatoriedad del ADVANCE 20,40 hace que se separen.También empezamos a utilizar el BLOQUE
ENDGENERATEmás acorde con el método estructurado queTERMINATE. Son equivalentes pero sintácticamente es más adecuado estructurar el bloque conGENERATE/ENDGENERATE. Permite identificar claramente qué bloque fue generado, especialmente si hay múltiplesGENERATEen el programa.
Example:
/* Sincronización: CONDITIONS / WAITUNTIL Las entidades esperan en grupo y avanzan juntas. */ POSITION {NAME:POS1,X:208,Y:222} POSITION {NAME:POS2,X:452,Y:215} POSITION {NAME:POS3,X:752,Y:215} CONDITIONS {NAME:Conditions1,X:208,Y:317,expression:(X$contador>=5)} ; Recurso retenedor INITIAL contador,0 START 100 ;***************************************************** GENERATE 10,2 {NAME:GEN1,X:86,Y:228,ERADIO:10,ECOLOR:#FF9900} ADVANCE 16,0 {TO:POS1} savevalue contador,X$contador + 1 WAITUNTIL Conditions1 WAITCHECK Conditions1 savevalue contador,0 ADVANCE 20,0 {TO:POS2} ; Avanzan hacia la segunda posición TODOS JUNTOS ADVANCE 20,40 {TO:POS3} ; Avanzan hacia la tercera posición con un tiempo aleatorio entre 20 y 40 pero esta vez SEPARÁNDOSE ENDGENERATE 1 ; Finaliza la vida de la entidad ES IDENTICO A TERMINATE 1 - + Segundo paso de estructura
Ahora que ya sabes usar procedimientos y decisiones condicionales simples (
IF), vamos a ver un caso donde una entidad elige entre varias rutas posibles.Para eso, usamos la estructura
SWITCH, muy parecida a un “menú de decisiones”.¿Qué hace este ejemplo?
- Genera una entidad cada 10 unidades de tiempo.
- Le asigna un número aleatorio (
P$ALEATORIO). - Según ese número, elige una de cuatro rutas (
CALL CAMINO1, ...,CALL CAMINO4). - En dos de esas rutas (CAMINO3 y CAMINO4), se activa un bloque visual que muestra "Lock" o "Unlock", y se bloquean o desbloquean recursos. Si una entidad entra en el camino 3 se bloqueará el uso de los recursos 1, 2 y 3 aunque las que estén dentro podrán finalizar su tarea. Cuando una entidad tome el camino 4, volverán a usar los recursos sin dilación. El bloqueo no expulsa a las entidades que ya están usando los recursos, pero impide que nuevas los tomen hasta que sean desbloqueados.
Además definimos cierto aspecto puramente visual, "el flow".
Activándolo en losADVANCEveremos una línea de ruta que comenzará siendo vertical u horizontal según elLAYOUT, podrá pasar por un ciertoVIAyVIA2, además de poder converger o divergir segúnMERGEoDECISION.
Example:
/* Bloques: SWITCH y LOCK/UNLOCK Enrutamiento condicional y gestión de recursos bloqueables. */ FACILITY {NAME:VENTANILLA1,X:320,Y:450,capacity:3} FACILITY {NAME:VENTANILLA2,X:320,Y:300,capacity:3} FACILITY {NAME:VENTANILLA3,X:320,Y:150} FACILITY {NAME:VENTANILLA4,X:320,Y:50} POSITION {NAME:POS1,X:158,Y:301} POSITION {NAME:POS2,X:497,Y:300} POSITION {NAME:POS3,X:627,Y:300,TYPE:TERMINATE,TITLE:END} Graphic {NAME:Text1,Type:TEXT,X:320,Y:104,Text:"Unlock"} START 30 GENERATE 10,0 {NAME:GEN1,X:57,Y:300} ADVANCE 20,0 {TO:POS1,flow:1} ASSIGN ALEATORIO,(RANDOM) SWITCH P$ALEATORIO CASE <,0.4 CALL CAMINO1 ENDCASE CASE <,0.8 CALL CAMINO2 ENDCASE CASE <,0.92 CALL CAMINO3 MOVE {NAME:Text1,text:"Lock"} LOCK VENTANILLA1 LOCK VENTANILLA2 LOCK VENTANILLA3 ENDCASE DEFAULT CALL CAMINO4 MOVE {NAME:Text1,text:"Unlock"} UNLOCK VENTANILLA1 UNLOCK VENTANILLA2 UNLOCK VENTANILLA3 ENDCASE ENDSWITCH ADVANCE 20,10 {TO:POS2,flow:1,MERGE:"salida"} ADVANCE 20,0 {TO:POS3,flow:1} ENDGENERATE 1 ;**************************************** PROCEDURE CAMINO1 ADVANCE 20 {TO:VENTANILLA1,flow:1,DECISION:"inicio"} SEIZE VENTANILLA1 ADVANCE 45,10 RELEASE VENTANILLA1 ENDPROCEDURE PROCEDURE CAMINO2 ADVANCE 20 {TO:VENTANILLA2,flow:1,DECISION:"inicio"} SEIZE VENTANILLA2 ADVANCE 40,10 RELEASE VENTANILLA2 ENDPROCEDURE PROCEDURE CAMINO3 ADVANCE 20 {TO:VENTANILLA3,flow:1,DECISION:"inicio"} SEIZE VENTANILLA3 ADVANCE 40,20 RELEASE VENTANILLA3 ENDPROCEDURE PROCEDURE CAMINO4 ADVANCE 20 {TO:VENTANILLA4,flow:1,DECISION:"inicio"} SEIZE VENTANILLA4 ADVANCE 10,2 RELEASE VENTANILLA4 ENDPROCEDURE ;*************************************************************** - + Un modelo completo
Ahora que ya conoces los fundamentos de GPSS-Plus, veamos cómo se integran todos en un ejemplo unificado.
Vamos a ver un código bastante más largo de lo que hemos visto hasta ahora, casi 100 líneas de código.
Este modelo representa un sistema con vehículos de distintos tipos que recorren una zona de trabajo durante varios ciclos. Cada uno decide su ruta, ejecuta tareas, y finaliza tras completar un número de ciclos entrando en el aparcamiento de utilitarios o de camiones según el caso ocupando la
facilityo elstoragedependiendo del tamaño del camión.Este código tiene varias novedades:
Lo primero que observamos es que hay a nivel general una estructura con dos
GENERATESvariosPROCEDURES.Los generates se separan visualmente para que cada uno tenga su propia actividad y marcan las entidades nacidas de ellos de forma diferenciada.
GENERATE ... NAME:G_UTILITARIOSG_UTILITARIOS ; genera los utilitarios .... assign ... .... CALL PROC.MAIN ENDGENERATE 1
Y después tenemos la serie de
PROCEDURES:Procedures de proceso:
PROC.MAIN ; Proceso principal PROC.UTILITARIOS PROC.CAMIONES
Procedures de decisión:
DECIDE.RUTA DECIDE.LOOP_OR_END
PROC.MAIN:
Toda la lógica principal estará concentrada en el proceso PROC.MAIN que normalmente estará formado por un bucle
whileque encerrará las entidades mientras no cumplan la condición de finalizar todas sus tareas.WHILE ("P$estado"!="EXIT") ... ... ASSIGN estado,???? ENDWHILEDentro de éste se situará la decisión sobre las rutas principales que pude tomar cada entidad que suele ser un
SWITCHde opciones o variosIFs anidados. Todas estas decisiones conviene colocarlas enPROCEDUREScon el nombre:DECIDE.*de forma que sea sencillo reconocerlos y saber de antemano que lo normal es que retornen, directamente el nombre delPROCEDUREa ser invocado por la entidad:ENDPROCEDURE "P$VALUE" ; Retornará 'PROC.UTILITARIOS' ó 'PROC.CAMIONES'
Es decir: CALL DECIDE.AAA devolverá en P$AAA (lo anterior al punto se obvia) el valor: 'PROC.BBB' que podrá usarse directamente como CALL P$AAA.
CALL DECIDE.RUTA ; Ejecuta lógica de decisión CALL "P$(RUTA)" ; Llama al procedimiento retornado por la decisión
Muy parecido a la decisión de salir o continuar dando vueltas al ciclo.
Otros elementos nuevos son:
ADVANCE0 {TO:POS_ENTRADA,flow:1,layout:H}Que en este caso es un
ADVANCE0y noADVANCEpuesto que no queremos más que dar un salto visual sin que la entidad pierda tiempo entrando y saliendo de la cola de eventos.
Y la última novedad es el uso de otro recurso que tiene una utilidad de agrupamiento y estadística:QUEUERTiene capacidad ilimitada y con él se peude saber de forma sencilla cuántas y cuáles son las entidades que están en una determinada zona.
QUEUE EN_APARCAMIENTO ; entran ... ... DEPART EN_APARCAMIENTO ; salen
Resumidamente se puede observar en el ejemplo:
- Cómo usar varios
GENERATEcon lógica diferenciada (camiones y utilitarios). - Cómo las entidades pueden decidir rutas dinámicamente (
SWITCH,CALL,PROCEDURE). - Cómo se usa un bucle interno por entidad (
WHILE) para simular iteración. - Cómo visualizar el flujo con posiciones, subtítulos y estilos.
- Cómo combinar distintos recursos (
FACILITY,STORAGE,QUEUE). - Cómo trabajar con nombres dinámicos de procedimientos (
P$(RUTA)).
Example:
QUEUER {NAME:EN_APARCAMIENTO,X:413,Y:497} FACILITY {NAME:UTILITARIOS, capacity:4,X:413,Y:390} STORAGE {name: CAMIONES , capacity:5, X:412,Y:120} POSITION {NAME:POS_ENTRADA,X:240,Y:270} POSITION {NAME:POS_SALIDA,X:557,Y:316,type:decision,title:"FIN?"} POSITION {NAME:POS_LOOP,X:225,Y:549} POSITION {NAME:FIN,X:730,Y:324,type:terminate} START 20 ;************************************************************************ GENERATE 20,10,0,10 {NAME:G_UTILITARIOS,X:80,Y:363,ESUBTITLE:"P$ciclos/3"} assign TIPO_VEHICULO,1 mod {RADIO:5,color:#000066} call PROC.MAIN ENDGENERATE 1 ; ALIAS DE TERMINATE ;---------------------------- GENERATE 20,10,0,10 {NAME:G_CAMIONES,X:80,Y:199,ESUBTITLE:"P$ciclos/3"} ASSIGN TIPO_VEHICULO,floor(RANDOM * 2 + 2) mod {RADIO:10,color:#006600} call PROC.MAIN ENDGENERATE 1 ; ALIAS DE TERMINATE ;************************************************************************ PROCEDURE PROC.MAIN ASSIGN ciclos,1 ADVANCE0 {TO:POS_ENTRADA,flow:1,layout:H} ASSIGN estado, "loop" WHILE ("P$estado"!="EXIT") QUEUE EN_APARCAMIENTO CALL DECIDE.RUTA ; return assign:RUTA CALL "P$(RUTA)" ADVANCE 20,18 {TO:POS_SALIDA,flow:1,MERGE:"salida"} DEPART EN_APARCAMIENTO CALL DECIDE.LOOP_OR_END ASSIGN estado,"P$(LOOP_OR_END)" ENDWHILE ADVANCE 20,0 {TO:FIN,flow:1} ENDPROCEDURE ;***************************************************** PROCEDURE DECIDE.RUTA ASSIGN VALUE,"" SWITCH P$TIPO_VEHICULO CASE <=,1 ASSIGN VALUE,"PROC.UTILITARIOS" ENDCASE DEFAULT ASSIGN VALUE,"PROC.CAMIONES" ENDCASE ENDSWITCH ENDPROCEDURE "P$VALUE" ;--------------------------------------------- PROCEDURE DECIDE.LOOP_OR_END assign value,"loop" assign ciclos,P$ciclos + 1 if (P$ciclos > 3) assign value,"EXIT" mod {SUBTITLE:"-EXIT-"} else advance 30 {to:POS_ENTRADA,flow:1,via:POS_LOOP,layout:V} endif ENDPROCEDURE "P$value" ;--------------------------------------------- PROCEDURE PROC.UTILITARIOS ADVANCE 20 {TO:UTILITARIOS,flow:1,DECISION:"recurso"} SEIZE UTILITARIOS ADVANCE 55,40 RELEASE UTILITARIOS ENDPROCEDURE PROCEDURE PROC.CAMIONES ADVANCE 20 {TO:CAMIONES,flow:1,DECISION:"recurso" } ENTER CAMIONES ,P$TIPO_VEHICULO ADVANCE 40,20 LEAVE CAMIONES ENDPROCEDURE ;---------------------------------- - Cómo usar varios
- + Season 2: Entidades virtuales (VE)
- + Entidades y entidades virtuales VE
Ya hemos visto sobradamente qué es una entidad: Una bolita que se mueve por la pantalla. Sabemos que nace de un
GENERATE, que recorre bloques, avanza por posiciones y puede entrar en recursos.¿Y qué es una entidad virtual? Pues una entidad que no se mueve por la pantalla.
Parece muy simple la diferencia pero es básicamente esa aunque conlleva muchas implicaciones. Imagina una bolita invisible que no ocupa espacio pero sí ejecuta instrucciones.
Vamos a definirlas formalmente:
- Las entidades virtuales no nacen de un GENERATE. En su lugar nacen de los COMANDOS:
TIMER,PRE_RUN,TRIGGER(ON_ENTER,ON_QUEUE,ON_*...) O del BLOQUE:TIMEOUT - Su número identificativo (D$N) no es secuencial positivo (1,2,... n) sino justo del revés: (-1, -2,... -n)
- Su
TERMINATEno resta sucesos. De hecho, veremos que se usaTERMINATE_VEque solo termina con las virtuales. - No tienen representación visual directa pero pueden interactuar como cualquiera con la parte gráfica.
¿Y para qué sirven?
Pues tienen infinidad de utilidades.
Aunque no lo parezca, son el motivo por el que GPSS-Plus no utiliza lenguajes secundarios para programar elementos complementarios como pueda ser el Python o JAVA.
Se programan en GPSS-Plus como cualquier subprograma. Se encargan de todas las tareas accesorias a los ciclos de vida de las entidades, por ejemplo, si queremos montar un reloj, tiene poco sentido que sea el nacimiento o movimiento de las entidades que seguro que tienen un montón de cosas de las que preocuparse entrando y saliendo de recursos.
En su lugar, unTIMERque se lanzará automáticamente cada N instantes puede hacer estas tareas.
Si queremos tener un cierto control de múltiples recursos y el estado de sus colas, podemos tener una entidad virtual que cada vez que alguna entidad ingrese en una cola haga de controlador.Las entidades virtuales trabajan entre bastidores. No se ven moverse, pero sin ellas, muchos procesos simplemente no ocurrirían.
En el ejemplo:
Una entidad normal, la número 1
(D$N==1), crea una entidad virtual que nacerá dentro de 30 instantes para ejecutar un procedure:timeout actualizarContador,30
No recorre posiciones del flujo ni usa recursos. Solo aparece tras ser reclamada por una entidad y, desde entonces, la entidad virtual llama a una nueva entidad virtual cada 3 instantes.
Su única tarea: contar.
La primera llama a la segunda, que llama a la tercera.... todo a través de un BLOQUETIMEOUTque sólo requiere el nombre del procedimiento a ejecutar por la entidad virtual y el tiempo en el que ocurrirá.
Se puede observar cómo el texto cambia aunque no hay entidades visibles que lo actualicen. Eso es porque lo hace una entidad virtual, que trabaja en segundo plano, como un pequeño proceso autónomo.Este ejemplo demuestra cómo una VE puede actuar como proceso recurrente sin necesidad de ninguna intervención humana ni entidad física. A partir de ahora, verás que muchas de las decisiones del sistema, alarmas o estadísticas estarán gestionadas por este tipo de entidades invisibles.
Example:
/* Entidades Virtuales: Procesos invisibles que operan en segundo plano. La primera entidad creará con un retraso de 30 momentos una VE. Esta VE creará su siguiente cada 3 momentos. Solo son visibles las entidades, no las VE. */ POSITION {NAME:POS1,X:321,Y:332} POSITION {NAME:POS2,X:517,Y:326} Graphic {NAME:Text1,Type:TEXT,X:366,Y:454,Text:"Contador: 0"} INITIAL contador,0 START 200 ;***************************************************** GENERATE 20,0 {NAME:GEN1,x:101,y:332} ADVANCE 10 {TO:POS1} ; Lanzamos una entidad virtual que actualizará el contador if (D$N==1) timeout actualizarContador,30 endif ADVANCE 10 {TO:POS2} ENDGENERATE 1 ;***************************************************** PROCEDURE actualizarContador SAVEVALUE contador, X$contador + 1 MOVE {name:Text1, text:"Soy la Entidad Virtual D$N. Contador: X$contador"} TIMEOUT actualizarContador, 3 TERMINATE_VE ENDPROCEDURE - Las entidades virtuales no nacen de un GENERATE. En su lugar nacen de los COMANDOS:
- + Creación de las VE
Ya hemos visto qué es una entidad virtual: una entidad que no se ve moverse por la pantalla pero que ejecuta instrucciones y participa del motor de simulación.
Ahora veremos cómo nacen estas entidades virtuales y quién puede crearlas.¿Quién crea una VE?
Las VE no nacen de un
GENERATE, como las entidades normales. En su lugar, pueden ser creadas por cuatro mecanismos distintos:-
El sistema, usando:
-
PRE_RUN– al comienzo de la simulación, una sola vez. -
TIMER– en intervalos fijos definidos porINTERVAL.
-
-
Una entidad, usando:
-
TIMEOUT– programa la ejecución de una VE para dentro de X instantes.
-
-
Un recurso, usando eventos
ON_*como:-
ON_SEIZE,ON_RELEASE,ON_LEAVE, etc.
-
¿Qué tienen en común?
Todas las VEs ejecutan un
PROCEDURE, que puede venir indicado comoTRIGGERo como nombre de procedimiento.
EsePROCEDUREes el "código" que ejecuta la VE. Debe terminar con unTERMINATEoTERMINATE_VE, igual que cualquier entidad normal.Sobre los parámetros
Cuando usamos
NEW,TIMEOUToCALL, podemos pasar parámetros adicionales.
Estos estarán disponibles dentro del procedimiento comoP$PARAM_A,P$PARAM_B, etc., igual que ya hemos visto conCALL.Esto permite que una VE "sepa" quién la ha llamado o por qué.
En el ejemplo:
-
PRE_RUNcrea una entidad al inicio (color magenta). -
TIMER1crea una cada 53 unidades (color azul). -
TIMEOUTse lanza justo antes de entrar al recurso y deja un mensaje. -
ON_RELEASEse dispara al liberar laFACILITY1.
Cada vez que una de estas VEs se crea, aparece un texto en pantalla con su identificador y lo que está haciendo.
Example:
/* Creación de las VE */ SYSTEM {TYPE:ON_TIMER, TRIGGER:TIMER1, INTERVAL: 53} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} POSITION {NAME:POS1,X:311,Y:497} POSITION {NAME:POS2,X:571,Y:147,type:terminate,title:END} Facility {NAME:Facility1,X:573,Y:483,ON_RELEASE:on_RELEASE_Facility1} Graphic {NAME:Text_Pre_run,Type:TEXT,X:253,Y:196} Graphic {NAME:Text_TIMER1,Type:TEXT,X:253,Y:158} Graphic {NAME:Text_Timeout1,Type:TEXT,X:254,Y:252} Graphic {NAME:Text_on_release,Type:TEXT,X:575,Y:544} START 40 GENERATE 30,0 {NAME:GEN1,X:110,Y:510, ECOLOR:#FF3333, ERADIO:8} if ("P$PARAM_A"=="PRE_RUN") MOD {COLOR:magenta,subtitle:pre_run} ENDIF if ("P$PARAM_A"=="TIMER1") MOD {COLOR:blue,subtitle:timer1} ENDIF ADVANCE 30,2 {TO:POS1,flow:1} ADVANCE 30,2 {TO:Facility1,flow:1} TIMEOUT Timeout1,0,D$N ; le pasamos como parámetro el número de entidad. seize Facility1 advance 30,30 release Facility1 ADVANCE 30,2 {TO:POS2,flow:1} ENDGENERATE 1 ;****************************************** PROCEDURE PRE_RUN MOVE {name:Text_Pre_run,Text:"Soy [D$N] PRE_RUN Creo una nueva entidad."} NEW GEN1,0,"pre_run" TERMINATE_VE ENDPROCEDURE ;--------------------------------- PROCEDURE TIMER1 MOVE {name:Text_TIMER1,Text:"Soy [D$N] Timer1. Creo una nueva entidad."} NEW GEN1,0,"timer1" ; Generate, tiempo, PARAM_A, PARAM_B... TERMINATE_VE ENDPROCEDURE ;--------------------------------- PROCEDURE Timeout1 MOVE {name:Text_Timeout1,Text:"Soy [D$N] Timeout1. La entidad [P$PARAM_A] va a entrar"} TERMINATE_VE ENDPROCEDURE PROCEDURE on_RELEASE_Facility1 MOVE {name:Text_on_release,Text:"Soy [D$N] on_RELEASE. La entidad [P$ENTITYNUMBER] abandona la Facility1"} TERMINATE_VE ENDPROCEDURE ;****************************************** -
- + Las VE permanentes, los agentes
Un tipo especial de entidad virtual es aquella que no muere al final de su procedimiento.
Estas VE que permanecen activas durante toda la simulación (o parte de ella) las llamamos agentes.- Son como procesos en segundo plano que nunca terminan.
- Se lanzan normalmente desde
PRE_RUNmediante unTIMEOUT. - Guardan su número de entidad (D$N) en un
SAVEVALUE, para poder interactuar o consultar su estado.
Más adelante veremos que estos agentes se encargan de tareas de control, monitorización o coordinación entre recursos.
En resumen, un agente es una VE que no hace TERMINATE y permanece viva en bucle.
Eso le permite estar atento, esperando, o vigilando el entorno.
Example:
/* Agentes: Entidades Virtuales Permanentes Monitorización de recursos con un bucle infinito. */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} POSITION {NAME:POS1,X:311,Y:497} POSITION {NAME:POS2,X:571,Y:147,type:terminate,title:END} Facility {NAME:Facility1,X:573,Y:483} Graphic {NAME:Text_agente,Type:TEXT,X:229,Y:305} START 40 GENERATE 30,0 {NAME:GEN1,X:110,Y:510, ECOLOR:#FF3333, ERADIO:8} ADVANCE 30,2 {TO:POS1,flow:1} ADVANCE 30,2 {TO:Facility1,flow:1} seize Facility1 advance 30,30 release Facility1 ADVANCE 30,2 {TO:POS2,flow:1} ENDGENERATE 1 ;****************************************** PROCEDURE PRE_RUN TIMEOUT AGENTE.INIT,0 TERMINATE_VE ENDPROCEDURE ;--------------------------------- PROCEDURE AGENTE.INIT savevalue nAgente,D$N WHILE (1==1) MOVE {name:Text_agente,Text:"Soy el agente [D$N]. Tiempo AC1$ Entidades en Facility1: R$(Facility1,IN) Entidades en cola: R$(Facility1,QUEUE)"} ADVANCE 10 ENDWHILE TERMINATE_VE ENDPROCEDURE - + Entidades componente
Además de las entidades normales y de los agentes, el modelo admite un tercer tipo de entidad: las entidades componente.
Una entidad componente es una entidad que existe para ejecutar una función en nombre de otra entidad. No es un objeto físico ni un recurso externo, sino una parte activa de su comportamiento: algo que la entidad “hace” de manera continua o paralela.Este concepto permite modelar situaciones muy naturales:
un buzo que respira y consume oxígeno mientras avanza, un vehículo cuyas ruedas se desgastan mientras circula, o una persona que lee una noticia y cambia de decisión mientras espera en la cola del autobús.Más adelante veremos cómo se crean y cómo trabajan junto a la entidad principal, pero por ahora basta con entender que permiten que una entidad no sea un único hilo secuencial, sino un pequeño sistema formado por varias entidades colaborando entre sí.
- + Entidades y entidades virtuales VE
- + Season 3: DSL (Domain-Specific Language)
- + Filosofía del DSL
Filosofía del DSL de GPSS-Plus
El DSL de GPSS-Plus no está pensado como un lenguaje de programación general, ni como una notación alternativa para dibujar bloques. Está diseñado como el lenguaje operativo del motor de simulación.
Cuando se trabaja con el DSL, el usuario no “programa”: define comportamientos, recursos y eventos que el motor ejecuta en el tiempo: MODELA.
Para entenderlo correctamente, conviene pensar el DSL como un conjunto de herramientas organizadas en cuatro niveles.
1. Entidades visibles o físicas: comportamiento de las “bolitas”
El primer nivel del DSL está orientado a definir qué hacen las entidades que recorren el modelo.
Estas entidades:
-
nacen (GENERATE),
-
avanzan en el tiempo (ADVANCE),
-
interactúan con recursos (SEIZE, ENTER, REST…),
-
toman decisiones (IF, SWITCH),
-
y finalmente mueren (TERMINATE).
Todo su comportamiento se describe paso a paso, pero ese paso a paso no es secuencial real: es ejecución sobre una cola de eventos.
El DSL proporciona aquí:
-
bloques de flujo,
-
control temporal,
-
estructuras condicionales y bucles,
-
llamadas a procedimientos.
Este es el nivel más visible del modelo y el más cercano a la intuición del usuario.
2. Entidades virtuales (VE): comportamiento paralelo
No todo comportamiento pertenece a una “bolita”.
GPSS-Plus introduce entidades virtuales (VE) para modelar lógica que:
-
no tiene representación gráfica,
-
no recorre el circuito,
-
pero vive dentro del motor de simulación.
Las VE permiten:
-
reaccionar a eventos (ON_SEIZE, ON_RELEASE, SIGNAL),
-
ejecutar lógica periódica (TIMEOUT),
-
actuar como agentes, controladores, incluso como comonentes,
-
coordinar otras entidades sin bloquearlas.
Desde el punto de vista del DSL, una VE es una entidad completa, con ciclo de vida propio, pero orientada al control del sistema o entidades.
3. Recursos: el entorno con el que interactúan las entidades
El tercer nivel del DSL define el entorno del modelo.
Los recursos representan aquello que las entidades usan, ocupan, esperan o consultan. Pueden ser:
-
físicos: FACILITY, STORAGE, RESTROOM, STOCK
-
lógicos: QUEUER, CONDITIONS, FSM
-
externos: BRIDGER, FILE, TABLE, PLOTTER
Cada recurso sigue el mismo patrón conceptual:
-
se define mediante un COMANDO,
-
se usa mediante BLOQUES emparejados,
-
se observa mediante SNAs.
El DSL no oculta el estado de los recursos: todo puede ser leído, consultado y usado en decisiones.
4. El motor: tiempo, eventos y sistema
Por debajo de entidades y recursos existe un cuarto nivel, menos visible pero fundamental: el motor de simulación.
El DSL permite interactuar con él de forma explícita:
-
controlando el tiempo simulado,
-
programando eventos futuros (TIMEOUT),
-
configurando el sistema (SYSTEM),
-
accediendo a la cola de eventos y al estado interno mediante SNAs.
Esto permite modelos donde:
-
el comportamiento no es solo “flujo”,
-
sino reacción, sincronización y planificación
Example:
/* Season 3: DSL Ejemplo de modelo simple con el DSL de GPSS-Plus. */ FACILITY {NAME:VENTANILLA, X:300, Y:300} ; Definimos la ventanilla en el espacio. POSITION {NAME:SALIDA, X:500, Y:300} ; Definimos la salida en el espacio. START 100 ; Ejecuta esta acción hasta que 100 entidades hayan sido atendidas ;------------------------------------------------------------------------------------ GENERATE 60,10 {NAME:GEN1, X:100, Y:300} ; Posicionamos el generador de entidades. ADVANCE 10 {TO:VENTANILLA} ; Avanza hasta la ventanilla. SEIZE VENTANILLA ; Asignación del recurso "VENTANILLA". ADVANCE 60,30 ; Tiempo de atención: 60 a 90 segundos. RELEASE VENTANILLA ; Liberación del recurso. ADVANCE 10 {TO:SALIDA} ; Avanza hasta la salida. TERMINATE 1 ; La entidad finaliza. -
- + Objetos y arrays en ASSIGN y SAVEVALUE
En cuanto al lenjuage, la evolución de GPSS clásico a GPSS-Plus tiene dos grandes puntos de inflexión:
- La introducción de los STACKS, que permiten bucles, llamadas anidadas y estructuras de control complejas.
- La ampliación del sistema de variables
SAVEVALUEyASSIGN, que ahora no solo almacenan números, sino también cadenas, arrays y objetos y permiten ejecutar funciones sobre ellos.
Este segundo avance convierte en obsoletos elementos antiguos como
MATRIXy permite que GPSS-Plus incorpore funciones nativas de cualquier lenguaje moderno comopush,concat,mergeosplit, todo dentro de la propia lógica del simulador y sin recurrir a programación externa. Lo que antes se resolvía con herramientas rígidas, ahora puede hacerse de forma expresiva, estructurada y mantenible. GPSS-Plus deja de ser un lenguaje de tarjetas con números y pasa a ser un DSL de propósito completo, orientado a flujos de eventos y manipulación estructurada de datos.Ya sabemos que GPSS-Plus permite declarar variables con dos niveles de ámbito:
- ASSIGN: variable local a la entidad.
- SAVEVALUE: variable global, compartida entre entidades.
Su funcionamiento es idéntico salvo por su visibilidad. En ambos casos, las variables pueden contener diferentes tipos de datos:
- Números: su escritura es la habitual: 123.4
- Cadenas: siempre entre comillas dobles: "Un texto"
- Arrays: su notación es entre corchetes y sus elementos separados por comas: [10,20,"un texto","otro texto",30]
- Objetos: su declaración es entre llaves y dentro de ellos con pares clave:valor: {clave1:"Un texto",clave2:123.4,clave3:[10,20,30]}
Nótese que no existe booleano, que se usará 0 para falso y 1 para verdadero. Ejemplos:
ASSIGN miNumero, 10 ASSIGN miTexto, "hola" ASSIGN miLista, [10, 20, 30] ASSIGN miObjeto, {clave1: 20, clave2: "hola"} ASSIGN mixto, [10, {clave: "dato"}, 30]Acceso mediante rutas en sus SNA
Los SNA asociados a estas variables sonP$(paraASSIGN) yX$(paraSAVEVALUE). Pero dado que las variables ahora pueden ser algo más que números, los SNA serán más versátiles para poder acceder a cualquier parte de la variable. Su acceso será guiado por la ruta de claves separadas por puntos tanto para arrays como para objetos:ASSIGN notas, [8,4,5] ASSIGN media, (P$(notas.0) +P$(notas.1) +P$(notas.2))/3
ASSIGN notas, {notaExamen1:8,notaExamen2:4,notaExamen3:5} ASSIGN media, (P$(notas.notaExamen1) +P$(notas.notaExamen2) +P$(notas.notaExamen3))/3Y todo esto puede hacerse tan complejo como sea necesario introduciendo los SNA en cualquier parte de la notación para construir la ruta adecuada:
ASSIGN numero_0,0 ASSIGN numero_1,1 ASSIGN numero_2,2 ASSIGN notas, {notaExamen_0:8,notaExamen_1:4,notaExamen_2:5} ASSIGN media, (P$(notas.notaExamen_P$numero_0) + P$(notas.notaExamen_P$numero_1) + P$(notas.notaExamen_P$numero_2)) / 3O el acceso a un array dentro de un objeto o un objeto dentro de un array siguiendo el mismo proceder:
ASSIGN grupo, [{nombre: "Luis"}, {nombre: "Marta"}] ASSIGN nombrePrimero, P$(grupo.0.nombre)Existe una única palabra reservada para estas rutas:
LENGTHASSIGN longitud, P$(unArray.LENGTH)
Modificación parcial mediante rutas
También puede modificarse una parte de una estructura accediendo a ella directamente:ASSIGN unArray.0, {clave1: "texto1"}convirtiendo el primer elemento del array en un objeto
SNA de acceso sin evaluación:
V$
Mientras queP$yX$evalúan los contenidos para ser mostrados,V$devuelve el contenido bruto (número, cadena, objeto o array) sin tratamiento alguno. Esto es necesario para transmitir un array o un objeto completo a través de un parámetro o hacer copias perfectas.;realizar una copia: ASSIGN alumnos,[{nombre:"Ana",edad:20},{nombre:"Alberto",edad:22},{nombre:"Antonio",edad:19}] ASSIGN copiaAlumnos, V$(alumnos) ;obtener un elemento concreto ASSIGN elemento, V$(unArray.1) ; o pasarlo como parámetro CALL irAClase, V$(unArray.1)Es importante diferenciar
P$unTextodeV$unTexto.assign miNombre:"Antonio" move {name:text1,text:"Mi nombre es P$miNombre"} ; se muestra 'Mi nombre es Antonio' move {name:text1,text:"Mi nombre es V$miNombre"} ; se muestra 'Mi nombre es "Antonio"'Esta diferencia viene, precisamente, de que
V$es la obtención del dato bruto, que incluye la declaración del tipo de dato que es, en este caso, un string.
V$no debe usarse dentro de cadenas directamente. Se reserva para contextos donde se espera un valor estructurado.Como última nota, la característica de nulo es se trata con el operador "?" de tal forma que se puede asignar un valor si antes no ha sido asignado con:
ASSIGN max_value,P$max_value ? P$max_value : 100
Example:
/* Variables Estructuradas: Arrays y Objetos Declaración, acceso y modificación de datos complejos. */ POSITION {NAME:POS1,X:300,Y:100} initial posY,400 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 100} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 120} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text9,Type:TEXT,X:324,Y:X$posY - 160} START 1 ;***************************************************************** GENERATE 1,0,0,1 {NAME:GEN1,X:100,Y:100} ; --- Declaraciones de todos los tipos --- ASSIGN miNumero, 10 * 2 ASSIGN miTexto, "Resultado" ASSIGN miArray, [10, 20, 30] ASSIGN miObjeto, {clave1: 222, clave2: 333} ASSIGN miArrayDeObjetos, [10, {clave1: 555, clave2: (111 * 6)}, 30] ; --- Accesos por rutas --- ASSIGN suma, P$(miArray.0) + P$(miArray.1) ; --- Modificaciones por ruta --- ASSIGN miArray.2, 777 ASSIGN miObjeto.clave1, {profundidad: "valor interno"} ASSIGN miObjeto.clave2, V$(miArray.2) ; --- Copias por valor bruto (estructuras completas) --- ASSIGN copiaObjeto, V$(miObjeto) ASSIGN elementoCopiado, V$(miArrayDeObjetos.1) ; --- Evaluación de longitud --- ASSIGN tamArray, P$(miArrayDeObjetos.LENGTH) ; --- Visualización --- move {name:Text1, text: "miNumero = P$miNumero"} move {name:Text2, text: "miTexto = P$miTexto"} move {name:Text3, text: "miArray.2 = P$(miArray.2)"} move {name:Text4, text: "miObjeto.clave1.profundidad = P$(miObjeto.clave1.profundidad)"} move {name:Text5, text: "miObjeto.clave2 (copiado) = P$(miObjeto.clave2)"} move {name:Text6, text: "miArrayDeObjetos.1.clave2 = P$(miArrayDeObjetos.1.clave2)"} move {name:Text7, text: "copiaObjeto.clave2 = P$(copiaObjeto.clave2)"} move {name:Text8, text: "elementoCopiado.clave1 = P$(elementoCopiado.clave1)"} move {name:Text9, text: "Longitud array = P$tamArray"} ADVANCE 100,0 {TO:POS1} ENDGENERATE 1 - + SNA (String Numeric Accessor)
Ya sabemos que un
ASSIGNcrea una característica (variable) asociada a cada entidad virtual y que unSAVEVALUEes un valor global del sistema.
También hemos visto que se accede a ellos a través de expresiones comoP$nombreoX$nombre.
Estas expresiones se llaman SNA, String/Numeric Accessors, y son un mecanismo fundamental del lenguaje para acceder dinámicamente a cualquier valor del modelo.P$nombre— Devuelve el contenido como texto. Es útil para trazas, etiquetas gráficas, o concatenaciones.V$nombre— Devuelve el valor bruto (string, número, objeto o array), tal como fue asignado.X$nombre— Devuelve el contenido de unSAVEVALUE(valor global).
assign unaVariable,{nombre:"Antonio",edad:30} call fun, V$(unaVariable) ;envía el objeto como talAdemás, existen SNA específicos para acceder a datos del sistema:
AC1$— Tiempo actual del sistema.TG1$— Número de entidades pendientes de procesar.
Y también a propiedades de recursos:
R$(recurso, propiedad)— Devuelve el valor de la propiedad solicitada.R$(almacen1, IN)— Entradas alSTORAGE.R$(facility3, ENTRIES)— Número de usos de laFACILITY.R$(market1, QUEUE)— Longitud actual de la cola.
Los SNA no son instrucciones: son expresiones.
Se evalúan en cualquier parte donde se espere un valor. Esto los convierte en una herramienta esencial para tomar decisiones, construir mensajes, hacer cálculos o acceder a estructuras complejas.En el ejemplo, se usan dos SNA muy representativos:
AC1$el tiempo actual del sistema.R$(VENTANILLA,QUEUE): estado actual de la cola del recurso.D$N: devuelve el número identificador de la entidad virtual actual. En este caso, lo almacenamos en una variablenumeromediante unASSIGN, y luego accedemos a su valor conP$numero.
Esto muestra cómo los SNA pueden ser usados tanto para obtener datos del sistema como para manipular variables propias de cada entidad, y cómo se integran fácilmente con los comandos visuales como
move.Por último tenemos el SNA
SYS$que contiene variables básicas del sistema en un objeto como los datos de fecha y hora:ASSIGN sys, SYS$ MOVE {name: REALTIME1, text:"P$(sys.date.year)/P$(sys.date.month)/P$(sys.date.day)"} MOVE {name: REALTIME2, text:"P$(sys.date.hour):P$(sys.date.min):P$(sys.date.sec)"}Acceso directo a datos de entidades:
El SNA D$ permite consultar propiedades internas de cualquier entidad del sistema.
Su sintaxis general es:D$(propiedad) ; entidad actual D$(propiedad, numeroEntidad) ; entidad específica
Si se omite el segundo parámetro, se asume
D$N(la entidad actual).Todas estas propiedades se aplican tanto a la entidad actual como a cualquier otra entidad si se indica su número:
Propiedad Descripción N, ID Identificador de la entidad M0, M1 Parámetros M0 y M1 BLOCK Índice del bloque actual STEP Número de paso ejecutado RESOURCETIME Tiempo dentro de la FACILITY/STORAGE actual RESOURCENAME Nombre del recurso que ocupa ADVANCESTART Tiempo en que comenzó el ADVANCE actual ADVANCELAPSE Duración restante del ADVANCE X, Y, Z Coordenadas visuales T Tiempo absoluto de creación CX Contexto de la entidad De forma especial se puede verificar la existencia de una entidad dentro del mismo SNA D$:
if (D$(EXIST,1000)==1) ; la entidad 1000 está activa endif
Example:
/* SNA: Atributos del Sistema y Recursos Entidad virtual monitoriza el estado de la cola de un recurso. */ SYSTEM {TYPE:ON_TIMER, TRIGGER:Timer1, INTERVAL: 5} FACILITY {NAME:Ventanilla,X:470,Y:308} Graphic {NAME:Text1,Type:TEXT,X:471,Y:254} Graphic {NAME:Text2,Type:TEXT,X:471,Y:234} START 100 GENERATE 10,0 {name:gen1,X:115,Y:307} ADVANCE 20 {to:Ventanilla} SEIZE Ventanilla ADVANCE 20 RELEASE Ventanilla ENDGENERATE 1 ; Mostrar la cola actual cada cierto tiempo PROCEDURE Timer1 assign numero,D$N move {name:Text1,text:"Soy la entidad virtual número: P$numero"} move {name:Text2,text:"T: AC1$ Entidades en cola: R$(Ventanilla,QUEUE)"} TERMINATE ENDPROCEDURE 1 - + Funciones nativas
Las funciones nativas permiten operar directamente sobre el contenido de una variable, sea numérica, de texto, array u objeto. Algunas funciones modifican su contenido.
El formato es siempre el mismo:
ASSIGN.<FUNCION> nombreVariableDestino, parámetro [,número entidad destino]
SAVEVALUE.<FUNCION> nombreVariableDestino, parámetroSi la variable no existe, se crea.
Es muy importante decir que los objetos JSON "array" y "object" solo se pueden crear bajo estos dos bloques y el comando INITIAL. Cualquier otro COMANDO o BLOQUE que requiera parámetros como objeto o array recibirá el objeto ya creado bajo el SNA V$(variable).
CALL fun, V$(estructura) CALL fun, P$(variable)
CALL fun, {nombre_"Antonio"}; no se interpretan los objetos fuera de ASSIGN, SAVEVALUE ó INITIALCALL fun, [1,2,V$(otraLista)]; no se interpretan los objetos fuera de ASSIGN, SAVEVALUE ó INITIALFunciones:
1. Variables numéricas
.INC valor– incrementa el valor actual, uno por defecto. Modifica su contenido
Ejemplos:ASSIGN.INC contador ASSIGN.INC contador,10 ASSIGN.INC miObjeto.puntuacion
2. Variables string
.TRIM– elimina espacios al principio y al final Modifica su contenidoASSIGN.TRIM miCadena
.LENGTH– devuelve la longitud del string Devuelve el resultado en otro assignASSIGN.LENGTH miCadena, longitud
.JOIN– une los elementos en un string Devuelven un nuevo valor
ASSIGN.JOIN cadenaFinal, {DATA:["uno","dos","tres"], SEP:" - "} ASSIGN.JOIN cadenaFinal, {DATA:V$miArray, SEP:" - "}
3. Variables array
.PUSH valor– añade al final
.UNSHIFT valor
.EXTEND arrayASSIGN.PUSH miArray, 45 ; [45] ASSIGN.PUSH miArray, {edad:45} ; [45,{edad:45}] ASSIGN.UNSHIFT miArray, "inicio" ; ["inicio",45,{edad:45}] ASSIGN.EXTEND miArray, V$otroArray ; ["inicio",45,{edad:45},"otroArray_a","otroArray_b"].SPLIT– divide un string por separador y lo convierte en arrayASSIGN.SPLIT resultado, {DATA:"uno,dos,tres", SEP:","}.SLICE– tona una sección de un array entre START y END (no incluido)ASSIGN myArray [0,1,2,3,4] ASSIGN.SLICE myArray, {START:1,END:3} ; [1,2]
4. Variables objeto
.MERGE objeto– fusiona claves desde otro objeto
.DELETE rutaASSIGN.MERGE datos, V$nuevosDatos ASSIGN.DELETE datos, direccion.calle
.KEYS– obtiene una lista con los nombres de clave Devuelve el resultado en otra variableASSIGN.KEYS datos, claves
Acceso por rutas
Además de asignar un valor completo a una variable, el DSL permite asignar únicamente a una parte interna de un objeto o un array mediante rutas.
Una ruta es una secuencia de claves o índices separada por puntos:ASSIGN variable.clave , 3 ASSIGN variable.clave.subclave , 3 ASSIGN variable.3 , 3 ASSIGN variable.3.otroNivel , 3
Rutas en objetos
Las rutas en objetos no crean niveles intermedios automáticamente.
Si una ruta no existe, se genera un error y la simulación se detiene:ASSIGN miObjeto, {} ASSIGN miObjeto.clave1, 123 ; OK ASSIGN miObjeto.clave2.otroNivel, 999 ; ERROR → clave2 no existeLos objetos deben existir previamente en cada nivel de la ruta:
ASSIGN miObjeto, {clave2:{}} ; Ahora sí existe clave2 ASSIGN miObjeto.clave2.otroNivel, 999Rutas en arrays
Los arrays sí permiten acceder directamente a cualquier índice, incluso si está vacío:
ASSIGN miArray, [] ASSIGN miArray.2, 99 ; Crea MIARRAY como [ , , 99 ]
Además, es posible operar sobre una ruta interna con funciones nativas:
ASSIGN miArray.3, [] ASSIGN.PUSH miArray.3, 199
Los SNA asociados
VD$Algunos datos son de acceso directo a través del SNA asociado para, por ejemplo, validar la existencia de un elemento extraido de
.POPantes de continuarVD$(ruta)– Devuelve el valor bruto sin procesar. Similar aV$pero dentro de una expresión.VD$(ruta,LENGTH)– Longitud del contenido:- Cadenas o arrays: número de elementos.
- Objetos: número de claves.
- Números: número de dígitos.
VD$(ruta,TYPEOF)– Tipo de dato en forma de texto:"STRING","NUMBER","ARRAY","OBJECT", etc.VD$(ruta,ISEMPTY)– Devuelve"1"si el valor está vacío:- "" (cadena vacía), array vacío, objeto sin claves, número 0.
- Devuelve
"0"en cualquier otro caso.
VD$(ruta,EXIST)– Comprueba si la ruta existe completamente sin errores.- Devuelve
"1"si es válida,"0"si no lo es.
- Devuelve
VD$(ruta,HASKEY,clave)– Comprueba si un objeto tiene una determinada clave. Devuelve"1"o"0".VD$(ruta,INCLUDES,valor)– Comprueba si un array o cadena incluye un valor dado. Devuelve"1"o"0".
Example:
POSITION {NAME:POS1,X:300,Y:100} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 100} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 120} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text9,Type:TEXT,X:324,Y:X$posY - 160} Graphic {NAME:Text10,Type:TEXT,X:324,Y:X$posY - 180} Graphic {NAME:Text11,Type:TEXT,X:324,Y:X$posY - 200} Graphic {NAME:Text12,Type:TEXT,X:324,Y:X$posY - 220} Graphic {NAME:Text13,Type:TEXT,X:324,Y:X$posY - 240} Graphic {NAME:Text14,Type:TEXT,X:324,Y:X$posY - 260} START 1 GENERATE 1,0,0,1 {NAME:GEN1,X:100,Y:100} ; Variables base ASSIGN saludo, "Hola" ASSIGN complemento, "mundo" ASSIGN mensajeOriginal, " Hola Mundo GPSS+ " ASSIGN nombres, ["Ana", "Luis", "Eva"] ASSIGN otrosNombres, ["Sonia", "David"] ASSIGN textoConSeparador, "uno,dos,tres,cuatro,cinco" ; Métodos de arrays assign.push nombres, "Ricardo" ; ["Ana", "Luis", "Eva" "Ricardo"] assign.unshift nombres, "Laura" ; ["laura", "Ana", "Luis", "Eva" "Ricardo"] assign.extend nombres, V$otrosNombres ; ["laura", "Ana", "Luis", "Eva", "Ricardo","Sonia", "David"] assign.slice nombres, {START:1,END:6} ; ["Ana", "Luis", "Eva", "Ricardo","Sonia"] ; String methods assign.join mensajeFinal, {DATA:["P$saludo", " ", "P$complemento", "!"]} ; "Hola Mundo!" assign.join nombresTexto, {DATA:V$nombres,SEP:" - "} ; "Ana - Luis - Eva" assign.split palabras, {DATA:V$textoConSeparador, SEP: ","}; ["uno","dos","tres","cuatro","cinco"] assign.trim mensajeOriginal ; "Hola Mundo GPSS+" assign.LENGTH mensajeOriginal, largoMensaje ; 16 ; Objetos ASSIGN datos, {nombre:"Juan", edad:25} ASSIGN nuevosDatos, {ciudad:"Madrid", edad:30} assign.merge datos, V$nuevosDatos assign.delete datos, ciudad ; Numérico ASSIGN contador, 10 assign.inc contador,-5 assign.inc contador ; Claves ASSIGN alumnos, {ana:{edad:20}, luis:{edad:25}} assign.keys alumnos, clavesAlumnos ; Rutas de acceso ASSIGN miObjeto, {} ASSIGN miObjeto.clave1, 123 ;ASSIGN miObjeto.clave2.otroNivel, "error" -> error por no existir ASSIGN miArray, [] ASSIGN miArray.2, 99 ASSIGN miArray.3, [] ASSIGN.push miArray.3, 199 ; Mostrar resultados move {name:Text1, text:"Mensaje final: P$mensajeFinal"} move {name:Text2, text:"Nombres (2): P$(nombres.2) LENGTH: VD$(nombres,LENGTH)"} move {name:Text3, text:"Nombres texto: P$nombresTexto"} move {name:Text4, text:"Palabras[1]: P$(palabras.1)"} move {name:Text5, text:"Texto trimmed: P$mensajeOriginal"} move {name:Text6, text:"Largo mensaje: P$largoMensaje"} move {name:Text7, text:"datos.edad: P$(datos.edad)"} move {name:Text8, text:"datos.ciudad: P$(datos.ciudad)"} ; debería estar vacío move {name:Text9, text:"Contador final: P$contador"} move {name:Text10, text:"clavesAlumnos[1]: P$(clavesAlumnos.1)"} move {name:Text11, text:"Tipo de nombres: VD$(nombres,TYPEOF)"} move {name:Text12, text:"Alumnos tiene luis?: VD$(alumnos,HASKEY,luis)"} move {name:Text13, text:"miObjeto.clave1: P$(miObjeto.clave1)"} move {name:Text14, text:"miArray.3.0: P$(miArray.3.0)"} ADVANCE 100,0 {TO:POS1} ENDGENERATE 1 - + Acceso a variables de otras entidades
Acceso a variables de otras entidades
Además de trabajar con variables propias o globales, GPSS-Plus permite leer y escribir variables
ASSIGNde cualquier entidad viva del sistema.Lectura a través del SNA:
El SNA habitual
P$admite un segundo parámetro que indica el número de entidad objetivo:P$(nombreVariable, númeroEntidad)
Esto permite consultar valores internos de otra entidad sin necesidad de copiarlos a un SAVEVALUE.
move {name:text5, text:"La entidad 2 tiene: P$(unNumeroPrivado,2)"}Esto accede directamente a la variable
unNumeroPrivadoactiva en la entidad número 2.Escritura en otra entidad:
Mediante un tercer parámetro en la instrucción
ASSIGN, podemos guardar información en la entidad deseada:ASSIGN unNumero, 123, 1
Comprobación de la existencia de la entidad:
Se puede consultar la existencia con el SNA específico:
if (D$(EXIST,1000)==1)
Example:
/* Acceso cruzado entre entidades usando P$ y ASSIGN destino */ POSITION {NAME:POS_MOD, X:286, Y:244} POSITION {NAME:POS_END, X:741, Y:233, type:terminate} Graphic {NAME:T1, type:TEXT, X:455, Y:300} Graphic {NAME:T2, type:TEXT, X:455, Y:188} START 60 ; habrá 6 entidades (3 de cada tipo) /* --- ENTIDAD TIPO A --- */ GENERATE 30,0,15 {NAME:GA, X:100, Y:70, ECOLOR:#ff3333, subtitle:"A"} ASSIGN miValor, 100 mod {subtitle:"Mi valor P$miValor"} ADVANCE 20 {to:POS_MOD} ; Si existe la entidad B (2, 4, 6...) IF (D$(EXIST, D$N+1)==1) ASSIGN nEntidadDestino,D$N+1 ASSIGN miValor, P$(miValor)+10, P$nEntidadDestino ; A incrementa el valor de B MOVE {name:T1, text:"Cambio el valor de P$nEntidadDestino a: [P$(miValor,P$nEntidadDestino)]"} ENDIF ADVANCE 50 {to:POS_END} ENDGENERATE 3 /* --- ENTIDAD TIPO B --- */ GENERATE 30,0 {NAME:GB, X:103, Y:407, ECOLOR:#3366ff, subtitle:"B"} ASSIGN miValor, 200 mod {subtitle:"Mi valor P$miValor"} ADVANCE 20 {to:POS_MOD} ; Si existe la entidad A (1, 3, 5...) IF (D$(EXIST, D$N-1)==1) ASSIGN nEntidadDestino,D$N-1 ASSIGN miValor, P$(miValor)-5, P$nEntidadDestino ; B reduce el valor de A MOVE {name:T2, text:"Cambio el valor de P$nEntidadDestino a: [P$(miValor,P$nEntidadDestino)]"} ENDIF ADVANCE 50 {to:POS_END} ENDGENERATE 3 - + Estructuras de control
Las estructuras de control permiten a las entidades tomar decisiones, repetir bloques de código o recorrer colecciones. GPSS-Plus incorpora estas estructuras con una sintaxis simple y adaptada al paradigma declarativo del lenguaje.
1.
IF/ELSE/ENDIFPermite evaluar una condición y ejecutar bloques alternativos según el resultado.
IF (P$edad > 18 || "P$nombre"=="Eva") move {name:text1,text:"Mayor de edad o es Eva"} ELSE move {name:text1,text:"Menor de edad o no es Eva"} ENDIF- La condición debe estar entre paréntesis.
- Se pueden usar operadores lógicos (
&&,||) y comparaciones (==,!=,>,<,>=,<=). - Todo se evalúa como una única expresión dentro de los paréntesis.
2.
FOREACH/ENDFOREACHASSIGN listaAlumnos,[{nombre:"Ana"},{nombre:"Luis"}] FOREACH alumno IN V$listaAlumnos move {name:text1,text:"Alumno: P$alumno.nombre"} ENDFOREACH- Permite iterar sobre los elementos de una colección (array u objeto).
- La variable que representa cada elemento debe ser un ASSIGN.
- Se puede iterar sobre arrays ([1,2,3]) o arrays de objetos ([{nombre:"Ana"}, {nombre:"Luis"}]).
- La variable usada en la iteración (por ejemplo
color,entidad,clave) debe ser unASSIGN, creado automáticamente si no existe. - El tercer parámetro de
INyIN_OBJECT(el origen de los datos) debe ser una referencia válida por su SNAV$(ruta)
Modos disponibles
- IN: Itera sobre un array.
- IN_OBJECT: Itera sobre las claves de un objeto.
- IN_RESOURCE: Itera sobre las entidades actualmente utilizando el recurso (
FACILITY,STORAGE, etc.). - IN_QUEUE: Itera sobre las entidades en la cola de un recurso (
FACILITY,STORAGE, etc.).
FOREACH color, IN, V$(persona.colores) assign resultado, "P$color" ENDFOREACH FOREACH clave, IN_OBJECT, V$(persona) assign resultado, "P$clave" ENDFOREACH FOREACH entidad, IN_RESOURCE, Ventanilla assign ids, "P$entidad" ENDFOREACH FOREACH entidad, IN_QUEUE, Ventanilla assign ids, "P$entidad" ENDFOREACH
3.REPEAT/UNTILASSIGN intento, 0 REPEAT ASSIGN.INC intento move {name:text1,text:"Intento número: P$intento"} UNTIL (P$intento >= 3)- Repite un bloque hasta que una condición se cumpla.
- Se ejecuta al menos una vez.
- La condición entre paréntesis se evalúa tras cada repetición.
- El bloque entre REPEAT y UNTIL puede contener cualquier otra instrucción GPSS-Plus, incluso estructuras anidadas.
4.
SWITCH/CASE/ENDCASE/ENDSWITCHSWITCH P$color CASE ==,"rojo" move {name:text1,text:"Color ROJO"} CASE ==,"azul" move {name:text1,text:"Color AZUL"} CASE ==,"verde" move {name:text1,text:"Color VERDE"} ENDCASE ENDSWITCH- Permite ejecutar bloques específicos según el valor de una expresión, similar a switch-case en otros lenguajes.
- La expresión del SWITCH puede ser cualquier valor evaluable (número, texto, etc.).
- Cada CASE compara el valor con un operador (==, !=, >, <, etc.) y un segundo argumento.
- Se ejecuta solo el primer CASE que cumpla la condición.
- No hay necesidad de BREAK, ya que no continúa evaluando los siguientes casos.
- El bloque se cierra con ENDCASE.
5.
WHILE/ENDWHILEassign intentos, "" assign intento, 0 assign maximo, 5 WHILE (P$intento < P$maximo) assign.inc intento assign intentos, "P$intentos P$intento" ENDWHILE move {name:text1, text:"Intentos: P$intentos"}- Ejecuta un bloque de código mientras se cumpla una condición. A diferencia de
REPEAT, la condición se evalúa antes de cada iteración. - La condición debe ir entre paréntesis y puede usar expresiones con SNA (
P$,VD$,D$) y operadores lógicos. - Si la condición es falsa al inicio, el bloque no se ejecuta nunca.
Example:
/* Estructuras de Control: FOREACH y REPEAT Iteración sobre arrays, objetos y recursos. */ POSITION {NAME:POS1,X:651,Y:480} initial posY,400 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 160,color:#000000} Facility {NAME:Facility1,X:382,Y:483,capacity:3} START 100 GENERATE 10,0 {name:GEN1,X:110,Y:477} assign edad,2 assign nombre,"Eva" ; IF (P$nombre=="Eva") -> Expresión incorrecta, faltan las comillas IF ("P$nombre"=="Eva") move {name:Text1, text:"Expresiones correctas"} endif IF (P$edad > 18 || V$nombre=="Eva") move {name:Text1, text:"Expresiones correctas"} endif ASSIGN intentos, 0 move {name:Text1, text:"Color actual: P$valor"} ; FOREACH: recorrer todos los colores assign gustos_luis,"" ASSIGN persona, {nombre:"Luis" , gustos:["leer", "música", "viajar", "dormir"] , ciudad:"Madrid" , pais:"España" } FOREACH gusto, IN, V$(persona.gustos) assign gustos_luis,"P$gustos_luis P$gusto" ENDFOREACH move {name:Text1, text:"Gustos de Luis: P$gustos_luis"} assign claves_valores,"" FOREACH clave, IN_OBJECT, V$(persona) assign claves_valores,"P$(claves_valores) \n P$clave P$(persona.P$clave)" ENDFOREACH move {name:Text6, text:"Claves y valores de persona:\n P$(claves_valores)"} assign entidades_cola,"" FOREACH entidad, IN_QUEUE, Facility1 assign entidades_cola,"P$entidades_cola P$entidad" ENDFOREACH move {name:Text3, text:"entidades en cola: P$entidades_cola"} assign entidades_dentro,"" FOREACH entidad, IN_RESOURCE, Facility1 assign entidades_dentro,"P$entidades_dentro P$entidad" ENDFOREACH move {name:Text4, text:"entidades dentro: P$entidades_dentro"} assign intento, 0 assign maximo, 3 assign intentos,"" REPEAT assign.inc intento assign intentos,"P$intentos P$intento" UNTIL (P$intento >= P$maximo) move {name:Text5, text:"intentos: P$intentos"} advance 10,0 {to:Facility1} SEIZE Facility1 advance 20,30 RELEASE Facility1 ADVANCE 100,0 {TO:POS1} ENDGENERATE 1 - + Subprocesos y llamadas
Subprocesos y llamadas en GPSS-Plus (introducción)
GPSS-Plus incorpora un sistema completo de subprocesos que no existía en GPSS clásico, gracias a la introducción de pilas de ejecución (stacks).
Esto permite que una entidad —o incluso el propio sistema— pueda invocar procedimientos independientes y retomar la ejecución de forma controlada.Existen varios tipos de llamada, según quién invoca y quién ejecuta el procedimiento:
- CALL — Lo ejecuta la misma entidad que lo invoca.
- SIGNAL — Lo ejecuta otra entidad, pero solo cuando la actual libera el turno.
- SIGNALNOW — Lo ejecuta otra entidad inmediatamente, interrumpiendo a la actual.
- TIMEOUT — Lo ejecuta una entidad virtual (VE) en un tiempo futuro.
- ON_* — Lo ejecuta una VE al producirse un evento en un recurso (SEIZE, RELEASE, ENTER...).
- TIMER — Lo ejecuta una VE periódicamente.
- PRE_RUN — Lo ejecuta una VE al inicio de la simulación.
Todos ellos saltan a un bloque PROCEDURE, que debe finalizar con
ENDPROCEDURE.Nombres jerárquicos
Los procedimientos pueden organizarse como rutas:
agente.abrir cliente.saludar robot1.motor.arrancar
El valor devuelto se almacenará automáticamente en una variable cuyo nombre coincide con el último fragmento ("abrir", "saludar", "arrancar").
Parámetros y SNA disponibles
Dentro de un PROCEDURE pueden consultarse los parámetros recibidos:
-
P$PARAM_A— valor evaluado -
V$PARAM_A— valor bruto (array, objeto, número, string sin evaluar)
Finalización del PROCEDURE
El procedimiento puede terminar con:
- RETURN valor — Vuelve al llamador.
- RETURN_RESTORE valor — Para SIGNAL/SIGNALNOW: la entidad destino retoma exactamente donde estaba.
- RETURN_RETRY valor — Para SIGNAL/SIGNALNOW: la entidad destino repite su paso actual (típico en reintentos de recursos).
- + CALL
El comando CALL permite que la propia entidad activa salte a un procedimiento y lo ejecute inmediatamente.
Al finalizar, la entidad vuelve exactamente al paso siguiente del que llamó.Es el comportamiento más simple y directo del sistema de subprocesos.
Sintaxis:
CALL nombreProcedimiento, parámetroA, parámetroB, ...
- Los parámetros se reciben dentro del procedimiento como
P$PARAM_A,P$PARAM_B, etc. - El valor devuelto por el procedimiento se guarda automáticamente en una variable llamada como el último fragmento del nombre del PROCEDURE.
Ejemplos de nombre → variable de resultado:
CALL calcular, 10 → P$calcular CALL cliente.sumar, 20,30 → P$sumar CALL robot.motor.arrancar → P$arrancar
Finalización del PROCEDURE:
ENDPROCEDURE valor
Finaliza y devuelve el valor indicado:
ENDPROCEDURE 3 ; P$calcular = 3
RETURN valor
Hace lo mismo, pero resulta más explícito y legible:
RETURN 3 ENDPROCEDURE
Ambas formas son equivalentes cuando se usa CALL.
Acceso a los parámetros:
Dentro del procedimiento:
P$PARAM_Adevuelve el valor evaluado.V$PARAM_Adevuelve el valor bruto (arrays, objetos, strings sin evaluar).
Ejemplos:
P$(PARAM_A.nombre)si pasaste un objeto.P$(PARAM_B.2)si pasaste un array.
Example:
/* CALL */ POSITION {NAME:POS1, X:286, Y:244} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 100} START 1 GENERATE 10,0,0,1 {NAME:GA, X:100, Y:70} ASSIGN datos, {nombre:"Ana", edad:30} ASSIGN numero, 123 ASSIGN colores, ["rojo","verde"] CALL procesar, V$datos, V$numero, V$colores,30 move {name:Text1, text:"Resultado del procedimiento: P$(procesar)"} ADVANCE 10 {to:POS1} ENDGENERATE 1 ;--------------------------------------- PROCEDURE procesar move {name:Text2, text:"Nombre: P$(PARAM_A.nombre)"} move {name:Text3, text:"Edad: P$(PARAM_A.edad)"} move {name:Text4, text:"Número: P$PARAM_B"} move {name:Text5, text:"Primer color: P$(PARAM_C.0)"} move {name:Text6, text:"Dato directo: P$(PARAM_D)"} RETURN "OK" ENDPROCEDURE - Los parámetros se reciben dentro del procedimiento como
- + SIGNAL y SIGNALNOW
SIGNAL
SIGNALinvoca unPROCEDUREpara que sea ejecutado por otra entidad, pero no interrumpe a la entidad que lo llama.-
La ejecución ocurrirá en el mismo instante de tiempo (AC1).
-
Entrará al final del conjunto de eventos programados para ese mismo tiempo.
-
La entidad actual continúa normalmente, termina su ciclo y luego la entidad señalada tomará el control en el momento programado.
-
Es una llamada diferida.
En resumen: SIGNAL programa la ejecución del procedimiento, pero no interrumpe a la entidad que lo invoca.
SIGNALNOW
SIGNALNOWinvoca un PROCEDURE para que sea ejecutado de inmediato por otra entidad, interrumpiendo a la entidad actual.Puntos clave:
- La entidad invocada toma el control inmediatamente, dentro del mismo AC1.
- La entidad llamante queda suspendida, y retomará exactamente donde estaba (o repetirá la operación, según el retorno).
- La entidad señalada pasa a ser la primera en ejecutarse en ese instante.
- Es una llamada preemptiva.
Normalmente, el PROCEDURE debería finalizar con:
-
RETURN_RESTORE
Si la entidad interrumpida debe reanudar exactamente donde estaba. -
RETURN_RETRY
Si debe repetir la operación en la que estaba (típico para SEIZE, ENTER o recursos).
En resumen:
SIGNALNOWprovoca una interrupción inmediata; la entidad señalada ejecuta el procedimiento sin esperar.En el ejemplo:
Funcionamiento de
SIGNAL/SIGNALNOWcon agentes activos y dormidosCuando un procedimiento es ejecutado mediante SIGNAL o SIGNALNOW, el comportamiento final depende del estado en el que se encuentre la entidad receptora.
En este ejemplo se muestran dos casos muy distintos:
- agenteVivo → está en un bucle con ADVANCE, siempre activo.
- agenteDormido → está detenido en una instrucción REST, esperando indefinidamente.
El agente vivo tiene una tares de procesar un texto que tarda un tiempo considerable. Mientras no lo está procesando, muestra constantemente el tiempo AC1, pero cuando entra en el proceso, no es capaz de hacerlo notándose que el tiempo no se actualiza.
Si cambiamos la salida del procedure a:
RETURN P$PARAM_A + P$PARAM_B
Notaremos que las llamadas a sumar interrumpen la tarea.
En resumen, esto permite ver las diferencias reales entre:
- RETURN
- RETURN_RESTORE
- RETURN_RETRY
PARA EL AGENTE VIVO (en ADVANCE)
- RETURN -> ERROR
El agente vuelve a su ejecución normal.
El problema es que el agente da por terminado su ADVANCE y finaliza el proceso AUNQUE aún le falte tiempo de ejecución. - RETURN_RESTORE -> CORRECTO
El agente vuelve correctamente a su ejecución normal.
No pierde su turno ni su posición temporal.
El advance del proceso que estuviese ejecutando continúa exactamente donde se interrumpió. - RETURN_RETRY -> ERROR FATAL Error fatal, la entidad vuelve a ejecutar el SIGNALNOW indefinidamente. Usar este retorno está reservado a circunstancias en las que se sabe que la entidad está en la cola de un recurso.
PARA EL AGENTE DORMIDO (en RESTROOM)
- RETURN -> ERROR
RETURN indica que el procedimiento ha terminado, por lo que el agente continúa con el siguiente paso de su programa. Ese paso es TERMINATE_VE, por lo que el agente muere y la siguiente llamada de signalnow no tendrá agente receptor. - RETURN_RESTORE -> CORRECTO
El agente vuelve correctamente a su ejecución normal dentro del RESTROOM. - RETURN_RETRY -> CASI CORRECTO
El agente vuelve a ejecutar el REST quedando de nuevo dormido en el RESTROOM. No está en la cola del restroom, por lo que volverá a entrar indicando que el restroom tiene una entidad más cuando es incorrecto. Para evitarlo, habría que tratarlo como si interrumpiésemos una entidad en un SEIZE sacándola primero de la lista de ocupantes con WAKE.
Example:
/* SIGNAL y SIGNALNOW en agentes permanentes */ SYSTEM {TYPE:PRE_RUN, TRIGGER:PRE_RUN} POSITION {NAME:POS_1, X:615, Y:398} Graphic {NAME:T_resultado1, type:TEXT, X:425, Y:281,text:"resultado1"} Graphic {NAME:T_resultado2, type:TEXT, X:425, Y:256,text:"resultado2"} Graphic {NAME:T2, type:TEXT, X:430, Y:501} Graphic {NAME:T3, type:TEXT, X:430, Y:531} Graphic {NAME:T4, type:TEXT, X:426, Y:310} Graphic {NAME:T5, type:TEXT, X:425, Y:188} RESTROOM {name:RestRoomAgenteDormido,x:423,y:118} START 200 /* ---- PRE RUN: Crear los agentes ---- */ PROCEDURE PRE_RUN TIMEOUT agenteVivo.loop, 0 TIMEOUT agenteDormido.loop, 0 TERMINATE_VE ENDPROCEDURE /* ---- GENERADOR DE ENTIDADES NORMALES ---- */ GENERATE 15,0 {NAME:G1, X:153, Y:411} ASSIGN miValor, D$N * 10 MOVE {name:T4, text:"Entidad D$N comienza con miValor = P$miValor"} ADVANCE 10 {to:POS_1} ; Llamada SIGNAL diferida SIGNAL agenteVivo.procesar, X$nAgenteVivo, "Hola" ; Llamada SIGNALNOW inmediata SIGNALNOW agenteVivo.sumar, X$nAgenteVivo, P$miValor, 5 MOVE {name:T_resultado1, text:"Resultado del agente Vivo = P$sumar"} SIGNALNOW agenteDormido.sumar, X$nAgenteDormido, P$miValor, 5 MOVE {name:T_resultado2, text:"Resultado del agente dormido = P$sumar"} ENDGENERATE 4 /* ---- AGENTE VIVO ---- */ PROCEDURE agenteVivo.loop SAVEVALUE nAgenteVivo, D$N assign procesando,0 WHILE (1==1) MOVE {name:T3, text:"Agente Vivo [P$(nAgente)] activo en t = AC1$"} ADVANCE 2 ENDWHILE terminate_ve ENDPROCEDURE /* ---- AGENTE DORMIDO ---- */ PROCEDURE agenteDormido.loop SAVEVALUE nAgenteDormido, D$N assign procesando,0 MOVE {name:T5, text:"Agente Dormido [P$(nAgente)] activo"} rest RestRoomAgenteDormido terminate_ve ENDPROCEDURE /* ---- PROCEDIMIENTOS INVOCADOS POR ENTIDADES ---- */ PROCEDURE agenteVivo.procesar if (P$procesando==1) return endif assign procesando,1 MOVE {name:T2, text:"SIGNAL → agente INICIA proceso mensaje: P$PARAM_A"} ADVANCE 80 MOVE {name:T2, text:"SIGNAL → agente FINALIZA proceso mensaje: P$PARAM_A"} assign procesando,0 RETURN ; viene de signal y no afecta el tipo a la entidad ENDPROCEDURE PROCEDURE agenteVivo.sumar ; PARAM_A = valor base ; PARAM_B = incremento ; RETURN P$PARAM_A + P$PARAM_B ; finaliza el proceso para admitir otro RETURN_RESTORE P$PARAM_A + P$PARAM_B ; el proceso permanece en su tiempo ; RETURN_RETRY P$PARAM_A + P$PARAM_B ; explota por no estar en un SEIZE o similar ENDPROCEDURE ;------------------------------------------------------------------- PROCEDURE agenteDormido.sumar ; PARAM_A = valor base ; PARAM_B = incremento ; RETURN P$PARAM_A + P$PARAM_B ; explota por morir el agente al salir del restroom RETURN_RESTORE P$PARAM_A + P$PARAM_B ; procesa quedandose el agente en su restroom ; WAKE RestRoomAgenteDormido,0,X$nAgenteDormido ; saca al agente de estar en REST ; RETURN_RETRY P$PARAM_A + P$PARAM_B ; procesa reiniciando el agente su restroom ENDPROCEDURE -
- + Procedimientos de VE: TIMER, TIMEOUT, ON_*, PRE_RUN
TIMEOUT / ON_* / PRE_RUN / TIMER
Estos procedimientos son ejecutados por entidades virtuales (VE) recién creadas.
Las VE deben finalizar como cualquier entidad con unTERMINATEoTERMINATE_VE. La diferencia entre ambos BLOQUES es que la primera finaliza cualquier entidad y la segunda solo entidades virtuales. Usando el bloqueTERMINATE_VE, elPROCEDUREpodrá ser invocado para ser ejecutado por ambos tipos de entidades.
Es importante decir que deben ser TERMINADAS obligatoriamente pues de llegar al ENDPROCEDURE no sabrían donde retornar.TIMEOUT abrirRecurso, 50, P$valor, V$Objeto PROCEDURE abrirRecurso move {name:text1, text:"Ejecutado en t=AC1$"} TERMINATE_VE ENDPROCEDURE
Example:
POSITION {NAME:Salida, X:624, Y:199} Graphic {NAME:T1, type:TEXT, X:493, Y:505} Graphic {NAME:T2, type:TEXT, X:493, Y:476} Graphic {NAME:T3, type:TEXT, X:492, Y:444} Facility {NAME:Ventana, ON_RELEASE: cuandoSale, X:249, Y:335 } SYSTEM {TYPE:PRE_RUN, TRIGGER:PRE_RUN} START 50 ;---------------------------------------- PROCEDURE PRE_RUN move {name:T1, text:"PRE_RUN ejecutado en t = AC1$"} TIMEOUT avisoInicial, 10 TERMINATE_VE ENDPROCEDURE ;---------------------------------------- GENERATE 15,0 {NAME:"GEN1", X:100, Y:100} ADVANCE 10 {to:Ventana} SEIZE Ventana ADVANCE 5 RELEASE Ventana ; disparará ON_RELEASE ADVANCE 10 {to:Salida} ENDGENERATE 1 ;---------------------------------------- PROCEDURE avisoInicial move {name:T2, text:"TIMEOUT ejecutado en t = AC1$"} TERMINATE_VE ENDPROCEDURE PROCEDURE cuandoSale move {name:T3, text:"ON_RELEASE ejecutado en t = AC1$"} TERMINATE_VE ENDPROCEDURE - + SCAPE / LOAD / UNLOAD *
SCAPE
Es una llamada especial que tiene como destino un
GENERATE.En un motor basado en colas y listas finitas, el stack también debe considerarse una estructura acotada.
Las transiciones estructurales de una entidad no pueden depender indefinidamente de apilar retornos.
Por ello, GPSS-Plus incorporaSCAPEcomo salto estructural sin retorno, capaz de reiniciar la ejecución desde unGENERATEy mantener el tamaño del stack bajo control.SCAPEse usa cuando una entidad debe abandonar completamente su flujo actual y comenzar uno nuevo.
Esto es útil cuando una condición requiere reiniciar, cambiar de comportamiento o bifurcar el flujo de manera irreversible.El salto
SCAPElleva a los únicos puntos seguros limpios de stack de direcciones: losGENERATES.
Conservará todos los valores de assign.SCAPE nombreGenerate, 50, P$valor, V$Objeto
BACKPACK (LOAD / UNLOAD)
Una entidad solo puede ser cargada (LOAD) si está en REST porque en ese estado:
-
Está dormida.
-
No consume ciclo.
-
No puede despertar sola, solo mediante
WAKEpor terceros. -
Es “segura” de manipular.
Por eso el BACKPACK es una herramienta de logística no de control de flujo. Se transporta cualquier entidad.
Mecanismo para transportar entidades dormidas en un
RESTROOM.-
LOAD: la entidad cargada es retirada del
RESTROOMy pasa al backpack. -
UNLOAD: al llegar al destino, la entidad descargada empieza una nueva vida desde un
GENERATEespecificado.
En el ejemplo:
En este ejemplo se simula una ciudad y un museo conectados por una carretera.
Los ciudadanos generan su propio flujo de vida: algunos viajan en vehículo particular y otros esperan en la parada de autobús.Cuando llegan al museo o regresan a la ciudad, las entidades “cambian de mundo” utilizando SCAPE, iniciando un nuevo flujo en el generador correspondiente.
Los autobuses funcionan como transportistas: cargan ciudadanos dormidos (LOAD), los desplazan por la carretera y los descargan en el generador de destino (UNLOAD), donde cada uno continúa su propio flujo.
De este modo, cada entidad continúa su ciclo natural según su medio de transporte.
Example:
POSITION {NAME:Salida, X:178, Y:39} POSITION {NAME:inicioCarretera, X:150, Y:313} POSITION {NAME:finCarretera, X:514, Y:314} Facility {NAME:museo, capacity:50, X:534, Y:77 } Restroom {NAME:paradaAutobusCiudad, X:68, Y:321 } Restroom {NAME:paradaAutobusMuseo, X:588, Y:312 } START 500 ;---------------------------------------- GENERATE 15,0 {NAME:"GenUsuarios", X:100, Y:100 } if (P$museoVisitado==1) advance 100,50 {from:inicioCarretera ,to:Salida} terminate 1 endif ASSIGN TIPO,0 ; EN VEHICULO PARTICULAR if (RANDOM >0.2) ASSIGN TIPO,1 ; EN AUTOBUS endif advance 10 {to:inicioCarretera} if (P$TIPO==1) REST paradaAutobusCiudad endif advance 50,10 {to:finCarretera} SCAPE GenMuseo ENDGENERATE 1 ;---------------------------------------- GENERATE 0,0,0,0 {NAME:"GenMuseo", X:600, Y:160 } advance 20,30 {from:finCarretera,to:museo} seize museo advance 30,50 assign museoVisitado,1 mod {color:green} release museo advance 10 {to:finCarretera} if (P$TIPO==1) REST paradaAutobusMuseo endif advance 50 {to:inicioCarretera} SCAPE GenUsuarios ENDGENERATE 1 ;---------------------------------------- ;---------------------------------------- GENERATE 50,0,0,2 {NAME:"GenAutobuses", X:300, Y:460,ecolor:red,eradio:10,visible:0 } advance 50 {to:inicioCarretera} while (1==1) load miBackpackIda, paradaAutobusCiudad mod {subtitle:"Pasajeros P$(miBackpackIda.LENGTH)"} advance 80,10 {to:finCarretera} unload miBackpackIda, GenMuseo advance 10 load miBackpackVuelta, paradaAutobusMuseo mod {subtitle:"Pasajeros P$(miBackpackVuelta.LENGTH)"} advance 80,10 {to:inicioCarretera} unload miBackpackVuelta, GenUsuarios advance 10 endwhile ENDGENERATE 0 -
- + Recursos físicos
- + Generalidades *
Modelo general de los recursos
En GPSS-Plus, los recursos comparten una estructura común basada en listas internas de entidades.
Cada recurso puede tener una o dos listas, y el comportamiento del recurso se define principalmente por:-
la función de cada lista
-
el criterio de entrada en ella
-
el criterio de salida
-
si esa lista retiene a la entidad o permite que continúe en la cola de eventos
De este modo, la semántica de los recursos no depende solo de su nombre (
FACILITY,STORAGE, etc.), sino de la organización interna de sus listas y de cómo interactúan con la cola de eventos del motor.Tipos de recursos disponibles en GPSS-Plus:
-
Facility → Recurso exclusivo con capacidad. Ej.: máquina, servidor.
-
Storage → Recurso acumulativo. Ej.: almacén, depósito.
-
Restroom → Recurso retenedor. Las entidades esperan a ser liberadas.
-
Conditions → Recurso retenedor condicional. Paso según lógica.
-
Stock → Almacén inteligente de productos etiquetados.
-
Stater → Máquina de estados finitos. Control de procesos.
-
Queuer → Recurso abierto. Para conteo, agrupación o análisis.
Permiten modelar capacidades compartidas, espacios físicos, almacenes, puntos de sincronización, etc. Cada tipo de recurso define una lógica propia de uso, pero todos pueden conectarse con procedimientos a través de eventos (hooks) comoON_SEIZE,ON_LEAVE, etc.Histogramas automáticos:
Todos los recursos permiten generar histogramas automáticos sobre su uso definiendo su tabulación:
R_BIN_*: Tabula la ocupación del [R] Recurso.
R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:40
E_BIN_*: Tabula los tiempos de ocupación de la [E] Entidad.
E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:40
SNA asociados:
Mediante
R$(nombreRecurso,propiedad)puedes consultar en tiempo real:X, Y→ Posición gráficaLEFT, IN, QUEUE, ENTRIES, CAPACITY→ Estado operativoLOCK→ 0 o 1 según si la entrada está bloqueadaOCCUPIED→ (solo en STORAGE) cantidad actual ocupada
R$(Fac1,LEFT) ; Espacio disponible R$(Fac1,QUEUE) ; Tamaño de de cola R$(Fac1,LOCK) ; 0|1 Bloqueada la entrada
HOOKs
Dependiendo del recurso en particular, pueden disponer de determinados Hooks atendidos por procedures ejecutados por entidades virtuales (VE).
Se crearán entidades virtuales (VE) que recorrerán el trigger y nacerán con el assignENTITYNUMBER.Facility {NAME:Fac2, CAPACITY:3, X:100, Y:100, ON_ATTEMPT:Fac1_attempt} ;------------------------ PROCEDURE Fac1_attempt MOVE {NAME:Text1,Text:"La entidad P$ENTITYNUMBER ha intentado entrar"} TERMINATE_VE ENDPROCEDURE
Example:
POSITION {NAME:Salida,X:615,Y:388} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 160} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 180} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 200} Facility {NAME:Facility1,X:324,Y:560 ,capacity:3 ,ON_ATTEMPT:FACILITY1_attempt ,ON_SEIZE:FACILITY1_seize ,ON_RELEASE:FACILITY1_release ,ON_QUEUE:FACILITY1_queue } Storage {NAME:Storage1,X:324,Y:235 ,capacity:30 ,ON_ATTEMPT:STORAGE1_attempt ,ON_ENTER:STORAGE1_enter ,ON_LEAVE:STORAGE1_leave ,ON_QUEUE:STORAGE1_queue } START 1000 ;------------------------------- GENERATE 10,0 {NAME:GEN1,X:62,Y:396} if (D$N%2==1) advance 10 {to:Facility1} seize Facility1 advance 55,10 release Facility1 else advance 10 {to:Storage1} enter Storage1,random * 25 + 1 advance 35,10 leave Storage1 endif advance 10 {to:Salida} ENDGENERATE 1 ;------------------------------- PROCEDURE FACILITY1_release move {name:Text1,text:"AC1$ Soy la VE [D$N] de ON_RELEASE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_queue move {name:Text2,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_seize move {name:Text3,text:"AC1$ Soy la VE [D$N] de ON_SEIZE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_attempt move {name:Text4,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure ;------------------------------- PROCEDURE STORAGE1_leave move {name:Text5,text:"AC1$ Soy la VE [D$N] de ON_LEAVE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_queue move {name:Text6,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_enter move {name:Text7,text:"AC1$ Soy la VE [D$N] de ON_ENTER la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_attempt move {name:Text8,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure -
- + Facility
FACILITY
Modela un recurso exclusivo (como una máquina, un operador o una cabina).
Permite múltiples entidades según sucapacityy cola si está ocupado.
Internamente gestiona dos listas: Entidades ocupantes y de entidades en espera.Soporta varios métodos de selección de entidad entrante a través del parámetro
METHOD:- "FIFO" Primero en entrar, primero en salir. Devuelve el primero de la lista (orden de llegada).
- "LIFO" Último en entrar, primero en salir. Recorre hasta el último nodo en la lista.
- default Equivale a "FIFO" si no se especifica método.
Bloques asociados:
- SEIZE nombreRecurso ; Intenta ocupar el recurso si hay capacidad disponible. Si no, la entidad se encola.
- RELEASE nombreRecurso; Libera el recurso y permite el acceso de otra entidad.
Eventos disponibles:
ON_ATTEMPT,ON_QUEUE,ON_SEIZE,ON_RELEASEFacility {NAME:Fac1, CAPACITY:3, X:100, Y:100} Facility {NAME:Fac2, CAPACITY:3, X:100, Y:100, ON_ATTEMPT:Fac1_attempt, E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:40 } ;------------------------ SEIZE Fac1 ADVANCE 10 RELEASE Fac1
Example:
/* Recursos. Facility */ POSITION {NAME:Salida,X:615,Y:388} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 160} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 180} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 200} Facility {NAME:Facility1,X:324,Y:160 ,capacity:3 ,ON_ATTEMPT:FACILITY1_ATTEMPT ,ON_SEIZE:FACILITY1_SEIZE ,ON_RELEASE:FACILITY1_RELEASE ,ON_QUEUE:FACILITY1_QUEUE ,R_BIN_SIZE:1,R_BIN_COUNT:10 ,E_BIN_SIZE:1,E_BIN_COUNT:10 } START 1000 ;------------------------------- GENERATE 10,0 {NAME:GEN1,X:62,Y:396} advance 10 {to:Facility1} seize Facility1 advance 55,10 release Facility1 advance 10 {to:Salida} ENDGENERATE 1 ;------------------------------- PROCEDURE FACILITY1_RELEASE move {name:Text1,text:"AC1$ Soy la VE [D$N] de ON_RELEASE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_QUEUE move {name:Text2,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_SEIZE move {name:Text3,text:"AC1$ Soy la VE [D$N] de ON_SEIZE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE FACILITY1_ATTEMPT move {name:Text4,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure - + Storage
STORAGE
Modela un recurso exclusivo tipo almacén en el que la ocupación viene definica por cantidades a aportar por cada entidad.
Permite múltiples capacidades según sucapacityy cola si no hay espacio disponible.
Internamente gestiona dos listas: Entidades ocupantes con su carga y de entidades en espera.Soporta varias lógicas de selección de entrada a través del parámetro opcional
METHOD:Bloques asociados:
- ENTER nombreRecurso,cantidad ; Intenta ocupar el recurso si hay capacidad disponible. Si no, la entidad se encola.
- LEAVE nombreRecurso; Libera el recurso en la cantidad aportada y permite el acceso de otra entidad.
Eventos disponibles:
ON_ATTEMPT,ON_QUEUE,ON_ENTER,ON_LEAVE
Soporta varios métodos de selección de entidad entrante a través del parámetro
METHOD:- "FIFO" Primero en entrar, primero en salir. Devuelve el primero de la lista (orden de llegada).
- "LIFO" Último en entrar, primero en salir. Recorre hasta el último nodo en la lista.
- "MIN_SPACE" Elige a la entidad que necesita menos espacio (y cabe en lo disponible).
- "MAX_SPACE" Elige a la entidad que necesita más espacio (dentro del espacio disponible).
- default Equivale a "FIFO" si no se especifica método.
Estadísticas adicionales: EQ_BIN_* RQ_BIN_* Por capacidad utilizada.Storage {NAME:Sto1, CAPACITY:3, X:100, Y:100,METHOD:MIN_SPACE} Storage {NAME:Sto2, CAPACITY:3, X:100, Y:100, ON_ATTEMPT:Fac1_attempt, E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:40 } ;------------------------ Enter Sto2,6 ADVANCE 10 RELEASE Sto2
Example:
/* Recursos. Storage */ POSITION {NAME:Salida,X:615,Y:388} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 160} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 180} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 200} Storage {NAME:Storage1,X:324,Y:235 ,capacity:30 ,ON_ATTEMPT:STORAGE1_attempt ,ON_ENTER:STORAGE1_enter ,ON_LEAVE:STORAGE1_leave ,ON_QUEUE:STORAGE1_queue ,E_BIN_START:34,E_BIN_SIZE:1,E_BIN_COUNT:12 ,R_BIN_SIZE:1,R_BIN_COUNT:10 ,EQ_BIN_START:34,EQ_BIN_SIZE:1,EQ_BIN_COUNT:12 ,RQ_BIN_START:0,RQ_BIN_SIZE:1,RQ_BIN_COUNT:32 } START 1000 ;------------------------------- GENERATE 10,0 {NAME:GEN1,X:62,Y:396} advance 10 {to:Storage1} enter Storage1,random * 25 + 1 advance 35,10 leave Storage1 advance 10 {to:Salida} ENDGENERATE 1 ;------------------------------- PROCEDURE STORAGE1_leave move {name:Text5,text:"AC1$ Soy la VE [D$N] de ON_LEAVE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_queue move {name:Text6,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_enter move {name:Text7,text:"AC1$ Soy la VE [D$N] de ON_ENTER la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE STORAGE1_attempt move {name:Text8,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure - + Restroom
RESTROOM
Modela un recurso retenedor.
Las entidades entran y quedan retenidas automáticamente en espera de que otra entidad la libre.
Internamente gestiona una lista: Entidades ocupantes.
Este recurso es especialmente útil para dormir agentes o mantener entidades en espera pasiva (no activa).Bloques asociados:
- REST nombreRecurso ; La entidad queda retenida
- WAKE nombreRecurso[,cantidad de entidades a liberar][,número de entidad a liberar]; Libera las entidades determinadas si se especifica (0 ó -1 si es por numero de entidad) o libera solo el número de entidad si se especifica
Eventos disponibles:
ON_REST,ON_WAKERestroom {NAME:Agentes, X:100, Y:100, ON_REST:Restroom1_onrest, E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:40 } ;------------------------ REST Agentes ; el agente para a inactivo ;------------------------ WAKE Agentes ; Despiesta todos los agentes WAKE Agentes,0,X$nAgente ; Despierta un agente en concreto
Example:
/* Recursos. Restroom */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;SYSTEM {TYPE:OPTIONS,Speed:8} Restroom {NAME:Restroom_agentes,X:100,Y:100} POSITION {NAME:POS1,X:237,Y:449} POSITION {NAME:POS2,X:269,Y:334} POSITION {NAME:POS3,X:272,Y:202,type:terminate,title:end} Graphic {NAME:textAgente,Type:TEXT,X:430,Y:471,Text:"Agente"} Graphic {NAME:Text2,Type:TEXT,X:431,Y:523,Text:"Entidad"} initial conta,0 initial nAgente,0 START 500 ;***************************************************** PROCEDURE PRE_RUN timeout agente.main,1 TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 10,0,0,0 {NAME:GEN1,X:43,Y:300} ADVANCE 20,0 {TO:POS1} if (D$N%4==2) signalnow agente.Suma,X$nAgente signalnow agente.Resta,X$nAgente savevalue resultado,P$(agenteDato,X$nAgente) move {name:Text2,text:"Soy Entidad D$N : resultado X$resultado"} endif ADVANCE 20,0 {TO:POS2} ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 ;******************************* procedure agente.main savevalue nAgente,D$N assign agenteDato,10 while (1==1) move {name:textAgente,text:"Soy Agente X$nAgente [AC1: AC1$]"} REST Restroom_agentes endwhile endprocedure ;********************************** procedure agente.Suma ASSIGN agenteDato,P$agenteDato + 2 return_restore endprocedure ;********************************** procedure agente.Resta ASSIGN agenteDato,P$agenteDato - 1 return_restore endprocedure - + Conditions
Conditions
Modela un recurso retenedor condicional.
Una entidad puede acceder directamente o quedar retenida según se cumplan ciertas condiciones lógicas, tanto generales como particulares.Lógica de retención:
El recurso evalúa tres tipos de condiciones:
-
EXPRESIÓN GENERAL (
EXPRESSION)
Definida en el propio recurso (afecta a todas las entidades). -
EXPRESIÓN PARTICULAR
Especificada en el bloqueWAITUNTILpara una entidad concreta. -
EXPRESIÓN ABSOLUTA
Indicada enWAITCHECK, y sobreescribe las demás. Si se cumple, libera las entidades.
Para que una entidad continúe, deben cumplirse ambas expresiones (GENERAL y PARTICULAR), salvo que se utilice una EXPRESIÓN ABSOLUTA, que actúa como única condición liberadora.
La liberación o paso de la entidad se produce a través del chequeo. Este chequeo se produce siempre que una entidad es liberada o cuando se solicita expresamente.
Las expresiones siempre se indican entre paréntesis.
Internamente gestiona una lista: Entidades ocupantes.
Este recurso es especialmente útil como multi-semáforo general o sala de espera para varios recursos en conjunto.
El chequeo puede ser cada tick o tiempo determinado a través de un TIMER.
Lo habitual es establecer los chequeos en los HOOKs de los recursos implicados.Bloques asociados:
- WAITUNTIL nombreRecurso[,(expresionParticular)] ; La entidad queda retenida si no cumple la expresión ABSOLUTA o la PARTICULAR (si están definidas)
- WAITCHECK nombreRecurso[,(expresionAbsoluta)]; Chequea todas las entidades retenidas. Si se indica la expresíon ABSOLUTA, ésta será el único criterio liberador.
Eventos disponibles:
ON_ATTEPMT,ON_CHECK, ON_QUEUEConditions {NAME:semaforo, EXPRESSION:(D$N %2 == 1) X:100, Y:100, ON_CHECK:semaforo_check} ;------------------------ WAITUNTIL semaforo; La entidad continúa si es impar; (La entidad queda retenida si su número es par.) WAITUNTIL semaforo,(D$N %3 == 0); La entidad continúa si es impar y múltiplo de 3. (3,9,15...) ;------------------------ WAITCHECK semaforo; Chequea todas las entidades retenidas WAITCHECK semaforo,(1==1) ; Libera todas las entidades retenidas WAITCHECK semaforo,(D$N %2 == 0) ; Libera todas las entidades pares
Example:
/* Recursos. Conditions */ SYSTEM {TYPE:ON_TIMER, TRIGGER:TIMER1, INTERVAL: 350} SYSTEM {TYPE:ON_TIMER, TRIGGER:TIMER2, INTERVAL: 650} POSITION {NAME:Salida,X:615,Y:388} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 100} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 120} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 140} Conditions {NAME:Conditions1,X:324,Y:160 ,expression:(D$N % 3 == 0) ,ON_ATTEMPT:Conditions1_ATTEMPT ,ON_CHECK:Conditions1_CHECK ,ON_QUEUE:Conditions1_QUEUE } START 100 ;------------------------------- GENERATE 20,0 {NAME:GEN1,X:62,Y:396} advance 10 {to:Conditions1} waituntil Conditions1,(D$N!=3) move {name:Text1,text:"AC1$ Soy la Entidad [D$N] y avanzo"} advance 100,50 {to:Salida} endgenerate 1 ;------------------------------- PROCEDURE TIMER1 waitcheck Conditions1,(D$N%2==1) move {name:Text6,text:"AC1$ Soy TIMER [D$N] WAITCHECK las impares"} TERMINATE_VE ENDPROCEDURE PROCEDURE TIMER2 waitcheck Conditions1,(1==1) move {name:Text7,text:"AC1$ Soy TIMER [D$N] WAITCHECK TODOS"} TERMINATE_VE ENDPROCEDURE PROCEDURE Conditions1_QUEUE move {name:Text3,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE Conditions1_CHECK move {name:Text4,text:"AC1$ Soy la VE [D$N] de ON_CHECK la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure PROCEDURE Conditions1_ATTEMPT move {name:Text5,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure ;------------------------------- -
- + Stock
STOCK
STOCK modela un almacén inteligente de productos etiquetados, que permite entradas y salidas de items con tipo y cantidad. Soporta múltiples entradas simultáneas, comprobaciones de disponibilidad y eventos (hooks) conectables a lógica externa.
Es ideal para modelar inventarios, mercados, almacenes de componentes, etc.
Estructura y comportamiento
El recurso almacena productos en forma de objetos {clave: cantidad}, organizados internamente por tipo (clave).
Permite múltiples operaciones simultáneas de carga y descarga, acumulando cantidades por producto.Bloques asociados:
- STOCKIN nombreRecurso,nombreVariable ; Añade productos al Stock. La variable debe ser un objeto con forma
{clave1: cantidad1 , clave2:cantidad2}. - STOCKOUT nombreRecurso,nombreVariable ; Extrae productos del STOCK, si hay disponibilidad suficiente.
La variable debe ser un objeto con forma{clave1: cantidad1 , clave2:cantidad2}.
SNA asociados:
SC$(recurso, objeto)Retorna 0 ó 1 si el recurso tiene suficientes cantidades del objeto para poder realizar STOCKOUT.R$(nombre,STOCK,clave)Devuelve el stock actual de un tipo concreto.
VS$(nombre)→ Devuelve el stock completo como objeto {clave1: qty1 , clave2: qty2, ...}.
Eventos disponibles:ON_ATTEMPT,ON_STOCKIN,ON_STOCKOUT,ON_QUEUESTOCK {NAME:MARKET1,X:331,Y:210 ,ON_QUEUE:MARKET1_QUEUE ,ON_STOCKIN:MARKET1_STOCKIN ,ON_STOCKOUT:MARKET1_STOCKOUT ,ON_ATTEMPT:MARKET1_ATTEMPT ,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:20 ,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:100 } ;------------------------ assign mesa,round(random * 30) assign silla,round(random * 100) assign armario,round(random * 5) assign lampara,round(random * 5) assign camion,{mesa:P$mesa,silla:P$silla,armario:P$armario} assign.merge camion,{lampara:P$lampara} STOCKIN MARKET1, CAMION ;------------------------
Example:
/* Recursos. Stock */ SYSTEM {TYPE:ON_TIMER, TRIGGER:MARKET1_TIMER, INTERVAL: 20} STOCK {NAME:MARKET1,X:331,Y:210 ,ON_QUEUE:MARKET1_QUEUE ,ON_STOCKIN:MARKET1_STOCKIN ,ON_STOCKOUT:MARKET1_STOCKOUT ,ON_ATTEMPT:MARKET1_ATTEMPT ,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:20 ,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:100 } POSITION {NAME:POS1,X:70,Y:113} POSITION {NAME:POS2,X:595,Y:283} initial posY,500 Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 140} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 160} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 180} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 200} START 300 ;***************************************************************** ; PROVEEDORES: Generan productos para añadir al STOCK GENERATE 115,0 {NAME:PROVEEDORES,X:619,Y:194,ECOLOR:#006666,ERADIO:15} ADVANCE 20,0 {TO:MARKET1} assign mesa,ROUND(RANDOM * 30) assign silla,round(random * 100) assign armario,round(random * 5) assign lampara,round(random * 5) assign camion,{mesa:P$mesa,silla:P$silla,armario:P$armario} assign.merge camion,{lampara:P$lampara} STOCKIN MARKET1, V$camion MOD {RADIO:5} ADVANCE 20,0 {TO:POS2} TERMINATE 1 ;***************************************************************** ; CLIENTES: Consumen productos del STOCK GENERATE 20,2 {NAME:CLIENTES,X:81,Y:207,ECOLOR:#666666} assign carrito,{} assign.merge carrito,{mesa:2} assign.merge carrito,{silla:4} if (SC$(MARKET1,carrito)==0) move {name:Text1,text:"SIN STOCK"} else move {name:Text1,text:"STOCK SUFICIENTE"} endif ADVANCE 10,0 {TO:MARKET1} STOCKOUT MARKET1, V$carrito MOD {RADIO:8} ADVANCE 50,50 {TO:POS1} TERMINATE 1 ;------------------------------- PROCEDURE MARKET1_STOCKOUT ; MAPPER es objeto {mesa:N,silla:N} move {name:Text2,text:"ON_STOCKOUT Mesas: P$(MAPPER.mesa) Sillas: P$(MAPPER.silla)"} TERMINATE_VE endprocedure PROCEDURE MARKET1_STOCKIN ; MAPPER es objeto {mesa:N,silla:N} move {name:Text3,text:"ON_STOCKIN Mesas: P$(MAPPER.mesa) Sillas: P$(MAPPER.silla)"} TERMINATE_VE endprocedure PROCEDURE MARKET1_ATTEMPT ; MAPPER es objeto {mesa:N,silla:N} move {name:Text4,text:"ON_ATTEMPT Mesas: P$(MAPPER.mesa) Sillas: P$(MAPPER.silla)"} TERMINATE_VE endprocedure PROCEDURE MARKET1_QUEUE ; MAPPER es objeto {mesa:N,silla:N} move {name:Text5,text:"ON_QUEUE Mesas: P$(MAPPER.mesa) Sillas: P$(MAPPER.silla)"} TERMINATE_VE endprocedure ;------------------------------- PROCEDURE MARKET1_TIMER assign tmp,VS$(MARKET1) assign txt,"" foreach clave,IN_OBJECT,V$(tmp) assign txt,"P$(txt) | P$(clave) : P$(tmp.P$(clave))" endforeach move {name:Text6,text:"AC1$ ON_TIMER [P$txt]"} TERMINATE_VE endprocedure - STOCKIN nombreRecurso,nombreVariable ; Añade productos al Stock. La variable debe ser un objeto con forma
- + Backpack
Backpack no es un recurso como tal ya que en realidad no realiza funciones internas, es más bien una herramienta de transporte de entidades, pero sí es cierto que las retiene.
Para poder llevar entidades de un punto a otro de la simulación, por ejemplo, una furgoneta con paquetes se necesita algo que indique al sistema que esas entidades ya no están disponibles en la cola de eventos ni en ninguna otra cola.
Este concepto podríamos llamarlo mochila (Backpack) donde una entidad podrá transportar entidades. Existen dos limitaciones:
Solo se puede cargar desde un
RESTROOMya que es un recurso retenedor en la que las entidades no salen por sí mismas y sólo se pueden descargar en unGENERATEya que es el único punto seguro con respecto a la pila de direcciones de la entidad (véaseSCAPE).Tiene dos bloques asociados:
LOADnombreMochila,nombreRestroom[,númeroEntidad]UNLOADnombreMochila,nombreGenerate[,númeroEntidad]
El primero carga en la mochila todo el contenido de un Restroom o la entidad con ese número y el segundo es su paso inverso en el
GENERATE.Las entidades en la mochila pueden obtenerse a través del propio
ASSIGNgenerado con el mismo nombre de la mochila. Es un array con los números de las entidades.El ejemplo es el recorrido de una furgoneta que pasa por dos puntos de recogida y lleva los paquetes al punto de distribución.
Example:
RESTROOM {NAME:almacenReceptor1,X:220,Y:348,E_BIN_SIZE:1,E_BIN_COUNT:10} RESTROOM {NAME:almacenReceptor2,X:217,Y:182,E_BIN_SIZE:1,E_BIN_COUNT:10} RESTROOM {NAME:almacenDistribucion,X:662,Y:93} Graphic {NAME:Text1,Type:TEXT,X:100,Y:100,Text:"Terminado: NO",font:"20",color:red} START 1000 ;************************************************************************ GENERATE 8,3 {NAME:Recepcion1,X:66,Y:356} ADVANCE 20,0 {TO:almacenReceptor1} rest almacenReceptor1 terminate 1 ;************************************************************************ GENERATE 5,3 {NAME:Recepcion2,X:65,Y:181} ADVANCE 20,0 {TO:almacenReceptor2} rest almacenReceptor2 terminate 1 ;************************************************************************ GENERATE 40,0,0,1 {NAME:Furgonetas,X:40,Y:567 ,eradio:16,ecolor:red,visible:0 ,esubtitle:"P$(mochila1.LENGTH)"} ADVANCE0 {TO:PuntoDistribucion} while (1==1) ADVANCE 20,30 {TO:almacenReceptor1} load mochila1,almacenReceptor1 ADVANCE 20,30 {TO:almacenReceptor2} load mochila1,almacenReceptor2 ADVANCE 20,30 {TO:PuntoDistribucion} unload mochila1,PuntoDistribucion endwhile terminate 1 ;************************************************************************ GENERATE 0,0,0,0 {NAME:PuntoDistribucion,X:669,Y:434} ADVANCE0 {TO:PuntoDistribucion} ADVANCE 20,50 {TO:almacenDistribucion} if (D$N>1000) move {name:Text1,text:"TERMINADO: SÍ",color:green} stop endif rest almacenDistribucion terminate 1
- + Generalidades *
- + Recursos lógicos
- + Table
Example:
FACILITY {NAME:VENTANILLA1,X:380,Y:348,capacity:4} POSITION {NAME:POS1,X:218,Y:437} POSITION {NAME:POS2,X:591,Y:429} POSITION {NAME:POS3,X:713,Y:329} Graphic {NAME:Line1,Type:L,color:#FF0000, X1:218,Y1:500,X2:592,Y2:500} Graphic {NAME:Text1,Type:T,X:410,Y:527,Text:"Estadistic section"} TABLE {name: TABLA1,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:100,EXPRESSION:(M1$ - P$TIEMPOINICIO)} START 100 ;*************************************************************** GENERATE 8,3 {NAME:GEN1,X:66,Y:350} ADVANCE 30,0 {TO:POS1} ASSIGN TIEMPOINICIO,M1$ ADVANCE 20,0 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE 20,20 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS2} TABULATE TABLA1 ADVANCE 20,0 {TO:POS3} TERMINATE 1 ;*************************************************************** - + FSM - Máquina de Estados Finitos *
FSM - Máquina de Estados Finitos
El bloque
FSMpermite modelar una Máquina de Estados Finitos. Se trata de un recurso que gestiona estados internos definidos mediante una tabla de transiciones, activadas por entradas (INPUT).La lógica de funcionamiento se define mediante un objeto JSON con los siguientes campos:
STATES: Lista de estados posibles (opcional si se usaEVAL: 1)TRANSITIONS: Lista de transiciones entre estadosINITIAL: Estado inicial (*Sólo para LOCAL:0)EVAL: (opcional) Si es1, permite usar expresiones matemáticas enTO.
Cada transición puede contener:
- FROM: define el estado previo. Si se define como
""actúa como comodín (acepta cualquier estado). - INPUT: nombre del input.
""actúa como comodín. - TO: nuevo estado (valor directo o expresión si
EVAL:1). - TRIGGER: (opcional) procedimiento que se dispara al hacer la transición.
; EJEMPLO BÁSICO initial logic, { STATES: ["open", "close"], TRANSITIONS: [ {FROM: "open", INPUT: "close", TO: "close", TRIGGER: "puertaAbierta"}, {FROM: "close", INPUT: "open", TO: "open"}, {FROM: "close", INPUT: "switch", TO: "open"}, {FROM: "open", INPUT: "switch", TO: "close"} ], INITIAL: "open" } FSM {NAME:FSM1,X:434,Y:540, LOGIC:V$(logic)} ; EJEMPLO CICLICO initial logic2, { states: ["uno", "dos", "tres"], TRANSITIONS: [ {FROM: "uno", INPUT: "siguiente", TO: "dos"}, {FROM: "dos", INPUT: "siguiente", TO: "tres"}, {FROM: "tres", INPUT: "siguiente", TO: "uno", TRIGGER: "reinicio"} ], INITIAL: "open" } FSM {NAME:FSM2,X:134,Y:140, LOGIC:V$(logic2)} ; EJEMPLO LÓGICA EVALUADA ; En este modo (eval: 1), los estados y transiciones pueden evaluarse como expresiones matemáticas dinámicas. initial logicTemp3, { TRANSITIONS: [ {FROM: "", INPUT: "sube", TO: "(X + 1 <= 24 ? X + 1.5 : X)"}, {FROM: "", INPUT: "baja", TO: "(X - 1 >= 18 ? X - 1.5 : X)"}, {FROM: "", INPUT: "reset", TO: "21"} ], EVAL: 1, INITIAL: 21 } FSM {NAME:Stater3, X:434, Y:540, LOGIC:V$(logicTemp3)} ; EJEMPLO LÓGICA EVALUADA CON PARÁMETRO ADICIONAL Y ; SE PUEDEN AÑADIR PARÁMETROS Y, Z A AS FUNCIONES initial logicTemp4, { TRANSITIONS: [ {FROM: "", INPUT: "sube", TO: "(X + 1 <= 24 ? X + Y : X)"}, {FROM: "", INPUT: "baja", TO: "(X - 1 >= 18 ? X - Y : X)"}, {FROM: "", INPUT: "reset", TO: "21"} ], EVAL: 1, INITIAL: 21 } FSM {NAME:Stater4, X:434, Y:540, LOGIC:V$(logicTemp4)}Bloques asociados:
- STATE nombreRecurso,input[, paramY [,paramZ]] ; Ejecuta una transición de estado según la lógica definida.
STATE Fsm1,"OPEN" ; pasa a estado "CLOSE" STATE Fsm1,"SWITCH" ; si estaba en "OPEN" pasa a "CLOSE" y viceversa. STATE Fsm2,"siguiente" ; si estaba en "DOS" pasa a "TRES",... STATE Fsm4,"subir",10 ; incrementa el state en 10
SNA asociado:
FSM es el único recurso que ofrece una operación atómica de consulta y modificación del estado.
- R$(nombreFSM,STATE) Devuelve el estado actual.
- R$(nombreFSM,IN_AFTER,input) Devuelve el estado actual y ejecuta el input en OPERACIÓN ATÓMICA.
- R$(nombreFSM,IN_BEFORE,input) Ejecuta el input y devuelve el estado actual en OPERACIÓN ATÓMICA.
- R$(nombreFSM,IN_BEFORE,input,Y,Z) Ejecuta el input con parámetros Y,Z para FSM tipo EVAL:1 y devuelve el estado actual en OPERACIÓN ATÓMICA.
Esto permite modelar zonas críticas, semáforos y sincronización entre procesos.
Usos típicos
- Control de zonas críticas
- Semáforos
- Exclusión mutua
- Sincronización de procesos
- Funciones matemáticas con estado y parámetros
waituntil Conditions1,("R$(Fsm1,IN_AFTER,close)"=="open") ; la entidad pasa y retiene las posteriores ... STATE Fsm1,"open" ; finaliza la zona de exclusión mutua waitcheck Conditions1 ; da paso al siguienteY como almacén de funciones matemáticas con ejecución de dos parámetros adicionales:
{ FROM: "", INPUT: "incr", TO: "(X + Y * Z)" } ; X: State actual, Y,Z Parámetros extra de inputEventos disponibles: TRIGGER
Cada transición puede incluir un trigger, que llamará a un
PROCEDURE:PROCEDURE puertaAbierta move {name:text7,text:"La entidad P$ENTITYNUMBER ha abierto la puerta"} TERMINATE_VE endprocedureModos de almacenamiento:
Su modo por defecto es global, un estado por
STATER, pero si se define:LOCAL:1su modo es de un estado para cada entidad. Perfecto como discriminador de caminos que evita el uso de
SWITCHanidados.Dado que no se assigna valor inicialmente, éste se asignará mediente el acceso directo al assign asociado:
assign Fsm1,10
Example:
POSITION {NAME:Salida,X:648,Y:383} initial posY,500 initial logic, { STATES: ["open", "close"], TRANSITIONS: [ {FROM: "open", INPUT: "close", TO: "close", TRIGGER: "puertaAbierta"}, {FROM: "close", INPUT: "open", TO: "open"}, {FROM: "close", INPUT: "switch", TO: "open"}, {FROM: "open", INPUT: "switch", TO: "close"} ], INITIAL: "open" } FSM {NAME:FSM1,X:434,Y:540, LOGIC:V$(logic)} Graphic {NAME:Text1,Type:TEXT,X:324,Y:X$posY - 0} Graphic {NAME:Text2,Type:TEXT,X:324,Y:X$posY - 20} Graphic {NAME:Text3,Type:TEXT,X:324,Y:X$posY - 40} Graphic {NAME:Text4,Type:TEXT,X:324,Y:X$posY - 60} Graphic {NAME:Text5,Type:TEXT,X:324,Y:X$posY - 80} Graphic {NAME:Text6,Type:TEXT,X:324,Y:X$posY - 100} Graphic {NAME:Text7,Type:TEXT,X:324,Y:X$posY - 120} Graphic {NAME:Text8,Type:TEXT,X:324,Y:X$posY - 140} Conditions {NAME:Conditions1,X:317,Y:539 ,expresion:("R$(FSM1,IN_AFTER,close)"=="open") ,ON_ATTEMPT:Conditions1_ATTEMPT ,ON_CHECK:Conditions1_CHECK ,ON_QUEUE:Conditions1_QUEUE } START 100 ;------------------------------- GENERATE 20,0 {NAME:GEN1,X:62,Y:396} advance 10 {to:Conditions1} waituntil Conditions1 advance 15,25 {to:Salida} STATE FSM1,"open" waitcheck Conditions1 terminate 1 ;------------------------------- PROCEDURE Conditions1_QUEUE move {name:Text3,text:"AC1$ Soy la VE [D$N] de ON_QUEUE la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure 1 PROCEDURE Conditions1_CHECK move {name:Text4,text:"AC1$ Soy la VE [D$N] de ON_CHECK la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure 1 PROCEDURE Conditions1_ATTEMPT move {name:Text5,text:"AC1$ Soy la VE [D$N] de ON_ATTEMPT la entidad P$ENTITYNUMBER"} TERMINATE_VE endprocedure 1 ;------------------------------- PROCEDURE puertaAbierta move {name:Text7,text:"La entidad P$ENTITYNUMBER ha abierto la puerta"} TERMINATE_VE endprocedure 1 ;------------------------------- - + Queuer
QUEUER
Modela un recurso abierto.
Permite múltiples entidades sin criterio.
Internamente gestiona una lista de entidades en el recurso.
Su uso principal es estadístico o como agrupador de entidades.Bloques asociados:
- QUEUE nombreRecurso ; Intenta ocupar el recurso si hay capacidad disponible. Si no, la entidad se encola.
- DEPART nombreRecurso; Libera el recurso y permite el acceso de otra entidad.
Eventos disponibles:
ON_QUEUE,ON_DEPARTQUEUER {NAME:Qventanilla1,X:374,Y:424 ,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:20 ,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:20} ;------------------------ queue Qventanilla1 seize ventanilla1 depart Qventanilla1
Example:
/* Recursos. Queuer */ ;SYSTEM {TYPE:OPTIONS,Speed:50,Pause:0} POSITION {NAME:POS1,X:620,Y:360} QUEUER {NAME:Qventanilla1,X:374,Y:424 ,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:20 ,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:20} Facility {NAME:ventanilla1,X:373,Y:365,capacity:5} START 200 ;***************************************************** GENERATE 5,3,0,0 {NAME:GEN1,X:111,Y:366} ADVANCE 10 {TO:ventanilla1} queue Qventanilla1 seize ventanilla1 depart Qventanilla1 ADVANCE 20,10 release ventanilla1 ADVANCE 10 {TO:POS1} ENDGENERATE 1 - + Bridger, Dynamic...
Existen varios recursos más con sus propias secciones como Bridger y Dynamic.
- + Table
- + Configuración del sistema
El comando
SYSTEMpermite configurar distintos aspectos del motor de simulación. Su sintaxis básica es:SYSTEM {TYPE:..., ...}Parámetros de simulación (velocidad, precisión...)
Puedes controlar la velocidad de simulación, la precisión temporal y la precisión decimal del tiempo:SYSTEM {TYPE:OPTIONS, SPEED:3} SYSTEM {TYPE:OPTIONS, TIME_DECIMALS:2} SYSTEM {TYPE:OPTIONS, width:1400, height:1400} SYSTEM {TYPE:OPTIONS, SEED:1400}SPEED: Velocidad inicial de reproducción (por defecto:5).TIME_DECIMALS: Permite que el tiempo AC1 tenga valores como 3.14 en lugar de valores enteros (por defecto:0).WIDTH: Ancho del canvas de simulación. Por defecto 800.HEIGHT: Alto del canvas de simulación. Por defecto 600.SEED: Genera la secuencia de números aleatorios por Xorshift128+.TRACE_ROUTES: Genera las trazas para V&V
2.- Mostrar información básica del sistema
Puedes activar o desactivar la visualización de elementos clave del motor:
SYSTEM {TYPE:OPTIONS, SHOW_BASICS:1}Esto hará que se muestren en la parte inferior:
TG1: Tiempo global inicialAC1: Tiempo actualSPEED: Velocidad de simulación
3.- Temporizadores (TIMER)
Los temporizadores permiten ejecutar procedimientos periódicamente, sin intervención de entidades:
SYSTEM {TYPE:ON_TIMER, TRIGGER:llenado, INTERVAL:0.1}TRIGGER: nombre del procedimiento a ejecutar.INTERVAL: intervalo de tiempo (en unidades de simulación) entre ejecuciones.
Esto es útil para tareas de monitorización, logging, cargas periódicas, etc.
Example:
SYSTEM {TYPE:OPTIONS, SPEED:5, TIME_DECIMALS:1, SHOW_BASICS:0} SYSTEM {TYPE:ON_TIMER, TRIGGER:actualizarGraficos, INTERVAL:0.5} PROCEDURE actualizarGraficos move {name:text1:text: "Texto actualizado a AC1$"} TERMINATE_VE ENDPROCEDURE - + Seguimiento, informe y debugging
La plataforma cuenta con herramientas visuales y técnicas que permiten el seguimiento detallado de la simulación, tanto a nivel de ejecución como de resultados.
Panel de depuración
Desde el tercer panel (canvas de reproducción, seguimiento y debug, editor de código), puedes acceder a:
-
Cola de eventos
Muestra en tiempo real qué entidades están programadas, su posición temporal (TG1) y en qué paso del programa se encuentran. -
Recursos
Detalla las entidades ocupantes, aquellas en espera (cola), y la capacidad de cada recurso. -
Entidades
Visualiza el estado de cada entidad: variables, posición, paso actual, retardo, etc. -
Ficheros
Se muestran todos los archivos creados mediante el comandoFILEy el bloqueWRITE.
Incluye también el archivo especialDEBUG, que se genera automáticamente si se activan instrucciones con la etiqueta{debug:1}o{debug:2}.-
{debug:1}registra información general de la ejecución de la línea. -
{debug:2}incluye valores de variables evaluadas y resultados detallados.
-
if (P$variable == 1) {debug:1} assign P$variable, X$origen {debug:2}Botón de informe
Mediante el botón Informe, se genera una visión estadística completa de la simulación:
- Información general de la simulación, tiempo final (
AC1), número de entidades procesadas... - Estado e historial de cada recurso y sus gráficas.
- Información de los PLOTTER y su gráficas.
-
- + Filosofía del DSL
- + Season 4: Control de recursos y colas
- + Accediendo y midiendo un recurso
Este ejemplo presenta el uso básico de un recurso tipo
STORAGE, útil para modelar inventarios, almacenes o zonas de capacidad limitada. Las entidades consumen unidades aleatorias del recurso, representando una carga variable.El interés del ejemplo está en cómo obtener el contenido del recurso en tiempo real por dos métodos diferentes:
-
Suma de datos individuales: usando
FOREACH, se recorre cada entidad que ocupa el recurso y se suman sus valores asociados (en este caso, el número de unidades que ha tomado). -
Consulta directa: mediante
R$(ALMACEN1,LEFT)se obtiene el número de unidades libres, por lo que el total ocupado esCAPACITY - LEFT.
Ambos enfoques permiten contrastar y validar la información, y se pueden aplicar para cálculos estadísticos, control de inventarios o gestión de alertas de saturación.
El
TIMERperiódicamente actualiza la información mostrada en pantalla, ofreciendo una visión continua del estado del recurso.
Example:
/* Accediendo y midiendo un recurso */ STORAGE {NAME: ALMACEN1, CAPACITY:40, X:316,Y:401} SYSTEM {TYPE:ON_TIMER,INTERVAL:50,TRIGGER:PROCTIMER} GRAPHIC {NAME:BANNER1,TYPE:TEXT,X:184,Y:343,TEXT:ALEATORIO.} GRAPHIC {NAME:BANNER2,TYPE:TEXT,X:305,Y:283,TEXT:SUMA} GRAPHIC {NAME:BANNER3,TYPE:TEXT,X:306,Y:241,TEXT:DIRECT} POSITION {NAME:POS1,X:176,Y:296} POSITION {NAME:POS2,X:452,Y:300} POSITION {NAME:POS3,X:559,Y:299} START 100 ;****************************************************** GENERATE 30,10 {NAME:GEN1,X:61,Y:297} ASSIGN ALEATORIO,FLOOR(RANDOM * 9 + 1) {debug:1} MOVE {NAME:BANNER1,TEXT:"ALEATORIO: P$ALEATORIO"} ADVANCE 20 {TO:POS1} ADVANCE 20 {TO:ALMACEN1} ENTER ALMACEN1 ,P$ALEATORIO ADVANCE 110,90 LEAVE ALMACEN1 ADVANCE 20 {TO:POS2} ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 ;***************************************************** PROCEDURE PROCTIMER ASSIGN SUMA,0 FOREACH NUMERO,IN_RESOURCE,ALMACEN1 ASSIGN SUMA,(P$(ALEATORIO,P$NUMERO) + P$SUMA) ENDFOREACH MOVE {NAME:BANNER2,TEXT:"SUMA ALEATORIOS: P$SUMA"} ASSIGN DIRECT,40-R$(ALMACEN1,LEFT) MOVE {NAME:BANNER3,TEXT:"DIRECT: P$DIRECT"} TERMINATE_VE ENDPROCEDURE ;***************************************************** -
- + Gestionando el tiempo de uso
No todos los recursos deben atender con la misma duración a cada entidad. En ciertos escenarios —como servicios al cliente, centros de atención médica o estaciones de procesamiento— puede ser razonable adaptar el tiempo de atención en función de la carga del sistema.
En este ejemplo, tres ventanillas (
Facility_1,Facility_2,Facility_3) reciben flujos de entidades con distinta intensidad. Cada una está acompañada por unQueuer, que permite medir y registrar el tamaño actual de la cola.Antes de ser atendida, cada entidad llama a un procedimiento que calcula dinámicamente su tiempo de atención, basándose en el tamaño actual de la cola del recurso.
La lógica usada en este caso es una de las siguientes:
assign tamCola,R$(P$ventanilla,QUEUE) + 1 ASSIGN tiempoAtencion, round(max(2, 120 / P$tamCola)) ASSIGN tiempoAtencion, round(max(2, 120 / sqrt(P$tamCola))) ASSIGN tiempoAtencion, round(120 / log(P$tamCola + 1))Esto significa que:
-
A mayor cola, menor tiempo de atención, priorizando fluidez.
-
A menor cola, más tiempo por entidad, mejorando la calidad del servicio.
Es una estrategia de balanceo automático entre calidad y rendimiento.
Esta técnica demuestra:
-
Cómo vincular un recurso con su
Queuerpara medir carga. -
Cómo usar funciones matemáticas para adaptar la duración de los
ADVANCE. -
Cómo mantener bajo control el tamaño de la cola sin sacrificar la atención.
El ejemplo puede ser fácilmente extendido a:
-
Funciones más complejas de atención.
-
Decisión sobre qué ventanilla elegir.
-
Optimización del rendimiento global del sistema.
Example:
/* Gestionando el tiempo de uso */ Facility {NAME:Facility_1,X:400,Y:84,capacity:3,E_BIN_SIZE:1,E_BIN_COUNT:200} Facility {NAME:Facility_2,X:400,Y:282,capacity:3,E_BIN_SIZE:1,E_BIN_COUNT:200} Facility {NAME:Facility_3,X:400,Y:471,capacity:3,E_BIN_SIZE:1,E_BIN_COUNT:200} Queuer {NAME:Queuer_1,X:400,Y:174,R_BIN_SIZE:1,R_BIN_COUNT:30} Queuer {NAME:Queuer_2,X:400,Y:363,R_BIN_SIZE:1,R_BIN_COUNT:30} Queuer {NAME:Queuer_3,X:400,Y:557,R_BIN_SIZE:1,R_BIN_COUNT:30} Graphic {NAME:Text_1,Type:TEXT,X:400,Y:132} Graphic {NAME:Text_2,Type:TEXT,X:400,Y:323} Graphic {NAME:Text_3,Type:TEXT,X:400,Y:512} POSITION {NAME:POS_1,X:700,Y:137} POSITION {NAME:POS_2,X:700,Y:328} POSITION {NAME:POS_3,X:700,Y:506} START 1000 ;********************************************************* GENERATE 10,0 {NAME:GEN1,X:100,Y:126} CALL caminoVentanilla,1 ENDGENERATE 1 GENERATE 15,0 {NAME:GEN2,X:100,Y:319} CALL caminoVentanilla,2 ENDGENERATE 1 GENERATE 20,0 {NAME:GEN3,X:100,Y:492} CALL caminoVentanilla,3 ENDGENERATE 1 ;---------------------------------- PROCEDURE caminoVentanilla assign ventanilla,"Facility_P$PARAM_A" assign cola,"Queuer_P$PARAM_A" {debug:1} assign nVentanilla,"P$PARAM_A" ADVANCE 20 {TO:"P$ventanilla"} CALL calcularTiempo , "P$ventanilla",P$nVentanilla QUEUE P$cola SEIZE P$ventanilla DEPART P$cola ADVANCE P$calcularTiempo RELEASE P$ventanilla ADVANCE 20 {TO:"POS_P$nVentanilla"} ENDPROCEDURE ;---------------------------------- PROCEDURE calcularTiempo assign ventanilla,"P$PARAM_A" assign nVentanilla,P$PARAM_B assign tamCola,R$(P$ventanilla,QUEUE) + 1 ;ASSIGN tiempoAtencion, round(max(2, 120 / P$tamCola)) ;ASSIGN tiempoAtencion, round(max(2, 120 / sqrt(P$tamCola))) ASSIGN tiempoAtencion, round(120 / log(P$tamCola + 1)) move {name:"Text_P$nVentanilla",text:"tiempo Atención: P$tiempoAtencion"} RETURN P$tiempoAtencion ENDPROCEDURE -
- + Redirigir las colas
En este ejemplo, las entidades deben decidir por cuál de tres caminos avanzar, cada uno asociado a una ventanilla con su propia cola (
FACILITYcon distinta capacidad). La decisión se toma en la funciónDECIDE.SELECCIONA, que recorre una lista con los nombres de los caminos y el tamaño actual de sus colas (QUEUE). El resultado es el nombre del camino con menos carga.Ese valor es un
STRINGque se devuelve conENDPROCEDUREy se almacena automáticamente en la variableP$SELECCIONA, que luego se usa directamente como llamada:CALL P$SELECCIONA. Esta mecánica permite una selección dinámica sin necesidad de condicionales o múltiples llamadas explícitas.Las estructuras
.decidese usan así para devolver directamente el nombre del procedimiento a ejecutar, ahorrando al programador tener que hacer un dobleSWITCHo una cascada deIF.Esto simplifica notablemente la lógica de decisión ya que con simplemente:
CALL DECIDE.SELECCIONA CALL P$SELECCIONA
sustituye a:
CALL DECIDE.SELECCIONA SWITCH P$SELECCIONA CASE ==, "CAMINO1" CALL CAMINO1 CASE ==, "CAMINO2" CALL CAMINO2 ... ENDSWITCH
Example:
/* Redirigir las colas */ FACILITY {NAME:VENTANILLA1,X:320,Y:450,capacity:3} FACILITY {NAME:VENTANILLA2,X:320,Y:300,capacity:1} FACILITY {NAME:VENTANILLA3,X:320,Y:150,capacity:2} POSITION {NAME:POS1,X:152,Y:300} POSITION {NAME:POS2,X:497,Y:300} Graphic {NAME:Text1,Type:TEXT,X:100,Y:100} START 200 ;************************************************************************* GENERATE 6,0 {NAME:GEN1,X:54,Y:300} ADVANCE 20,0 {TO:POS1,flow:1} CALL DECIDE.SELECCIONA ; return strings : "CAMINO1", "CAMINO1" ó "CAMINO1" creando un ASSIGN llamado P$SELECCIONA CALL P$SELECCIONA ADVANCE 20 {TO:POS2,flow:1,merge:"camino"} ENDGENERATE 1 ;************************************************************************* PROCEDURE DECIDE.SELECCIONA assign mimap, [ {cola:"CAMINO1",encola: R$(VENTANILLA1,QUEUE)}, {cola:"CAMINO2",encola: R$(VENTANILLA2,QUEUE)}, {cola:"CAMINO3",encola: R$(VENTANILLA3,QUEUE)} ] ASSIGN MINKEY,"CAMINO1"; inicializamos el KEY seleccionado ASSIGN MINVAL,100000 ; inicializamos el VAL de menor valor para las comparaciones FOREACH tmp,IN,V$mimap IF (P$(tmp.encola) < P$MINVAL) ASSIGN MINKEY,"P$(tmp.cola)" ASSIGN MINVAL,P$(tmp.encola) move {name:Text1,Text:"Decisión: P$(MINKEY) Cola: P$(MINVAL)"} ENDIF ENDFOREACH ENDPROCEDURE "P$MINKEY" ; retornará, por ejemplo, "C1" ;************************************************************************** PROCEDURE CAMINO1 ADVANCE 20 {TO:VENTANILLA1,flow:1,decision:"camino"} SEIZE VENTANILLA1 ADVANCE 25,10 RELEASE VENTANILLA1 ENDPROCEDURE PROCEDURE CAMINO2 ADVANCE 20 {TO:VENTANILLA2,flow:1,decision:"camino"} SEIZE VENTANILLA2 ADVANCE 80,70 RELEASE VENTANILLA2 ENDPROCEDURE PROCEDURE CAMINO3 ADVANCE 20 {TO:VENTANILLA3,flow:1,decision:"camino"} SEIZE VENTANILLA3 ADVANCE 30,20 RELEASE VENTANILLA3 ENDPROCEDURE ;*************************************************************** - + Actualizando la cola de eventos: UPDATE
Hemos visto anteriormente el bloque ADVANCE como algo que parecía inmutable. Por ejemplo:
ADVANCE 20,10
El rol de
UPDATEUna entidad que está dentro de un
ADVANCEno puede auto-modificar su tiempo de activación, ya que está inactiva. Por tanto, debe ser otra entidad (usualmente una entidad virtual, activada por unTIMERo unHOOK) la que ejecuteUPDATEpara ajustar su tiempo.Técnicamente, UPDATE no modifica un ADVANCE: modifica la cola de eventos.
Extrae la entidad de su activación futura y la reprograma en un nuevo tiempo absoluto.
El motor no interpreta el cambio: solo mantiene la cola ordenada.Escenario: Condiciones cambiantes en una carretera
Simulamos un tramo de carretera bajo ciertas condiciones almacenadas en el
SAVEVALUEconditions.-
En condiciones normales (
conditions = 1.0), se tarda 100 unidades de tiempo en cruzar. -
Si
conditions = 1.5, el trayecto dura 150 unidades de tiempo. -
Una entidad calcula su tiempo de avance cuando entra en el tramo.
-
Si las condiciones cambian mientras una entidad está en camino, queremos ajustar su tiempo de llegada, para reflejar este cambio.
¿Cómo se calcula?
Imagina que una entidad entró cuando
conditions = 1.2(tiempo de recorrido = 120), pero ahora las condiciones mejoran a1.0. Si ya ha recorrido el 50%, le quedarían 50 unidades con las nuevas condiciones. En total, habría tardado 110 en lugar de 120.El bloque
UPDATEUPDATE entidadID, nuevoTiempo
Este comando reprograma a una entidad con un nuevo tiempo de activación, siempre que dicho tiempo sea ≥
AC1$(el tiempo actual de simulación).Qué demuestra este ejemplo:
-
Que el comportamiento de las entidades puede ser modificado incluso mientras están en curso.
-
Que
TIMER + FOREACH + UPDATEforman una combinación para reaccionar dinámicamente. -
Que se permite representar escenarios del mundo real, donde las condiciones cambian y el sistema debe adaptarse.
Example:
/* Actualizando la cola de eventos: UPDATE */ SYSTEM {TYPE:ON_TIMER, TRIGGER:TIMER1, INTERVAL: 100} Queuer {NAME:Queuer1,X:350,Y:324} Graphic {NAME:Text1,Type:TEXT,X:352,Y:381} POSITION {NAME:POS1,X:90,Y:513} POSITION {NAME:POS2,X:638,Y:512} POSITION {NAME:POS3,X:635,Y:322} START 100 ;********************************************************* INITIAL defaultTime,100 INITIAL conditions,1.0 ;********************************************************* PROCEDURE TIMER1 savevalue oldConditions,X$conditions savevalue conditions,round(random + 0.5,2) MOVE {NAME:Text1,TEXT:"Old Conditions: X$oldConditions \nNew conditions: X$conditions"} FOREACH number,IN_RESOURCE,Queuer1 assign myConditions,X$conditions,P$number ASSIGN from, D$(ADVANCESTART, P$number) ASSIGN lapse, D$(ADVANCELAPSE, P$number) ASSIGN completedRatio , (AC1$ - P$from) / P$lapse ASSIGN remainingRatio , 1 - P$completedRatio ASSIGN adjustedRemainingTime , P$remainingRatio * X$defaultTime * X$conditions ASSIGN newTime, AC1$ + P$adjustedRemainingTime if (X$conditions<1) MOD {number:P$number,color:#00DD00} else MOD {number:P$number,color:#000000} endif if (P$newTime < AC1$) assign newTime,AC1$ endif Update P$number,P$newTime ENDFOREACH TERMINATE_VE ENDPROCEDURE ;********************************************************* GENERATE 20,0 {NAME:GEN1,X:102,Y:203, ECOLOR:#FF3333, ERADIO:8,esubtitle:P$myConditions} ADVANCE 16,5 {TO:POS1} assign myTime,X$defaultTime * X$conditions assign myConditions,X$conditions Queue Queuer1 ADVANCE P$myTime,0 {TO:POS2} Depart Queuer1 MOD {color:#FF3333} ADVANCE 16,5 {TO:POS3} ENDGENERATE 1 -
- + Accediendo y midiendo un recurso
- + Season 5: Gráficos
- + Crear y modificar
Crear y modificar
GPSS-Plus permite definir elementos gráficos que se pueden mover, transformar y actualizar durante la simulación. Estos objetos pueden ser textos, curvas, imágenes, arcos o líneas, y pueden agruparse para formar unidades visuales completas.
Los gráficos pueden moverse de forma individual o en grupo, y se pueden modificar sus propiedades como:
- Posición (
X,Y) - Rotación (
ROTATE) - Tamaño (
RESIZE) - Opacidad (
OPACITY) - Contenido textual (
TEXT) - Color y ángulos, en figuras como
ARCoLINE
Los comandos
MOVEpermiten usar:- Valores absolutos, como
X:100 - Valores relativos, accediendo al valor actual mediante
GD$, por ejemplo:X:GD$(objeto,X) + 10
Este ejemplo muestra cómo una entidad, a lo largo de sus pasos, modifica variables internas (
SAVEVALUE) y usa esas variables para actualizar objetos gráficos en cada avance.Se ilustra el uso de gráficos de tipo
TEXT,CURVE3,CURVE,ARC,IMAGEyGROUP, así como el uso combinado de animaciones relativas, escalado y rotación.Sobre curvas y relleno
GPSS-Plus admite dos tipos de curvas:
- CURVE3: curva de tres puntos (Bezier simple), declarada con coordenadas directas
X1,Y1,X2,Y2,X3,Y3 - CURVE: curva suavizada tipo Catmull-Rom, definida con una lista de puntos
Para declarar los puntos, existen dos formas equivalentes:
- Sintaxis compacta:
POINTS:"[x1,y1],[x2,y2],[x3,y3],..." - Sintaxis directa por pares:
X1:1,Y1:2, X2:3,Y2:4, X3:5,Y3:6
Las curvas, líneas o arcos pueden ser abiertos o cerrados. Para representarlos como figuras cerradas con relleno, es necesario establecer:
CLOSE:1FCOLOR:para el color de relleno
Example:
/* Crear y modificar gráficos */ SYSTEM {TYPE:OPTIONS, SPEED:8, TIME_DECIMALS:1} ;============================== ; VARIABLES DINÁMICAS ;============================== INITIAL GRADO, 0 INITIAL ALTURA, 80 INITIAL ESCALA, 100 INITIAL CRECIENDO, 1 ;============================== ; ELEMENTOS GRÁFICOS ;============================== GRAPHIC {NAME:txt, TYPE:TEXT, X:300, Y:50,text:"--test--"} GRAPHIC {NAME:radarGrupo, TYPE:GROUP, X:300, Y:400} GRAPHIC { GROUP:radarGrupo, NAME:radarTexto, TYPE:TEXT, TEXT:"GRADO: X$GRADO", COLOR:#00AAFF, X:0, Y:-50 } GRAPHIC { GROUP:radarGrupo, NAME:radarImagen, TYPE:IMAGE, SRC:"PUERTA", X:100, Y:100, OPACITY:0.9, ROTATE:0 } GRAPHIC { GROUP:radarGrupo, NAME:ondaVisual, TYPE:CURVE, POINTS:"[0,0],[40,X$ALTURA],[80,0]", COLOR:red, WIDTH:2, OPACITY:0.6 } GRAPHIC { NAME:puerta, TYPE:IMAGE, SRC:"PUERTA", X:400, Y:100, OPACITY:0.9, ROTATE:0 } GRAPHIC { NAME:barreraCircular, TYPE:ARC, X:100, Y:400, COLOR:#FFAA00, RADIUS:60, START_ANGLE:0, END_ANGLE:X$GRADO, OPACITY:1, CLOSE:0 } ;============================== ; ENTIDAD PRINCIPAL ;============================== GENERATE 5, 0 {NAME:GEN1, X:50, Y:200} ;move {name:txt,text:"Pos X GD$(barreraCircular,X)"} ; Aumentar grado (rotación) SAVEVALUE GRADO, (X$GRADO + 15) % 360 ; Subir/bajar la onda IF ((X$GRADO % 180) < 90) SAVEVALUE ALTURA, X$ALTURA + 4 ELSE SAVEVALUE ALTURA, X$ALTURA - 4 ENDIF ; Animar el tamaño IF (X$CRECIENDO == 1) SAVEVALUE ESCALA, X$ESCALA + 5 IF (X$ESCALA >= 140) SAVEVALUE CRECIENDO, 0 ENDIF ELSE SAVEVALUE ESCALA, X$ESCALA - 5 IF (X$ESCALA <= 100) SAVEVALUE CRECIENDO, 1 ENDIF ENDIF ADVANCE 5, 0 ;============================== ; ACTUALIZACIONES VISUALES ;============================== MOVE {NAME:radarTexto, TEXT:"Grado: X$GRADO"} MOVE {NAME:radarImagen, ROTATE:X$GRADO} MOVE {NAME:radarImagen, RESIZE:X$ESCALA} MOVE {NAME:ondaVisual, Y2:X$ALTURA} MOVE {NAME:radarGrupo, Y:(GD$(radarGrupo,Y)+(RANDOM*10)-5)} MOVE {NAME:puerta, RESIZE_X:X$ESCALA * 2} MOVE {NAME:barreraCircular, END_ANGLE:X$GRADO} TERMINATE 1 START 500 - Posición (
- + Modificación por procedimiento
Antes de introducir el sistema de contextos
CX$para instanciar componentes gráficos reutilizables en LIBRERIAS INDEPENDIENTES, es importante comprender cómo se puede construir un componente visual manualmente, paso a paso, utilizando procedimientos (PROCEDURE) y estructuras de configuración (INITIAL).Este ejemplo no representa la forma óptima ni la más recomendable para implementar componentes gráficos reutilizables, pero cumple un papel esencial en el aprendizaje:
-
Permite entender cómo se declaran los gráficos agrupados (
GROUP). -
Muestra cómo parametrizar su geometría y posición mediante diccionarios (
INITIAL). -
Enseña cómo encapsular transformaciones visuales dentro de procedimientos.
-
Introduce la llamada de “funciones visuales” desde entidades con
CALL.
Este enfoque será más adelante reemplazado por el uso de contextos
CX$, pero conviene dominar primero este nivel “manual” para comprender en profundidad cómo GPSS-Plus convierte procedimientos en componentes visuales autónomos y reutilizables.En este ejemplo se representa un depósito con nivel visual, compuesto por un
GROUPque contiene:-
un marco exterior (
LINEcerrado) -
un nivel de relleno (
LINEcerrado, con altura variable) -
un texto con el porcentaje de llenado visible
Toda la geometría y la posición del depósito están definidas mediante una estructura de configuración (
config) y se aplican directamente a gráficos con nombres fijos. Aunque este enfoque simula una forma de parametrización, no es reutilizable tal como está: los nombres de los objetos gráficos están codificados de forma estática, lo que impide instanciar múltiples depósitos sin conflictos.Esta limitación se resolverá más adelante con el uso de contextos
CX$y librerías, que permitirán crear múltiples instancias visuales de un mismo componente, cada una con su propio estado y configuración.El procedimiento
nivel_initse encarga de generar los vértices del gráfico al inicio (PRE_RUN), y el procedimientodeposito_setactualiza visualmente el nivel de llenado según un porcentaje (P$PARAM_A).También se incluye
deposito_locate, que permite mover todo el grupo a una nueva posición.
Example:
/* Gráficos. Modificación por procedimiento */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;============================== ; CONFIGURACIÓN DEL DEPÓSITO ;============================== INITIAL config, {deposito_coords:[0, 0, 20, 200],deposito_position:[180,180]} ;============================== ; GRÁFICOS ;============================== GRAPHIC {NAME:Deposito, TYPE:GROUP, X:0, Y:0} ; Marco exterior GRAPHIC { NAME:Marco, GROUP:Deposito, TYPE:LINE, POINTS:"[0,0],[0,10],[10,10],[10,10]", COLOR:#555555, CLOSE:1 } ; Nivel interior (relleno) GRAPHIC { NAME:Nivel, GROUP:Deposito, TYPE:LINE, POINTS:"[0,300],[0,300],[40,300],[40,300]", COLOR:#3399FF, FCOLOR:#99CCFF, CLOSE:1 } ; Texto de porcentaje GRAPHIC { NAME:TextoNivel, GROUP:Deposito, TYPE:TEXT, X:0, Y:0, TEXT:"Nivel: 0%", COLOR:#000000 } START 100 PROCEDURE PRE_RUN timeout nivel_init,0 TERMINATE ENDPROCEDURE 1 ;============================== ; PROCEDIMIENTO DE ACTUALIZACIÓN ;============================== PROCEDURE nivel_init move {name:Marco ,X1:X$(config.deposito_coords.0)-4,Y1:X$(config.deposito_coords.1)-4 ,X2:X$(config.deposito_coords.2)+4,Y2:X$(config.deposito_coords.1)-4 ,X3:X$(config.deposito_coords.2)+4,Y3:X$(config.deposito_coords.3)+4 ,X4:X$(config.deposito_coords.0)-4,Y4:X$(config.deposito_coords.3)+4 } move {name:Nivel ,X1:X$(config.deposito_coords.0),Y1:X$(config.deposito_coords.1) ,X2:X$(config.deposito_coords.2),Y2:X$(config.deposito_coords.1) ,X3:X$(config.deposito_coords.2),Y3:X$(config.deposito_coords.3) ,X4:X$(config.deposito_coords.0),Y4:X$(config.deposito_coords.3) } MOVE {NAME:TextoNivel , x:(GD$(Marco,X1) + GD$(Marco,X2))/ 2 , y:X$(config.deposito_coords.1)-14, TEXT:"Nivel: PP$A%"} MOVE {NAME:Deposito , x:X$(config.deposito_position.0) , y:X$(config.deposito_position.1)} terminate endprocedure 1 PROCEDURE deposito_set ; PP$A = porcentaje deseado (0 a 100) ASSIGN yBase, X$(config.deposito_coords.1) ; y inferior ASSIGN yTop, X$(config.deposito_coords.3) ; y superior ASSIGN alturaMaxima, P$yBase - P$yTop ASSIGN alturaNivel, P$alturaMaxima * P$PARAM_A / 100 ASSIGN yActual, P$yBase - P$alturaNivel ; Mover vértices del nivel MOVE { NAME:Nivel, Y3:P$yActual, Y4:P$yActual } MOVE {NAME:TextoNivel,TEXT:"Nivel: P$PARAM_A%"} ENDPROCEDURE 1 PROCEDURE deposito_locate MOVE {NAME:Deposito , x:P$PARAM_A , y:P$PARAM_B} ENDPROCEDURE 1 ;============================== ; ENTIDAD QUE LO USA ;============================== GENERATE 25,0 {NAME:Gen1} CALL deposito_set, 25 ADVANCE 5 CALL deposito_set, 50 ADVANCE 5 CALL deposito_set, 75 ADVANCE 5 CALL deposito_set, 90 ADVANCE 5 CALL deposito_set, 10 ADVANCE 5 CALL deposito_locate, GD$(Deposito,X)+4,GD$(Deposito,Y)+4 TERMINATE 1 -
- + Ejemplo: Reloj analógico animado
Este ejemplo representa un reloj de agujas tradicional (analógico) utilizando primitivas gráficas. A través de un
PROCEDUREse inicializa el escenario con un arco de fondo, marcas horarias (TEXT) y las dos agujas (LINE). Una entidad virtual(TIMER)se genera periódicamente y actualiza las posiciones de las agujas usando trigonometría y variables temporales (SAVEVALUE).Se combinan:
-
ARCpara la circunferencia principal. -
TEXTpara los números y el reloj digital. -
LINEpara representar las agujas.
Es un caso claro donde la animación no viene de entidades móviles, sino de transformaciones visuales programadas.
Se puede observar la velocidad de reproducción, con un valor de
speed: 5aproximadamente se acompasaría elAC1con el segundero.
Example:
/* Gráficos. Reloj analógico animado */ SYSTEM {type:OPTIONS, TIME_DECIMALS:0, SPEED:7} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:ON_TIMER, TRIGGER:TIMER1, INTERVAL: 10} ; ANALOGIC CLOCK GRAPHIC {NAME:OUT,TYPE:ARC,X:0,Y:0,COLOR:#FFFF99,RADIUS:200,START_ANGLE:0,END_ANGLE:360,CLOSE:0} GRAPHIC {NAME:AT12,TYPE:TEXT,X:300,Y:500,TEXT:"12"} GRAPHIC {NAME:AT3,TYPE:TEXT,X:500,Y:300,TEXT:"3"} GRAPHIC {NAME:AT6,TYPE:TEXT,X:300,Y:100,TEXT:"6"} GRAPHIC {NAME:AT9,TYPE:TEXT,X:100,Y:300,TEXT:"9"} GRAPHIC {NAME:MINLINE,TYPE:LINE,COLOR:#F00,X1:268,Y1:361,X2:265,Y2:332} GRAPHIC {NAME:HOURLINE,TYPE:LINE,COLOR:#000,X1:240,Y1:361,X2:233,Y2:328} ; DIGITAL CLOCK GRAPHIC {NAME:TIME,TYPE:TEXT,X:300,Y:536,TEXT:"IT'S.. ",FONT:"26PX"} GRAPHIC {NAME:REALTIME1,TYPE:TEXT,X:575,Y:536,TEXT:"REALTIME.. ",FONT:"14PX"} GRAPHIC {NAME:REALTIME2,TYPE:TEXT,X:575,Y:516,TEXT:"REALTIME.. ",FONT:"14PX"} START 1 ; THE CLOCK GENERATE 100,0 {NAME:GEN1,VISIBLE:0,EVISIBLE:0,X:647,Y:99} TERMINATE 0 PROCEDURE PRE_RUN SAVEVALUE MIN,0 SAVEVALUE A,0 SAVEVALUE B,0 SAVEVALUE CENTROX,300 SAVEVALUE CENTROY,300 SAVEVALUE RADIOM,180 SAVEVALUE RADIOH,120 MOVE {NAME:OUT,X:X$CENTROX,Y:X$CENTROY} MOVE {NAME:MINLINE,x1:0,y1:0,x2:0,y2:0} MOVE {NAME:HOURLINE,x1:0,y1:0,x2:0,y2:0} TERMINATE_VE ENDPROCEDURE PROCEDURE TIMER1 assign sys,SYS$ ASSIGN sys, SYS$ MOVE {name: REALTIME1, text:"P$(sys.date.year)/P$(sys.date.month)/P$(sys.date.day)"} MOVE {name: REALTIME2, text:"P$(sys.date.hour):P$(sys.date.min):P$(sys.date.sec)"} MOVE {NAME:TIME,TEXT:"[X$HOR:X$MIN2]"} MOVE {NAME:MINLINE ,X1: (X$CENTROX) ,Y1:(X$CENTROY) ,X2:(X$CENTROX+SIN(X$A)*X$RADIOM) ,Y2:(X$CENTROY+COS(X$A)*X$RADIOM)} MOVE {NAME:HOURLINE ,X1:(X$CENTROX) ,Y1:(X$CENTROY) ,X2:(X$CENTROX+SIN(X$B)*X$RADIOH) ,Y2:(X$CENTROY+COS(X$B)*X$RADIOH)} SAVEVALUE MIN, (X$MIN+1) SAVEVALUE MIN2,(X$MIN %60) SAVEVALUE HOR, (FLOOR(X$MIN/60)) SAVEVALUE A, (MODULO(X$MIN,60) *2*PI)/60 SAVEVALUE B, (MODULO(X$MIN,720) *2*PI)/720 TERMINATE_VE ENDPROCEDURE -
- + En 3D
Aunque todo es representable en 2D, en ciertas simulaciones —especialmente las de naturaleza mecánica o con énfasis visual— puede ser deseable utilizar representaciones en 3D.
GPSS-Plus no pretende ser una herramienta de modelado 3D como tal; el enfoque está en facilitar simulaciones visualmente efectivas y fáciles de implementar. Por ello, el diseño 3D puede provenir de dos fuentes:
-
Ficheros externos
.GLB -
Primitivas geométricas integradas
Primitivas 3D disponibles
Tipo Descripción BOXCaja tridimensional con WIDTH,HEIGHT,DEPTHSPHEREEsfera con RADIUS,SEGMENTSopcionalesTRIANGLETriángulo PLANEPlano formado por dos triángulos que comparten arista PRISMPrisma regular entre dos puntos, con SIDESladosOBJECTObjeto externo en formato .GLBTransformaciones permanentes (al crear)
Propiedad Aplicación Descripción WIDTH,HEIGHT,DEPTHPermanente Redimensiona la geometría base displace_x/y/zPermanente Desplaza el modelo con respecto a su pivote interno rotate_x/y/zPermanente Gira el modelo respecto a su pivote interno Transformaciones dinámicas (en MOVE)
Acción Descripción MOVE_BETWEENPosiciona el objeto entre dos puntos manteniendo su tamaño STRETCH_BETWEENEscala el objeto en Y para ajustarse entre dos puntos rotate_yAñade rotación adicional sobre su eje Y, útil para tornillos o engranajes yEn MOVE_BETWEEN, permite desplazar a lo largo de la línea
Estas acciones son análogas a las uniones PRISMATIC y REVOLUTE en sistemas mecánicos, pero aplicadas directamente desde el conocimiento matemático de la posición del objeto.Ejemplos
; Coloca un muelle descrito en un fichero entre dos puntos definidos MOVE {name:muelle, STRETCH_BETWEEN:"[0,0,0],[0,P$x_masa,0]"} ; coloca un pistón o segmento telescópico a lo largo de un segmento en la posición "X" con respecto al su punto central MOVE {name:amortiguador, MOVE_BETWEEN:"[0,0,0],[0,P$x_masa,0]",y:P$x_masa -10}Activar el modo 3D
SYSTEM {TYPE:VISUAL, MODE:3D, V_WIDTH:70, V_HEIGHT:30, CAMERA:1}V_WIDTH,V_HEIGHT: área que ocuparán los objetos en unidades internas
CAMERA: preset de cámara (1 = isométrico, 2 = cenital, etc.)El ejemplo:
Para el ejemplo, se usan dos puntos para rotar, en ese mismo eje, una tuerca.
Example:
/* Gráficos. 3D */ SYSTEM {TYPE:PRE_RUN, TRIGGER:PRE_RUN} SYSTEM {TYPE:VISUAL, MODE:3D, V_WIDTH:40, V_HEIGHT:20, CAMERA:0} SYSTEM {TYPE:OPTIONS, TIME_DECIMALS:1, SPEED:5} GRAPHIC {NAME:suelo, TYPE:PLANE, X:25, POINTS:"[0,0,0],[0,0,40],[40,0,0]", color:#fabada} GRAPHIC {NAME:nut, TYPE:OBJECT, src:NUT, X:0, Y:0, Z:0,WIDTH:20, HEIGHT:20, DEPTH:20,rotate_x:90,opacity:0.9} Graphic {NAME:linea1,Type:LINE,X1:0,Y1:0,X2:0,Y2:500} Graphic {NAME:linea2,Type:LINE,X1:0,Y1:0,X2:500,Y2:0} Graphic {NAME:linea3,Type:LINE,X1:0,Y1:0,X2:0,Y2:0,Z2:500} Graphic {NAME:linea4,Type:LINE,POINTS:"[10,0,10],[150,150,150]",color:red} Graphic {NAME:Text1,Type:TEXT,X:20,Y:20,text:"sss",font:"2px"} START 1 ;=========================== ; PROCEDIMIENTOS ;=========================== PROCEDURE agente.init savevalue DT,0.1 savevalue velocidad,1 savevalue X,4 savevalue estado,0 WHILE (1==1) if (X$estado==0) savevalue X,X$X + X$DT * X$velocidad else savevalue X,X$X - X$DT * X$velocidad endif if (X$X>10) savevalue estado,1 endif if (X$X<4) savevalue estado,0 endif assign altura, round(X$X,3) move {name:Text1,text:"Altura: P$altura"} ; La tuerca se coloca y rota sobre su eje MOVE {name:nut, MOVE_BETWEEN:"[10,0,10],[150,150,150]", rotate_y:P$altura * 60,y:P$altura} ADVANCE 1, 0 ENDWHILE STOP ENDPROCEDURE ;=========================== PROCEDURE PRE_RUN TIMEOUT agente.init, 0 TERMINATE_VE ENDPROCEDURE -
- + Crear y modificar
- + Season 6: Agentes y componentes
- + Entidad virtual persistente. El agente
En GPSS-Plus, una entidad virtual (VE) suele ser efímera: nace, ejecuta una serie de bloques, y termina. Sin embargo, algunos modelos requieren procesos permanentes que puedan actuar como controladores, gestores, o procesos pasivos que esperan órdenes. A estas VEs especiales las llamamos agentes.
Qué es un agente
Un agente es simplemente una entidad virtual que nunca termina su ejecución. Para ello, se inicializa con el bloque
TIMEOUT(fuera de los bloquesGENERATE), lo que hace que comience sin depender de ningún flujo de llegada.Una vez creada, el agente puede comportarse de dos formas principales:
-
Activa: ejecuta ciclos continuamente (por ejemplo, usando
ADVANCE) para revisar y tomar decisiones. Como un TIMER que es siempre la misma entidad. -
Pasiva: entra en espera con
HOLDy ahí permanecerá mientras no se le ordene hacer otra cosa.
Cómo se crea:
En el
PRE_RUNllamamos a suPROCEDUREinicializador:timeout agente1.main,0 ; Se ejecutará en el instante 0.
Que por convenio se llamará ".main".
Este PROCEDURE se encargará de almacenar en un SAVEVALUE su identificador para que cualquier entidad pueda acceder a ella y tras esto entrará en el bucle infinito con espera activa o pasiva:
PROCEDURE agente1.main SAVEVALUE nAgente1,D$N WHILE (1==1) ADVANCE 100 ... ; Acciones periódicas ENDWHILE TERMINATE_VE ; No se alcanzará nunca ENDPROCEDURE ;---------------------------------------- PROCEDURE agente2.main SAVEVALUE nAgente2,D$N HOLD HOLDER_AGENTES TERMINATE_VE ; No se alcanzará nunca ENDPROCEDUREY sus métodos o PROCEDURES asociados siguen la convención
agente.metodo, por ejemplo:procedure agente2.liberacion_total MOVE {NAME:INFO2, TEXT:"T= AC1$ Agente 2 liberando todo"} UNHOLD HOLDER1 UNHOLD HOLDER2 RETURN_RESTORE ; Vuelve exactamente a su estado anterior ENDPROCEDUREDonde lo más importante a destacar es su finalización especial:
RETURN_RESTOREEste bloque devulverá al agente a la misma situación en la que se encontraba al ser interrumpida mediante el
SIGNAL/SIGNALNOW.
Si estaba en unADVANCE, se reanuda con el tiempo restante ajustado.
Si estaba en una cola de un recurso, no se alterará su situación.Nótese que si se utilizase
RETURNoENDPROCEDURE, saltaría a la siguiente línea de código. Útil si se está en una espera activa y se quiere reiniciar el tiempo de actuación periódica.En el ejemplo:
Vemos a dos agentes de ambos tipos liberando entidades de dos HOLDERS de formas arbitrarias.
El segundo, cada 20 entidades que completan el recorrido, libera todas las atrapadas.
Example:
/* Entidad virtual persistente. El agente */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} START 100 ;===> Configuración de recursos y posiciones Restroom {NAME:Restroom1, X:337, Y:344} Restroom {NAME:Restroom2, X:337, Y:258} Restroom {NAME:Restroom_AGENTE2, X:567, Y:104} POSITION {NAME:ENTRADA, X:179, Y:301} POSITION {NAME:SALIDA, X:559, Y:299} GRAPHIC {NAME:INFO1, TYPE:TEXT, X:335, Y:178, TEXT:"Agente1"} GRAPHIC {NAME:INFO2, TYPE:TEXT, X:569, Y:62, TEXT:"Agente2"} INITIAL contador,0 ;***************************************************** ;===> Inicialización del agente PROCEDURE PRE_RUN timeout agente1.main,0 timeout agente2.main,0 TERMINATE_VE ENDPROCEDURE ;***************************************************** ;===> Flujo principal de las entidades GENERATE 15,5 {NAME:GEN1, X:50, Y:300} ADVANCE 10 {TO:ENTRADA} ASSIGN aleatorio, FLOOR(RANDOM * 2) + 1 IF (P$aleatorio==1) MOD {color:#990000} ADVANCE 10 {TO:Restroom1} REST Restroom1 ELSE MOD {color:#999900} ADVANCE 10 {TO:Restroom2} REST Restroom2 ENDIF ADVANCE 30,30 {TO:SALIDA} if (D$N %20 == 0) SIGNAL agente2.liberacion_total,X$nAgente2 endif ENDGENERATE 1 ;******************************* procedure agente2.main ; Asigna su nombre único como variable si hace falta SAVEVALUE nAgente2,D$N MOVE {NAME:INFO2, TEXT:"Agente 1 activo"} WHILE (1==1) ; inútil si siempre se usa RETURN_RESTORE REST Restroom_AGENTE2 ENDWHILE TERMINATE_VE ; No se alcanzará nunca ENDPROCEDURE ;******************************* procedure agente2.liberacion_total MOVE {NAME:INFO2, TEXT:"T= AC1$ Agente 2 liberando todo"} WAKE Restroom1 WAKE Restroom2 RETURN_RESTORE ENDPROCEDURE ;********************************** PROCEDURE agente1.main ; Asigna su nombre único como variable si hace falta SAVEVALUE nAgente1,D$N MOVE {NAME:INFO1, TEXT:"Agente 2 activo"} WHILE (1==1) ADVANCE 50 ; El agente revisa cada 50 unidades SAVEVALUE contador, X$contador + 1 MOVE {NAME:INFO1, TEXT:"Agente: X$contador"} IF (X$contador % 3==0) assign liberar,R$(Restroom1,IN) MOVE {NAME:INFO1, TEXT:"Liberando Restroom 1 (P$liberar DE R$(Restroom1,IN))"} WAKE Restroom1 ENDIF IF (X$contador % 5 ==0) assign liberar,round(R$(Restroom2,IN) * 2 / 3) MOVE {NAME:INFO1, TEXT:"Liberando Restroom 2 (P$liberar DE R$(Restroom2,IN))"} WAKE Restroom2,P$liberar ENDIF ENDWHILE TERMINATE_VE ; No se alcanzará nunca ENDPROCEDURE ;********************************** -
- + Agente como controlador
En este capítulo exploramos cómo un agente puede actuar como un controlador visual autónomo, que reacciona a los cambios de su entorno y produce efectos animados. Veremos un ejemplo típico: una puerta automática que se abre cuando detecta entidades cerca y se cierra cuando no hay nadie.
Idea base
El agente es una VE que no termina nunca y que ejecuta repetidamente una tarea: comprobar si hay entidades en una zona determinada (simulada con un
QUEUER) y mover la puerta en consecuencia.Este tipo de lógica es ideal para comportamientos animados, sensores, semáforos o cualquier objeto visual que actúe en base al entorno.
Example:
/* Agente como controlador */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Queuer {NAME:sensor,X:403,Y:575} POSITION {NAME:POS1,X:265,Y:454} POSITION {NAME:POS2,X:523,Y:449} POSITION {NAME:POS3,X:720,Y:450} Graphic {NAME:Line1,Type:LINE,color:#FF0000, X1:418,Y1:370,X2:413,Y2:383,X3:387,Y3:383,X4:381,Y4:370} Graphic {NAME:Line2,Type:LINE,color:#FF0000, X1:422,Y1:509,X2:414,Y2:486,X3:387,Y3:486,X4:382,Y4:508} Graphic {NAME:Text1,Type:TEXT,X:431,Y:262,Text:" "} initial nAgente,0 START 200 ;***************************************************** PROCEDURE PRE_RUN timeout agente.main,0 TERMINATE_VE ENDPROCEDURE 1 ;***************************************************** GENERATE 30,50 {NAME:GEN1,X:86,Y:450} ADVANCE 20,0 {TO:POS1} queue sensor ADVANCE 20,0 {TO:POS2} depart sensor ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 ;******************************* procedure agente.main savevalue nAgente,D$N assign usuarios,0 assign estado,100 assign posY2,GD$(Line1,Y2) while (1==1) advance 1 call agente.moverPuerta endwhile terminate_ve endprocedure procedure agente.moverPuerta IF (R$(sensor,IN)<=0) assign estado,P$estado + 5 assign estado,MIN(100,P$estado) else assign estado,P$estado -5 assign estado,MAX(10,P$estado) ENDIF move {name:Line1,Y2:P$estado + P$posY2,Y3:P$estado + P$posY2} ;move {name:Text1,TEXT:"p$usuarios P$estado | P$posY1"} endprocedure - + SIGNAL Vs SIGNALNOW
En este capítulo vamos a desgranar el funcionamiento conjunto de la cola de eventos y la pila de contexto (stack) dentro de GPSS-Plus, y cómo esto afecta a los comportamientos asíncronos con
SIGNALy síncronos conSIGNALNOW.La cola de eventos
Cuando una entidad ejecuta un bloque
ADVANCE, pasa a la cola de eventos, que se ordena cronológicamente. En caso de coincidencia de tiempo, la entidad que entra primero tendrá prioridad (FIFO).
Esta cola contiene solo tres datos por elemento:- Tiempo de ejecución
- Referencia a la entidad
- Tipo de elemento
El stack de contexto
Cada entidad dispone de un stack privado, una pila de contexto que permite reanudar su ejecución tras un salto (
CALL,FOREACH, etc.).
Este stack es LIFO: el último contexto en entrar es el primero en salir.En llamadas
SIGNALoSIGNALNOWa otras entidades (agentes), se guarda en esta pila el estado de ejecución actual, para que pueda retomarse tras la llamada.¿Qué sucede con
SIGNAL?SIGNALes asíncrono. La entidad que lo emite no se detiene: simplemente agenda la ejecución de un procedimiento en otro agente/entidad.Si enviamos tres
SIGNALseguidos al mismo agente:SIGNAL agente.suma2,X$nAgente SIGNAL agente.multiplica10,X$nAgente SIGNAL agente.suma4,X$nAgente
la entidad emisora seguirá su camino, pero el agente receptor quedará planificado tres veces en la cola de eventos.
Cuando el agente tome el control, usará su stack para ejecutar los procedimientos pendientes. Pero al ser una pila LIFO, ejecutará en orden inverso al deseado:
(((0 + 4) * 10) + 2) = 42
¿Qué pasa con
SIGNALNOW?SIGNALNOWes síncrono. Detiene temporalmente la entidad que lo invoca, ejecuta inmediatamente al agente y luego la entidad continúa.SIGNALNOW agente.suma2,X$nAgente SIGNALNOW agente.multiplica10,X$nAgente SIGNALNOW agente.suma4,X$nAgente
Aquí, las llamadas se ejecutan en el orden escrito, porque se intercalan correctamente:
(((0 + 2) * 10) + 4) = 24
Ejemplo en acción
Este modelo define un agente con tres métodos (
suma2,multiplica10,suma4). Dos entidades lo invocan: una usandoSIGNALy otra conSIGNALNOW. En pantalla se puede ver la diferencia en el resultado.En el caso de
SIGNAL, se observa que inicialmente el resultado sigue siendo 0 puesto que losSIGNALno se han ejecutado. Basta unADVANCE 0(la entidad se vuelve a programar en la cola de eventos) para que los agentes se ejecuten y tras ello, el resultado está disponible.
Example:
/* SIGNAL Vs SIGNALNOW */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Restroom {NAME:RestroomAgentes,X:252,Y:60,visible:1} POSITION {NAME:POS1,X:552,Y:194} POSITION {NAME:POS2,X:552,Y:394} Graphic {NAME:Text1,Type:TEXT,X:313,Y:252,Text:"Entidad"} Graphic {NAME:Text2,Type:TEXT,X:313,Y:232,Text:"Entidad"} Graphic {NAME:Text3,Type:TEXT,X:326,Y:444,Text:"Entidad"} Graphic {NAME:TextAgente,Type:TEXT,X:311,Y:325,Text:"---",color:#ff3333} initial nAgente,0 START 2 ;***************************************************** PROCEDURE PRE_RUN timeout agente.main,0 TERMINATE_VE ENDPROCEDURE 1 ;***************************************************** GENERATE 10,0,0,1 {NAME:GEN1,X:100,Y:200} assign resultado,0,X$nAgente SIGNAL agente.suma2,X$nAgente SIGNAL agente.multiplica10,X$nAgente SIGNAL agente.suma4,X$nAgente move {name:Text1,TEXT:"SIGNAL Previo: P$(resultado,X$nAgente)"} advance 0 move {name:Text2,TEXT:"SIGNAL Resultado: P$(resultado,X$nAgente)"} ADVANCE 20,0 {TO:POS1} ENDGENERATE 1 GENERATE 60,0,0,1 {NAME:GEN2,X:100,Y:400} assign resultado,0,X$nAgente SIGNALNOW agente.suma2,X$nAgente SIGNALNOW agente.multiplica10,X$nAgente SIGNALNOW agente.suma4,X$nAgente move {name:Text3,TEXT:"SIGNALNOW Resultado: P$(resultado,X$nAgente)"} ADVANCE 20,60 {TO:POS2} ENDGENERATE 1 ;******************************* procedure agente.main savevalue nAgente,D$N assign resultado,0 REST RestroomAgentes terminate_ve endprocedure procedure agente.suma2 assign resultado,P$resultado + 2 move {name:TextAgente,TEXT:"ResultadoSUMA2: P$resultado T= AC1$"} RETURN_RESTORE endprocedure procedure agente.suma4 assign resultado,P$resultado + 4 move {name:TextAgente,TEXT:"ResultadoSUMA4: P$resultado T= AC1$"} RETURN_RESTORE endprocedure procedure agente.multiplica10 assign resultado,P$resultado * 10 move {name:TextAgente,TEXT:"Resultadomultiplica10: P$resultado T= AC1$"} RETURN_RESTORE endprocedure - + Colas de mensajes
Vamos a ver un código con una narrativa compleja pero cuya realización resulta natural en GPSS-Plus gracias a sus primitivas para agentes, listas de tareas y sincronización por eventos.
El ejemplo simula un restaurante simplificado: los clientes llegan, ocupan una mesa, piden una comanda y esperan a ser servidos. Los cocineros (agentes) despiertan si estaban dormidos, toman una comanda de una lista compartida, y generan entidades "plato" para cada tarea. Cuando todos los platos de un cliente están listos, este puede empezar a comer.
Toda la coordinación se resuelve con una lista FIFO de tareas (
SAVEVALUE.push/pop) y unRESTROOMcomún que regula el sueño y despertar de los agentes.
No se necesitaSIGNAL, niON_QUEUE, niON_RELEASEy, sin embargo, todo fluye perfectamente.Este modelo muestra cómo los agentes pueden autogestionar su agenda sin interrupciones externas, simplemente leyendo una cola de trabajo compartida.
Aquí, el
RESTROOMfunciona como una cerradura de sueño: el primero que se despierte atiende, los demás esperan.
Example:
/* Colas de mensajes */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} START 1000 Facility {NAME:mesas,X:221,Y:60,capacity:7} Restroom {NAME:esperaServir,X:323,Y:60} Restroom {NAME:agentesDormidos,X:348,Y:357} POSITION {NAME:COMIENDO, X:579, Y:46} GRAPHIC {NAME:INFOA_1, TYPE:TEXT, X:149, Y:296, TEXT:"Agente1 listo"} GRAPHIC {NAME:INFOB_1, TYPE:TEXT, X:147, Y:237, TEXT:"infoB1"} GRAPHIC {NAME:INFOC_1, TYPE:TEXT, X:147, Y:268, TEXT:"infoC1"} GRAPHIC {NAME:INFOA_2, TYPE:TEXT, X:577, Y:292, TEXT:"Agente2 listo"} GRAPHIC {NAME:INFOB_2, TYPE:TEXT, X:576, Y:238, TEXT:"infoB2"} GRAPHIC {NAME:INFOC_2, TYPE:TEXT, X:576, Y:266, TEXT:"infoC2"} Graphic {NAME:TextComanda,Type:TEXT,X:270,Y:132,Text:"Comanda"} Graphic {NAME:TextA,Type:TEXT,X:271,Y:102,Text:"Sin servir"} Graphic {NAME:TextB,Type:TEXT,X:469,Y:84,Text:"Comiendo"} ;-------------------------------- ; CLIENTES ;-------------------------------- GENERATE 8,5,0,8 {NAME:Clientes, X:53, Y:61} ADVANCE 3 {TO:mesas,FLOW:1} seize mesas call anadir_comanda rest esperaServir ADVANCE 120,30 {FROM:esperaServir,TO:COMIENDO,FLOW:1} ; comiendo release mesas if (R$(mesas,IN)<=0) stop endif ENDGENERATE 1 ;********************************** procedure anadir_comanda ASSIGN cHorno, FLOOR(RANDOM * 4) ASSIGN cFogon, FLOOR(RANDOM * 6) ASSIGN cFreidora, FLOOR(RANDOM * 3) ASSIGN nPlatosPendientes, P$cHorno + P$cFogon + P$cFreidora savevalue.push comandas, [1,D$N,P$cHorno,P$cFogon,P$cFreidora] ; Añade comanda MOVE {name:TextComanda,text:"Horno: P$cHorno ; Fogon: P$cFogon ; Freidora: P$cFreidora"} ; avisamos a cocina despertando a todos, el primero que llegue atenderá la comanda ; el segundo volverá a dormirse wake agentesDormidos ENDPROCEDURE ;-------------------------------- ; COCINEROS / AGENTES ;-------------------------------- PROCEDURE PRE_RUN timeout agente.main,0,1 ; agente 1 timeout agente.main,0,2 ; agente 2 TERMINATE_VE ENDPROCEDURE procedure agente.main ; Asigna su nombre único como variable if (P$PARAM_A==1) savevalue nAgente1,D$N assign nAgente,1 else savevalue nAgente2,D$N assign nAgente,2 endif MOVE {NAME:"INFOA_P$nAgente", TEXT:"Agente activo P$PARAM_A"} savevalue comandas, [] assign tareaEnCurso,0 WHILE (1==1) if (VD$(comandas,LENGTH)<=0) ; Si no hay tareas, duerme (espera que un cliente lo despierte) MOVE {NAME:"INFOA_P$nAgente", TEXT:"T: AC1$ Cocinero P$nAgente : DURMIENDO...", color:red} rest agentesDormidos endif assign nTareas,VD$(comandas,LENGTH) MOVE {NAME:"INFOA_P$nAgente", TEXT:"Cocinero: tengo P$nTareas tareas, Despierto", color:green} savevalue.pop comandas,comanda assign tareaEnCurso,P$(comanda.0) assign nEntidad,P$(comanda.1) assign cHorno,P$(comanda.2) assign cFogon,P$(comanda.3) assign cFreidora,P$(comanda.4) if (P$tareaEnCurso > 0) MOVE {NAME:"INFOB_P$nAgente", TEXT:"Tengo P$nTareas tareas, ejecuto la Cliente P$nEntidad"} MOVE {NAME:"INFOC_P$nAgente", TEXT:"Horno: P$cHorno ; Fogon: P$cFogon ; Freidora: P$cFreidora"} assign contador,0 while (P$contador - + Gestión de entidades
En este capítulo exploramos cómo un agente puede encargarse de monitorizar el paso de entidades por una zona del modelo y calcular métricas globales como el tiempo total de uso o la media de permanencia.
El agente no actúa directamente sobre las entidades, sino que escucha eventos generados automáticamente por un QUEUER (a través de sus
ON_QUEUEyON_DEPART), y en base a esos eventos, registra cuándo entran y salen las entidades.Para ello, el agente mantiene una estructura de datos (array asociativo) donde guarda los tiempos de entrada, y luego calcula las diferencias al salir. De esta manera, puede mantener un seguimiento completo sin interferir en el flujo lógico del resto del modelo.
Este tipo de lógica es útil para implementar estadísticas personalizadas, auditoría de uso, alertas o cualquier control que dependa de eventos externos y del historial de entidades.
Example:
/* Gestión de entidades */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Restroom {NAME:RestroomAgentes,X:100,Y:121,visible:1} queuer {NAME:Queuer1,X:321,Y:123,on_queue:Queuer1on_queue,on_depart:Queuer1on_depart} POSITION {NAME:POS1,X:251,Y:335} POSITION {NAME:POS2,X:469,Y:341} Graphic {NAME:Text1,Type:TEXT,X:425,Y:514,Text:"Entidad"} Graphic {NAME:TextAgente1,Type:TEXT,X:433,Y:462,Text:"---"} Graphic {NAME:TextAgente2,Type:TEXT,X:433,Y:416,Text:"---"} initial nAgente,0 START 500 ;***************************************************** PROCEDURE PRE_RUN timeout agente.main,0 TERMINATE_VE ENDPROCEDURE 1 ;***************************************************** GENERATE 10,0 {NAME:GEN1,X:43,Y:300} move {name:Text1,TEXT:"Entidad Resultado P$(resultado,X$nAgente) AC1$"} ADVANCE 20,0 {TO:POS1} queue Queuer1 ADVANCE 20,60 {TO:POS2} depart Queuer1 ENDGENERATE 1 ;******************************* procedure agente.main savevalue nAgente,D$N assign datos,{} assign resultado,0 assign media,0 assign nEntidades,0 assign tiempoTotal,0 while (1==1) REST RestroomAgentes endwhile terminate_ve endprocedure ;********************************** procedure agente.IN assign datos.entidad_P$PARAM_A,P$PARAM_B move {name:TextAgente1,TEXT:"IN Entidad P$PARAM_A : Tiempo Inicio: P$(datos.entidad_P$PARAM_A)"} RETURN_RESTORE endprocedure ;********************************** procedure agente.OUT assign nEntidades,P$nEntidades + 1 assign tiempoInicio,P$(datos.entidad_P$PARAM_A) assign tiempoFin,P$PARAM_B assign tiempoTotal,P$tiempoTotal + P$tiempoFin - P$tiempoInicio assign media,P$tiempoTotal / P$nEntidades move {name:TextAgente2,TEXT:"OUT Entidad: P$PARAM_A Tiempo Total: P$tiempoTotal Media: P$media"} ASSIGN.DELETE datos,entidad_P$PARAM_A ; eliminamos la entrada de la lista RETURN_RESTORE endprocedure procedure Queuer1on_queue SIGNAL agente.IN,X$nAgente,P$ENTITYNUMBER,AC1$ TERMINATE_VE endprocedure procedure Queuer1on_depart SIGNAL agente.OUT,X$nAgente,P$ENTITYNUMBER,AC1$ TERMINATE_VE endprocedure - + Gestor de recursos
En este capítulo presentamos un agente que actúa como gestor inteligente de un recurso compartido: un semáforo.
El objetivo es permitir el paso de entidades desde distintos orígenes hacia distintos destinos, pero solo uno a la vez, de forma controlada. Se simula así un cruce en el que el semáforo cambia de dirección cada cierto tiempo, desbloqueando una de las cuatro posibles trayectorias.
Estructura general:
-
Un
INITIALdefine la tablatramos, que contiene la información de cada dirección (nombres de posiciones, holders, colores, etc.). -
Las entidades que circulan pasan por un
HOLDERsi su dirección no está activa, y continúan si está permitida. -
El agente
agenteSemaforo.mainse encarga de:-
Apagar el semáforo actual (
red) -
Elegir aleatoriamente el siguiente (
green) -
Actualizar el texto y los colores
-
Hacer
UNHOLDa las entidades en espera para ese tramo
-
Aprendizaje clave:
El agente actúa como planificador visual y operativo, y permite entender cómo un loop de trabajo constante puede gobernar múltiples entidades, simplemente ajustando cuándo se permite continuar y cuándo no.
Este patrón es útil para gestionar accesos a zonas exclusivas, turnos de paso, recursos únicos o flujos alternantes.
Example:
/* Gestor de recursos */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} INITIAL tramos, [ { tiempo: 10, color: "#009900", nInicio: "InicioN", nFin: "FinN", nCentro: "CentroN", nRestroom: "RestroomN", nSemaforo: "SemaforoN", nTexto: "TextN" }, { tiempo: 20, color: "#FF0099", nInicio: "InicioS", nFin: "FinS", nCentro: "CentroS", nRestroom: "RestroomS", nSemaforo: "SemaforoS", nTexto: "TextS" }, { tiempo: 30, color: "#000099", nInicio: "InicioE", nFin: "FinE", nCentro: "CentroE", nRestroom: "RestroomE", nSemaforo: "SemaforoE", nTexto: "TextE" }, { tiempo: 40, color: "#0099FF", nInicio: "InicioO", nFin: "FinO", nCentro: "CentroO", nRestroom: "RestroomO", nSemaforo: "SemaforoO", nTexto: "TextO" } ] POSITION {NAME:InicioN,X:368,Y:541} POSITION {NAME:InicioS,X:393,Y:30} POSITION {NAME:InicioE,X:756,Y:270} POSITION {NAME:InicioO,X:41,Y:269} POSITION {NAME:FinN,X:398,Y:540} POSITION {NAME:FinS,X:416,Y:31} POSITION {NAME:FinE,X:754,Y:298} POSITION {NAME:FinO,X:40,Y:301} POSITION {NAME:CentroN,X:381,Y:347} POSITION {NAME:CentroS,X:393,Y:249} POSITION {NAME:CentroE,X:447,Y:294} POSITION {NAME:CentroO,X:325,Y:290} Graphic {NAME:SemaforoN,TYPE:ARC,X:413,Y:346,FCOLOR:"red",RADIUS:16,START_ANGLE:0,END_ANGLE:360,CLOSE:1} Graphic {NAME:SemaforoS,TYPE:ARC,X:363,Y:246,FCOLOR:"red",RADIUS:16,START_ANGLE:0,END_ANGLE:360,CLOSE:1} Graphic {NAME:SemaforoE,TYPE:ARC,X:453,Y:263,FCOLOR:"red",RADIUS:16,START_ANGLE:0,END_ANGLE:360,CLOSE:1} Graphic {NAME:SemaforoO,TYPE:ARC,X:326,Y:320,FCOLOR:red,RADIUS:16,START_ANGLE:0,END_ANGLE:360,CLOSE:1} Restroom {NAME:RestroomN,X:713,Y:570,on_rest:actualiza} Restroom {NAME:RestroomS,X:713,Y:473,on_rest:actualiza} Restroom {NAME:RestroomE,X:713,Y:521,on_rest:actualiza} Restroom {NAME:RestroomO,X:713,Y:422,on_rest:actualiza} Graphic {NAME:TextN,Type:TEXT,X:412,Y:347,Text:"N",font:"18px",color:#ffffff} Graphic {NAME:TextS,Type:TEXT,X:363,Y:247,Text:"S",font:"18px",color:#ffffff} Graphic {NAME:TextE,Type:TEXT,X:453,Y:263,Text:"E",font:"18px",color:#ffffff} Graphic {NAME:TextO,Type:TEXT,X:326,Y:320,Text:"O",font:"18px",color:#ffffff} Graphic {NAME:textSem,Type:TEXT,X:165,Y:381,Text:"Semaforo",font:"18px",color:#000000} START 3000 ;----------------------------- PROCEDURE PRINCIPAL DE MOVIMIENTO procedure toSemaforo ; P$(PARAM_A) = origen, P$PARAM_B = destino ADVANCE X$(tramos.P$(PARAM_A).tiempo),10 {from:X$(tramos.P$(PARAM_A).nInicio), to:X$(tramos.P$PARAM_A.nCentro)} if (X$semaforoAbierto!=P$PARAM_A) rest X$(tramos.P$(PARAM_A).nRestroom) endif ADVANCE 10,3 {to:X$(tramos.P$PARAM_B.nCentro)} ADVANCE X$(tramos.P$(PARAM_B).tiempo),10 {to:X$(tramos.P$(PARAM_B).nFin)} endprocedure ;----------------------------- AGENTE SEMÁFORO procedure agenteSemaforo.main savevalue semaforoAbierto,0 while (1==1) savevalue semaforoAbiertoAnterior, X$semaforoAbierto move {name:X$(tramos.X$(semaforoAbierto).nSemaforo),FCOLOR:yellow} savevalue semaforoAbierto,-1 advance 50 call calcularDestino,X$semaforoAbiertoAnterior move {name:X$(tramos.X$(semaforoAbiertoAnterior).nSemaforo),FCOLOR:red} savevalue semaforoAbierto,P$calcularDestino move {name:textSem,text:"Semaforo Abierto: X$semaforoAbierto"} move {name:X$(tramos.X$(semaforoAbierto).nSemaforo),FCOLOR:green} wake X$(tramos.X$(semaforoAbierto).nRestroom) advance 200 endwhile endprocedure ;----------------------------- PROCEDURE PARA CAMBIAR DESTINO procedure calcularDestino ; P$PARAM_A origen assign tmp, (P$PARAM_A + 1 + floor(random*3)) % 4 endprocedure P$tmp ;----------------------------- ACTUALIZACIÓN DE VALORES EN PANTALLA procedure actualiza move {name:X$(tramos.0.nTexto),text:"R$(X$(tramos.0.nRestroom),IN)"} move {name:X$(tramos.1.nTexto),text:"R$(X$(tramos.1.nRestroom),IN)"} move {name:X$(tramos.2.nTexto),text:"R$(X$(tramos.2.nRestroom),IN)"} move {name:X$(tramos.3.nTexto),text:"R$(X$(tramos.3.nRestroom),IN)"} terminate endprocedure ;----------------------------- GENERADOR ÚNICO GENERATE 10,5 {NAME:GEN,X:577,Y:575,ERADIO:10} assign origen,floor(random*4) mod {color:X$(tramos.P$origen.color)} call calcularDestino,P$origen call toSemaforo,P$origen,P$calcularDestino ENDGENERATE 1 ;----------------------------- ARRANQUE DEL AGENTE PROCEDURE PRE_RUN TIMEOUT agenteSemaforo.main, 0 TERMINATE_VE ENDPROCEDURE -
- + Entidad Componente
En un motor de simulación por eventos discreto, una entidad suele ser un único hilo de ejecución: un flujo secuencial que avanza bloqueándose y reanudándose según el modelo.
Este enfoque funciona, pero no coincide con el comportamiento real de muchas situaciones.
Una persona que espera en la cola del autobús no solo espera:
respira, consulta el móvil, piensa, se distrae y puede cambiar de opinión.Un vehículo que se desplaza también actúa en paralelo:
consume energía, se desgasta, recibe señales, ajusta su ruta.Modelar todo esto con un único flujo lineal es una simplificación excesiva.
Entidades componente: simultaneidad dentro de la entidad
Por lo tanto, vamos a ampliar la forma en la que podemos ver una entidad para que pueda tener varias funciones en paralelo.
Una entidad componente es una entidad virtual que ejecuta una función en nombre de otra entidad principal.
Su existencia depende de la entidad principal, pero tiene su propio flujo de ejecución.Esto permite que una entidad principal tenga varios comportamientos activos simultáneamente, cada uno representado por una entidad componente independiente.
Características clave:
-
La entidad componente se crea cuando nace la entidad principal.
-
Ejecuta su lógica en paralelo, sin bloquear el flujo principal.
-
Puede leer y modificar atributos de la entidad principal.
-
Puede despertarla, cambiar su estado o provocar decisiones.
-
Finaliza automáticamente cuando la entidad principal deja de existir.
No es un “hijo” en sentido POO, ni un objeto, ni una propiedad.
Es un comportamiento vivo, modelado como entidad.La cola de eventos sigue siendo estrictamente secuencial, pero ahora la entidad deja de ser monolítica: ya no representa un único flujo sino un pequeño sistema compuesto por varias entidades cooperando y modelando más profundamente a la entidad principal.
Esto permite modelar fenómenos naturales de simultaneidad sin recurrir a hilos, semáforos ni programación externa.
Ciclo de vida de una entidad componente
El funcionamiento es sencillo y uniforme:
-
La entidad principal nace.
-
Inmediatamente se crea una entidad componente indicandole el número de la entidad principal.
-
La entidad componente ejecuta su lógica en bucle WHILE:
D$(EXIST,P$idEntidadPrincipal) == 1 -
Puede influir en la entidad principal asignándole valores, modificando su estado o despertándola.
-
Cuando la entidad principal desaparece, el componente termina automáticamente.
Así se definen comportamientos paralelos naturales, como respiración, desgaste, decisiones internas, sensores activos o distracciones.
En el ejemplo vemos a personas que llegan a una parada de autobús muy simplificado. Cuando llegan a 6, simplemente se van y mientras se encuentran en
RESTfuera de la cola de eventos.Pero las entidades también están leyendo el móvil y algunos pueden decidir dejar la cola e irse con urgencia.
Cuando la entidad componente decide que hay que abandonar la cola, ejecuta lo necesario mientras la principal está aun dormida en el
RESTROOM.
Example:
/* Componente */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;SYSTEM {TYPE:OPTIONS,Speed:8} Restroom {NAME:Restroom_autobus,X:333,Y:282} POSITION {NAME:SALIDA_URGENTE,X:335,Y:119} POSITION {NAME:SALIDA,X:615,Y:286,type:terminate,title:end} Graphic {NAME:textAgente,Type:TEXT,X:494,Y:336,Text:"Grupo"} Graphic {NAME:Text2,Type:TEXT,X:331,Y:76,Text:"Urgencia"} START 500 ;***************************************************** PROCEDURE PRE_RUN timeout verifica_cola,1 TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 10,0,0,0 {NAME:GEN1,X:61,Y:288} ASSIGN salidaUrgente,0 timeout componente_mirar_movil,0,D$N ADVANCE 20,0 {TO:Restroom_autobus} REST Restroom_autobus if (P$salidaUrgente == 1) ADVANCE 20,10 {TO:SALIDA_URGENTE} else ADVANCE 20,10 {TO:SALIDA} endif ENDGENERATE 1 ;******************************* procedure verifica_cola while (1==1) advance 5 if (R$(Restroom_autobus,OCCUPIED) > 5) move {name:textAgente,text:"Liberando [AC1: AC1$]"} WAKE Restroom_autobus ; todos salen endif endwhile endprocedure ;********************************** procedure componente_mirar_movil assign miEntidad,P$PARAM_A while (D$(EXIST,P$miEntidad)==1) advance 5 if (R$(Restroom_autobus,IS_OCCUPIED_BY,P$miEntidad) == 1 && RANDOM < 0.02) move {name:Text2,text:"Liberando la entidad P$miEntidad [AC1: AC1$]"} assign salidaUrgente,1,P$miEntidad mod {number:P$miEntidad, color:red} WAKE Restroom_autobus,-1,P$miEntidad ; sale solo esta entidad endif endwhile terminate_ve endprocedure ;********************************** -
- + Entidad virtual persistente. El agente
- + Season 7: Contextos (CX$) y módulos (.mod)
- + Creación de recursos dinámicos 1
Antes de comenzar a ver los contextos debemos tener en cuenta cierta característica de GPSS-Plus.
En general, los motores basados en Drag&drop los recursos se arrastran fácilmente sobre el canvas y ya están listos para usar. En GPSS-Plus hemos visto que es diferente, hay que escribir el código del COMANDO.
Por contra, esa característica de los Drag&drop hace muy complicada la creación en tiempo de ejecución de un recurso. No estamos ahí para arrastrarlo al canvas. En GPSS-Plus basta con cambiar el COMANDO
FACILITYpor el BLOQUENEWFACILITY.Solo se exige que esté creado antes de ser usado y para eso se suele hacer con el
PRE_RUN.
Example:
/* Contextos y módulos. Creación dinámica 1 */ SYSTEM {TYPE:OPTIONS, SPEED:5} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Position {NAME:pos_exit,X:581,Y:407} ; --- Facility definido de forma clásica --- FACILITY {NAME:resource_static, CAPACITY:1, X:496, Y:164} START 200 PROCEDURE PRE_RUN ; Crear un segundo facility dinámico en el arranque NEWFACILITY {NAME:resource_dynamic, CAPACITY:1, X:300, Y:400} TERMINATE_VE ENDPROCEDURE ;------------------------------------------------------ ; --- Flujo de entidades --- GENERATE 10,0 {NAME:GEN1} ; cada 10 ticks una entidad advance 15 {to:resource_static} SEIZE resource_static ADVANCE 15 RELEASE resource_static advance 15 {to:resource_dynamic} SEIZE resource_dynamic ADVANCE 17 RELEASE resource_dynamic advance 15 {to:pos_exit} TERMINATE 1 - + Creación de recursos dinámicos 2
Ahora que ya sabemos que se pueden crear en runtime, veamos su utilidad... la más evidente, la de crear multitud con un iterador.
Solo debemos tener en cuenta qué nombre les hemos puesto para poder usarlos.
En GPSS‑Plus, los nombres de recursos son strings reales, por lo que pueden construirse dinámicamente y usarse directamente en SEIZE, RELEASE, R$(), etc.
Example:
SYSTEM {TYPE:OPTIONS, SPEED:5} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Position {NAME:POS1,X:147,Y:311} Position {NAME:POS2,X:542,Y:327} Position {NAME:POS3,X:756,Y:322} Graphic {NAME:Text1,Type:TEXT,X:305,Y:571,Text:"Hello"} ; --- Facility definido de forma clásica --- FACILITY {NAME:f_static, CAPACITY:4, X:657, Y:325,color:blue} START 200 PROCEDURE PRE_RUN ; Crear un segundo facility dinámico en el arranque assign t,0 while (P$t < 5) assign t,P$t+1 assign pos_y,(P$t * 80 + 20) assign nombre,"f_dynamic_P$t" NEWFACILITY {NAME:P$nombre, CAPACITY:1, X:300, Y:(P$pos_y)} NEWPOSITION {NAME:pos_P$nombre, X:200, Y:(P$pos_y)} endwhile TERMINATE_VE ENDPROCEDURE ;------------------------------------------------------ ; --- Flujo de entidades --- GENERATE 6,0 {NAME:GEN1,x:58,y:310} advance 15,0 {to:POS1,flow:1} ASSIGN MINKEY,0 ASSIGN MINVAL,100000 assign t,0 while (P$t < 5) assign t,P$t+1 assign nombre,"f_dynamic_P$t" if (R$(P$nombre,QUEUE) < P$MINVAL) ASSIGN MINKEY,P$t ASSIGN MINVAL,R$(P$nombre,QUEUE) endif endwhile assign siguiente_recurso,"f_dynamic_P$MINKEY" move {name:Text1,text:"Consulta entidad D$N: P$(siguiente_recurso) Cola: R$(P$siguiente_recurso,QUEUE)"} advance 15,0 {to:"pos_P$siguiente_recurso",flow:1,DECISION:"inicio"} advance 15,0 {to:"P$siguiente_recurso",flow:1} SEIZE P$siguiente_recurso ADVANCE 25,15 RELEASE P$siguiente_recurso advance 15 {to:POS2,flow:1,MERGE:"salida"} advance 15 {to:f_static,flow:1} SEIZE f_static ADVANCE 7,8 RELEASE f_static advance 15 {to:POS3,flow:1} TERMINATE 1 - + Creación de recursos dinámicos 3
Y por último, también se pueden crear si surge la necesidad.
Solo hay que tener en cuenta que un recurso no se puede modificar, si se crea, solo puede bloquearse con el bloque
LOCK.
Example:
/* Contextos y módulos. Creación dinámica 3 */ SYSTEM {TYPE:OPTIONS, SPEED:5} Position {NAME:pos_exit,X:581,Y:407} ; --- Facility definido de forma clásica --- FACILITY {NAME:resource_static, CAPACITY:1, X:496, Y:164} START 200 ;------------------------------------------------------ ; --- Flujo de entidades --- GENERATE 10,0 {NAME:GEN1} advance 15 {to:resource_static} SEIZE resource_static ADVANCE 15 RELEASE resource_static if (R$(resource_dynamic,EXIST)==0) NEWFACILITY {NAME:resource_dynamic, CAPACITY:1, X:300, Y:400} endif advance 15 {to:resource_dynamic} SEIZE resource_dynamic ADVANCE 17 RELEASE resource_dynamic advance 15 {to:pos_exit} TERMINATE 1 - + Reutilización del código. CX$
Seguro que a estas alturas te habrás dado cuenta de lo que puede suponer hacer una lógica que simule un taller completo.
Y nos podemos volver locos si nos dicen que son dos talleres. Y luego 10.Parece que ahí deberíamos abandonar, pero no, para eso están los contextos de GPSS-Plus.
No son clases porque en este entorno de eventos discretos no tiene sentido como tal, pero veremos que se les parecen y mucho. Es más un espacio de nombres y aquí todo es mucho más simple.Imaginemos un caso algo más trivial, un gráfico de un nivel de un depósito.
Ponemos las líneas, los colores y el texto y después queremos usarlo.
Ahí empiezan los problemas, que ese objeto, clase, dibujo, elemento o el nombre que quieras darle tiene tan incrustados los parámetros que resulta abrumador trabajar con él.
Y no solo eso, sino que si tenemos dos depósitos, el trabajo no es solo el doble sino que hay que ir con mucho cuidado de no pisar la variables y crear tantasLINEcomo sean necesarias.Este es el problema que vamos a resolver.
Por analogía se parecerá a decir que es a través de clases con métodos, variables locales e instanciaciones, pero no es así. Se resolverá con una simple variable tipo string.
Hasta ahora, para mover un gráfico podríamos hacer:
CALL grafico_set,75
Y si nuestro
procedureestaba correcto, redibujaría cierto gráfico para mostrar ese 75% de llenado.
Gráficos que previamente debíamos haber creado.Ahora vamos a hacerlo diferente y de tal forma que todo lo que vamos a ver se podrá llevar a otro fichero que no nos moleste más y llamarlo con un
INCLUDE.Lo primero: crear un método descriptivo
Si nuestro objeto es un depósito, crearemos un procedure llamado:
PROCEDURE deposito.init
Este procedure va a ser invocado, normalmente, por una
EVdesde elPRE_RUN/CALLy se va a encargar de crear todo el gráfico en lugar de conCOMANDOS GRAPHIC, con bloquesNEWGRAPHIC.Como todas las llamadas, podrán tener sus parámetros para ser ejecutado, por ejemplo:
call deposito.init, 20, 130,120, 100,"Carga","#ff0000"
...donde
deposito.inites el procedure y el resto son: ancho, alto, X, Y, nombre y color. También se puede hacer más cómodamente definiendo previamente un objeto con todas las características.Y con esto podemos empezar a pintar nuestro depósito en base a esos parámetros:
NEWGRAPHIC { NAME:TextoNivel, GROUP:Deposito, TYPE:TEXT, X:0, Y:0, TEXT:"Nivel: 0% ", COLOR:#000000 }Y así todo lo que queramos añadir a nuestro gráfico.
Después, solo tenemos que añadir algún método para gestionarlo:
PROCEDURE deposito.move MOVE {NAME:Deposito, x:P$PARAM_A, y:P$PARAM_B} ENDPROCEDURECon esto tendremos un gráfico... ¡pero solo uno!
Ese es el problema.
La solución viene de algo que hemos dicho referente al punto de separación en el nombre del procedure.
Para llamar a este procedure
initolocatepodemos llamarlo de tantas formas como instanciaciones queramos:CALL aaa.deposito.init, 20, 130,120, 100,"Carga","#ff0000" CALL bbb.deposito.init, 20, 80,420, 100,"Nivel","#ffff00" CALL ccc.deposito.init, 20, 180,320, 100,"Nivel","#ff00ff" ... CALL aaa.deposito.locate,100,200 CALL bbb.deposito.locate,200,100 CALL ccc.deposito.locate,300,200
Lo que hacemos es ponerle otro punto de separación al nombre de la instancia de ese objeto.
Y a partir de aquí debemos introducir el punto crítico: el valor del string de contexto
CX$Llamar a este procedure
"aaa.deposito.locate"significa que:-
El nombre real del procedure es
"deposito.locate" -
El contexto (
CX$) es el string"aaa"
Y hay que tenerlo muy claro y muy presente.
Cuando entre una entidad en un
PROCEDUREcuya llamada esté hecha con puntos de separación, se ejecutará la actividad bajo ese valor deCX$.Y con esto es suficiente para no pisar variables ni recursos entre unas instancias y otras.
Por ejemplo:
SAVEVALUE CX$_altura , 100
...realmente habrá creado:
SAVEVALUE aaa_altura , 100
O:
NEWGRAPHIC {NAME:CX$_Deposito, TYPE:GROUP, X:0, Y:0}...será realmente:
NEWGRAPHIC {NAME:aaa_Deposito, TYPE:GROUP, X:0, Y:0}Por lo tanto, se habrán generado tantos
SAVEVALUE,ASSIGN,NEWGRAPHIC,NEWRESTROOMcomo formas de llamar a losinitde cada clase.Así que solo tendremos que renombrar nuestros
ASSIGNs internos ySAVEVALUEs yNAMEs.... añadiéndoles delante"CX$_"
Y cuando queramos acceder a esos mismos parámetros deberemos hacerlo usando paréntesis para seguir evitando un anidamiento indeseado.Por ejemplo:
savevalue CX$_ALTO, 100
...se recupera con el
SNA:X$(CX$_ALTO)
Y con esto, podremos crear y mover tantas instancias de depósitos como queramos
Todo este material lo introducimos en un fichero separado y lo llamamos desde un
include.Resumen de conceptos clave de esta técnica:
La separación con puntos en un CALL del tipo aaa.bbb.ccc se interpreta así:
- El contexto (CX$) es "aaa"
- El nombre real del procedure ejecutado es bbb.ccc
- CX$ es un SNA clave que representa el contexto de llamada actual y puede usarse para construir nombres dinámicos.
- Las variables (ASSIGN o SAVEVALUE) se pisan si no están dentro del contexto. Usa siempre:ASSIGN CX$_nombre, valor
...para evitar colisiones entre instancias.
- Si el método necesita devolver un valor (como un "get"), puedes hacer:
CALL aaa.bbb.get
...y luego obtener el retorno con:
P$(get)
- Todos los
SAVEVALUEinternos deberían usarCX$_para ser privados a cada instancia.
Ejemplo:SAVEVALUE CX$_estado, 1
IMPORTANTE: LasEVcreadas conSIGNALoTIMEOUTmueren al finalizar el procedure, y susASSIGNdesaparecen.
SoloCALLusa una entidad real que mantiene sus variables.- Por coherencia y encapsulamiento, todo lo que se use desde fuera de una "clase" debe hacerse a través de sus métodos:
CALL instancia.objeto.metodo,...
...y no accediendo directamente a los nombres internos de gráficos, variables o recursos.
En el ejemplo:
Existen dos ficheros, el principal y una librería llamada "./library_graphics/tank.lib".
Puedes ver el código abriéndolo en el menú "OPEN".
Lo más interesante es que se configura la librería desde el programa principal desde PRE_RUN:
assign config,{title:"deposito" ,x:100,y:100 ,width:50 ,height:180 ,value:88 ,"color":"#ff0000"} call aaa.tank.init,V$configY se usa sin más desde el programa con
CALL:CALL aaa.tank.set, 10 CALL aaa.tank.get MOVE {NAME:Text1, TEXT:"Valor actual aaa: P$(get)"}
Example:
/* Contextos y módulos. Librerías gráficas */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Graphic {NAME:Text1,Type:TEXT,X:100,Y:319,Text:"Valor actual"} Graphic {NAME:Text2,Type:TEXT,X:300,Y:312,Text:"Valor actual"} START 100 include /library_graphics/tank.lib ;----------------------------------------------------------- ; Instanciamos dos depósitos con parámetros distintos ; Cada uno se genera en su propio contexto: aaa y bbb ; Los procedimientos serán los mismos, pero los datos y gráficos serán independientes PROCEDURE PRE_RUN assign config,{title:"tank" ,x:100,y:100 ,width:50 ,height:180 ,value:88 ,max_value:100 ,"color":"#ff0000"} call aaa.tank.init,V$config assign config2,{title:"tank" ,x:300,y:100 ,width:50 ,height:180 ,value:88 ,max_value:100 ,"color":"#ff00ff"} call bbb.tank.init,V$config2 TERMINATE_VE ENDPROCEDURE ;============================================================ GENERATE 25,0 {NAME:Gen1,x:100,y:400} CALL aaa.tank.set, 25 CALL bbb.tank.set, 35 ADVANCE 5 CALL aaa.tank.set, 52 CALL bbb.tank.setcolor, "blue" ADVANCE 5 CALL aaa.tank.get MOVE {NAME:Text1, TEXT:"Valor actual aaa: P$(get)"} CALL bbb.tank.get MOVE {NAME:Text2, TEXT:"Valor actual bbb: P$(get)"} CALL aaa.tank.set, 75 CALL bbb.tank.set, 10 ADVANCE 5 CALL aaa.tank.set, 90 ADVANCE 5 CALL aaa.tank.set, 10 ADVANCE 5 ENDGENERATE 1 -
- + Módulos
Ya hemos visto los contextos
CX$que resumiéndolos mucho son un assign especial de tipo string que sirve para que no coincidan los nombres de las variables y que se hereda de invocante a invocado. Es decir, si hacemosTIMEOUT, la EV que ejecute elPROCEDURElo hará con el mismo valor deCX$que el que lo llamó.También se puede establecer con el BLOQUE
CX:CX "sevilla"
Y a partir de ese punto, el SNA
CX$tendrá ese valor.Ahora que sabemos crear elementos gráficos con
NEWGRAPHICpasando el contexto, vamos a ver cómo crear un módulo completo con el mismo sistema.Un módulo es conjunto de GENERATEs, NEWFACILITYs, PROCEDUREs... que funcionarían por sí mismos, normalmente bajo un contexto y que suelen contener al menos un
GENERATE. Todo esto en un único fichero al que llamaremos con la extensión ".mod".Lo más particular de estos módulos es que se usan con un
INCLUDEy los parámetros afectarán a lo que esté en zona de bloques, pero no a lo que sea unGENERATEya que es el BLOQUE/COMANDO que no es exactamente un BLOQUE sino que también es un punto de programa que crea entidades y donde es seguro donde enviar una entidad conSCAPEoUNLOAD.Así que no tiene sentido hacer algo como:
GENERATE {name: CX$_gen,x:100,y:200}porque una entidad virtual no va a pasar por ella para crear el GENERATE ni mucho menos podrá realizar un
NEWGENERATE.Este sí es el aspecto de un
GENERATEen modulo:GENERATE 0,0,0,0 {name:hub,visible:0,x:700,y:100} advance 10,30 {from: hub , to:"CX$_posicion"} ENDGENERATE ;------------------------------------------- PROCEDURE hub.init ;... creación de recursos ENDPROCEDUREAl ejecutarse el
INCLUDE, lo único que sucede es que este fichero pasa a formar parte del código general. Se concatenan los textos de código GPSS-Plus sin más.Así que el código pasará a tener un nuevo
GENERATEllamado "hub" que podrá ser el punto de aterrizaje de cualquier entidad que llegue conSCAPEo conUNLOAD. Lo importante es que aterricen esas entidades con elCX$correcto.Por esto, un módulo sin GENERATE no puede recibir entidades desde fuera, por lo que no puede funcionar como subsistema autónomo. En este ejemplo, "hub" es la referencia al punto de programa.
En suma, lo que tendremos en un módulo será, normalmente, uno o varios GENERATEs que procesarán entidades provinientes de otros contextos o módulos o del principal con acceso a recursos bajo ese mismo contexto.
En el ejemplo veremos un sistema básico.
Del GENERATE principal parten las entidades para ir a parar a un conjuntos de recursos que en bloque son un módulo llamado "plantaReciclaje".
Este módulo tiene, además de un ".init" similar al de creación de cualquier librería con NewGraphic, NewFacility... tiene el
GENERATEpara que lleguen a él las entidades a través deSCAPEen el principal:scape plantaReciclaje {cx:"plantaA"}Y hará que cada entidad llegue al generate "plantaReciclaje" con su stack de direcciones vacío pero todos los assign intactos y el valor de contexto establecido.
generate 0,0,0,0 {name:plantaReciclaje,visible:0} call procesar terminate 1 endgenerate procedure procesar advance 10,10 {to:CX$_pos_in} advance 10,10 {to:CX$_fac1} seize CX$_fac1 advance 10,10 release CX$_fac1 advance 10,10 {to:CX$_pos_out} endprocedureEn cierto modo es algo como la clásica instrucción "GOTO" pero en el que solo se permite el salto a un punto de programa seguro que es el
GENERATE.
Example:
/* Contextos y módulos. Módulo simple */ SYSTEM {TYPE:OPTIONS, SPEED:5} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} Position {NAME:POS1,X:147,Y:311} START 200 include "./manual_es/Season_07_Contextos_y_modulos/modulo.mod" PROCEDURE PRE_RUN assign config,{title:"Planta_A" ,x:350,y:500 } CALL plantaA.plantaReciclaje.init,V$config assign config,{title:"Planta B" ,x:350,y:100 } CALL plantaB.plantaReciclaje.init,V$config TERMINATE_VE ENDPROCEDURE ;------------------------------------------------------ ; --- Flujo de entidades --- GENERATE 6,0 {NAME:GEN1,x:58,y:310} advance 15,0 {to:POS1} if (RANDOM > 0.5) scape plantaReciclaje {cx:"plantaA"} else scape plantaReciclaje {cx:"plantaB"} endif TERMINATE 1 - + Los módulos. Ejemplo completo
Vamos a ver un ejemplo de un sistema de control logístico.
Cada módulo se carga en un INCLUDE que se especializa en cada cosa.
Un JSON con los datos de varias ciudades será el punto de partida para crear los conjuntos de recursos de manera análoga a la que hemos visto.
Los paquetes se generan en los "punto_distribucion" almacenándose en un
RESTROOMparticular de ese punto.Una furgoneta recorre los puntos de distribución cargando en su BACKPACK los paquetes provinientes del
RESTROOM. Los BACKPACK y losRESTROOMfuncionan entre ellos. No es posible poner en una mochila las entidades de ningún otro recurso.La furgoneta descarga todas la entidades en el punto seguro
GENERATE"hub_distribucion" que se encargará de clasificar los paquetes en diferentesRESTROOMs. Tras esto, la furgoneta cargará cada saca ya clasificada hará de nuevo el recorrido entregando los paquetes en su destino.Al final, es un pequeño ejemplo de 150 líneas de código para hacer algo aparentemente complejo.
Example:
SYSTEM {TYPE:OPTIONS, SPEED:5} SYSTEM {TYPE:VISUAL, WIDTH:900,HEIGHT:600} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} START 1 include /logistica/namespace.mod include /logistica/punto_distribucion.mod include /logistica/hub_distribucion.mod include /logistica/transportes.mod PROCEDURE PRE_RUN CALL crear_puntos_de_distribucion CALL hub_distribucion.init TERMINATE_VE ENDPROCEDURE ;------------------------------------------------------ procedure crear_puntos_de_distribucion FOREACH ciudad, IN_OBJECT, V$(aCiudades) assign datosCiudad, V$(aCiudades.P$ciudad) assign config,{ title:"P$(ciudad)" ,x:P$(datosCiudad.x) ,y:P$(datosCiudad.y) } call P$ciudad.punto_distribucion.init,V$config ENDFOREACH endprocedure - + La rehidratación
Un concepto avanzado y complejo cuando el sistema crece es la rehidratación.
Rehidratar significa cargar el estado del sistema no desde el inicio, sino desde un punto avanzado en el tiempo, reconstruyendo la simulación tal y como estaba en ese instante.
En el ejemplo logístico esto es fundamental: no es lo mismo “empezar a simular paquetes” que cargar el estado real de un ERP y continuar la simulación desde ahí.De esta forma, el modelador se hace responsable de guardar todo aquello que quiera poder restaurar.
Este proceso implica resolver tres problemas profundos:
- El tiempo simulado global (AC1) debe avanzar hasta el instante guardado.
- Las entidades deben reprogramar sus tiempos internos, que siempre deben ser posteriores al nuevo AC1.
- La forma de modelar cambia radicalmente: ya no basta con describir procesos; ahora hay que reconstruirlos.
En esta fase, más que modelar, estamos programando. La rehidratación es un problema técnico, no declarativo.
En el ejemplo:
Así que supongamos que lo que tenemos almacenado es que 4 camiones daban vueltas en un circuito de 4 posiciones. Los datos almacenados por última vez son:
- Tiempo del sistema: 105
- Camión 1: Pasó por la fase F3 y llegaría a destino en 110
- Camión 2: Pasó por la fase F1 y llegaría a destino en 108
- Camión 3: Pasó por la fase F3 y llegaría a destino en 109
- Camión 4: Pasó por la fase F2 y llegaría a destino en 109
Para reconstruir (rehidratar) este estado necesitamos resolver los tres problemas anteriores.
1. Avanzar el tiempo global
El bloque
FORWARD_AC1permite mover el reloj simulado hacia adelante.
Lo habitual es colocarlo como primera instrucción delPRE_RUN, de modo que el modelo arranque directamente en el instante deseado.2. Reprogramar los tiempos de las entidades
Una vez que AC1 ha avanzado, todas las entidades deben tener tiempos posteriores al nuevo AC1.
Esto se consigue conUPDATE, que reprograma el final de unADVANCE. Y en este caso, añadiremos también el tiempo de inicio para que la visualización comience allí donde se quedó.La única condición es crítica:
UPDATE debe ejecutarse desde una VE cuando la entidad ya esté dentro de un ADVANCE.
Por eso la rehidratación requiere una pequeña coreografía temporal. Primero la introducimos en la cola correspondiente y después actualizamos los tiempos a través de unTIMEOUTinmediato.3. Reconstruir el punto del programa
Este es el problema más complejo.
Si existiera unGOTO, sería trivial: saltaríamos al punto exacto donde estaba cada entidad.
Pero no existe, y no debe existir.La solución correcta es:
Crear una máquina de estados finitos (FSM) local para cada entidad.
El estado de la FSM representa en qué punto del programa estaba la entidad cuando se guardó el sistema.
La lógica del modelo se reescribe para que cada entidad avance según su estado.Esto convierte el flujo del programa en un autómata explícito, perfectamente restaurable.
4. El detalle clave: toda entidad termina siempre en una cola
En un motor DES, el “estado último” de una entidad siempre es uno de estos:
- La cola de eventos, si está en un
ADVANCE. - La cola de un recurso, si está en un
SEIZE. - Una cola explícita, si está esperando.
Por tanto:
Los estados de la FSM deben corresponderse con estas colas.
No necesitamos reconstruir colas internas ni manipular estructuras ocultas:
basta con reinsertar las entidades en el punto correcto del programa, y el motor reconstruye el resto automáticamente.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} POSITION {NAME:Pos1,X:368,Y:429} POSITION {NAME:Pos2,X:634,Y:452} POSITION {NAME:Pos3,X:592,Y:164} POSITION {NAME:Pos4,X:343,Y:217} initial fsm_camion_logic, { STATES: [ "F1", "F2", "F3", "F4" ], TRANSITIONS: [ {FROM:"F1", INPUT:"tick", TO:"F2"}, {FROM:"F2", INPUT:"tick", TO:"F3"}, {FROM:"F3", INPUT:"tick", TO:"F4"}, {FROM:"F4", INPUT:"tick", TO:"F1"} ], INITIAL: "F1" } FSM {NAME:FSM_CAMION, LOCAL:1, LOGIC:V$(fsm_camion_logic)} FACILITY {NAME:Fac1,X:633,Y:385} Graphic {NAME:Text1,Type:TEXT,X:324,Y:100} START 100 ;------------------------------- PROCEDURE PRE_RUN FORWARD_AC1 105 assign params,{status:"F2",tiempoIni:90,tiempo:110,matricula:"1111"} new GEN1,0,V$params assign params,{status:"F3",tiempoIni:88,tiempo:108,matricula:"2222"} new GEN1,0,V$params assign params,{status:"F2",tiempoIni:89,tiempo:109,matricula:"3333"} new GEN1,0,V$params assign params,{status:"F2",tiempoIni:104,tiempo:124,matricula:"4444"} new GEN1,0,V$params TERMINATE_VE ENDPROCEDURE ;------------------------------- PROCEDURE camion_update ; PARAM_A -> Numero entidad ; PARAM_B -> tiempo final ; PARAM_C -> tiempo inicial move {name:Text1,text:"camion_update P$(FSM_CAMION,P$PARAM_A) P$PARAM_C"} if (D$(IN_ADVANCE,P$PARAM_A)==1) update P$PARAM_A, P$PARAM_B, P$PARAM_C endif TERMINATE_VE endprocedure 1 ;------------------------------- GENERATE 0,0,0,0 {NAME:GEN1,X:62,Y:396} assign params,V$PARAM_A assign FSM_CAMION,"P$(params.status)" mod {subtitle:"P$(params.matricula)"} ; debe ser una VE y que se ejecute una vez hayan arrancado los advance. timeout camion_update,0,D$N,P$(params.tiempo),P$(params.tiempoIni) ; move {name:Text1,text:"Camión inicializado P$PARAM_C R$(FSM_CAMION,STATE) P$FSM_CAMION"} while (1==1) STATE FSM_CAMION,"tick" switch "R$(FSM_CAMION,STATE)" case ==,"F1" advance 20 {from:Pos4, to:Pos1} endcase case ==,"F2" advance 20 {from:Pos1, to:Pos2} endcase case ==,"F3" seize Fac1 advance 40 {from:Pos2, to:Pos3} release Fac1 endcase case ==,"F4" advance 20 {from:Pos3, to:Pos4} endcase endswitch endwhile endgenerate 1 ;-------------------------------
- + Creación de recursos dinámicos 1
- + Season 8: Estadísticas
- + Acumulando datos en tablas
La simulación y la estadística van de la mano. Poco podremos hacer si no tenemos claros algunos conceptos básicos. En GPSS-Plus, los cálculos estadísticos se dividen en tres grandes grupos:
-
Tiempos que una entidad permanece en un recurso (orientado a la entidad).
-
Tiempos que un número de entidades está ocupando un recurso (orientado al recurso).
-
Cualquier otro dato personalizado que quieras medir (orientado al modelo).
En este primer ejemplo, trabajamos con el caso 3, donde queremos medir el tiempo que una entidad permanece en un tramo del circuito, incluyendo un recurso (una
FACILITY) y su entorno.Uso de TABLE para registrar tiempos de permanencia:
GPSS-Plus automatiza gran parte del trabajo. Solo tienes que crear una
TABLEcon los parámetros adecuados:TABLE {name: TABLA1, E_BIN_START:0, E_BIN_SIZE:1, E_BIN_COUNT:100, EXPRESSION:(AC1$ - P$TIEMPOINICIO)}Esto configura una tabla de 100 celdas de 1 unidad de ancho, que empieza en 0. Cada vez que ejecutemos
TABULATE TABLA1, se ejecutará EXPRESSION :(AC1$ - P$TIEMPOINICIO)
donde calculará la diferencia entre el tiempo actual (
AC1$) y un instante anterior (P$TIEMPOINICIO) guardado previamente.Este valor, que representa la permanencia de la entidad en el conjunto de recursos o zona del modelo, se acumulará en la celda correspondiente.
Un ejemplo básico
Creamos entidades que avanzan DESDE UN PUNTO pasando por una
FACILITYY HASTA OTRO PUNTO. después tabulamos la duración:GENERATE 8,3 ADVANCE 30,0 {TO:POS1} ASSIGN TIEMPOINICIO,AC1$ ; Inicio del cómputo ADVANCE 20,0 {TO:VENTANILLA1} ; + 20 SEIZE VENTANILLA1 ADVANCE 20,20 ; +20 a +40 (aleatorio) + Tiempo en cola RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS2} ; + 20 TABULATE TABLA1 ; Fin del cómputo ADVANCE 20,0 {TO:POS3} ENDGENERATE¿Qué mide la tabla?
Si observas los resultados en el informe (botón superior derecho), verás una distribución rectangular (uniforme) entre 60 y 80, con algunos tiempos superiores de las entidades que han permanecido en la cola. Es decir, que todas las entidades han permanecido un tiempo dentro de ese rango, como se esperaba.
Este es un buen punto de partida para empezar a analizar comportamientos internos del modelo con datos objetivos.
Example:
/* Acumulando datos en tablas */ FACILITY {NAME:VENTANILLA1,X:380,Y:348,capacity:4} POSITION {NAME:POS1,X:218,Y:437} POSITION {NAME:POS2,X:591,Y:429} POSITION {NAME:POS3,X:713,Y:329} Graphic {NAME:Line1,Type:LINE,color:#FF0000, X1:218,Y1:500,X2:592,Y2:500} Graphic {NAME:Text1,Type:TEXT,X:410,Y:527,Text:"Estadistic section"} TABLE {name: TABLA1,E_BIN_START:50,E_BIN_SIZE:1,E_BIN_COUNT:60,EXPRESSION:(AC1$ - P$TIEMPOINICIO)} ;TABLE {name: TABLA1,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:160,EXPRESSION:(AC1$ - D$M0)} START 500 ;*************************************************************** GENERATE 8,3 {NAME:GEN1,X:66,Y:350} ADVANCE 40,0 {TO:POS1} ASSIGN TIEMPOINICIO,AC1$ ADVANCE 20,0 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE 20,20 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS2} TABULATE TABLA1 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 ;*************************************************************** -
- + Tiempo de entidades
Ahora pasamos a las estadísticas centradas en el tiempo de las entidades en el recurso.
El las estadísticas calculadas sobre un único recurso se calculan automáticamente por GPSS-Plus:
Facility {NAME:ventanilla1,X:377,Y:362,capacity:10 ,E_BIN_START:18,E_BIN_SIZE:1,E_BIN_COUNT:14 }Medimos el tiempo que una entidad (E) que permanece en el recurso con los parámetros
E_BIN_*que tiene el mismo significado que en el bloqueTABLE.En el ejemplo siguiente, se generan entidades a un ritmo constante, y la
FACILITYcontiene un ADVANCE 20,10 lo que significa que el resultado estadístico serán datos entre 20 y 30.
Example:
/* Tiempo de entidades */ SYSTEM {TYPE:OPTIONS,Speed:7} POSITION {NAME:POS1,X:620,Y:360} Facility {NAME:ventanilla1,X:377,Y:362,capacity:10,E_BIN_START:18,E_BIN_SIZE:1,E_BIN_COUNT:14} START 200 ;***************************************************** GENERATE 8,0,0,0 {NAME:GEN1,X:111,Y:366} ADVANCE 10 {TO:ventanilla1} seize ventanilla1 ADVANCE 20,10 release ventanilla1 ADVANCE 10 {TO:POS1} TERMINATE 1 - + Uso del recurso
Ahora pasamos a las estadísticas centradas en el uso de un recurso, es decir, en cuánto tiempo ha estado ocupado por una o más entidades.
Si antes medíamos el tiempo que una entidad (E) permanece en el recurso con los parámetros
E_BIN_*, ahora, para observar cómo de ocupado ha estado el recurso en cada instante, usamosR_BIN_*.La tabla creada con
R_BIN_*nos indica, para cada nivel de ocupación (0, 1, 2, ...), cuánto tiempo el recurso ha estado exactamente con esa cantidad de uso.En el ejemplo siguiente, se generan entidades a un ritmo constante, y la
FACILITYtiende a tener entre 4 y 6 unidades ocupadas, algo que se verá reflejado como un pico en ese rango en la gráfica generada automáticamente.Por supuesto, nada impide que uses a la vez
E_BIN_*yR_BIN_*sobre un mismo recurso, si deseas tener una visión desde ambos ángulos: el de la entidad y el del recurso.
Example:
/* Uso del recurso */ SYSTEM {TYPE:OPTIONS,Speed:7} POSITION {NAME:POS1,X:620,Y:360} Facility {NAME:ventanilla1,X:377,Y:362,capacity:10,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:11} START 200 ;***************************************************** GENERATE 5,3,0,0 {NAME:GEN1,X:111,Y:366} ADVANCE 10 {TO:ventanilla1} seize ventanilla1 ADVANCE 20,10 release ventanilla1 ADVANCE 10 {TO:POS1} ENDGENERATE 1 - + Las colas
Las colas también pueden ser objeto de análisis estadístico. En GPSS-Plus, funcionan exactamente igual que los recursos, pero se gestionan de forma separada mediante estructuras específicas llamadas
QUEUER.Para activar la recogida de estadísticas, basta con envolver el acceso al recurso con
QUEUEyDEPART:queue Qventanilla1 seize ventanilla1 depart Qventanilla1
Esto habilita el cálculo automático de:
-
El número de entidades en cola a lo largo del tiempo (
R_BIN_*) -
El tiempo de espera que cada entidad pasa en cola (
E_BIN_*)
En el informe, podrás visualizar gráficamente cómo se comportó la cola: cuándo se formó, cuánto tiempo esperaron las entidades, y si el dimensionamiento del recurso fue suficiente.
El siguiente ejemplo muestra una
FACILITYcon colas frecuentes. Al aplicarQUEUE/DEPART, el sistema captura toda la estadística sin ningún código adicional.
Example:
/* Las colas */ SYSTEM {TYPE:OPTIONS,Speed:7} POSITION {NAME:POS1,X:620,Y:360} QUEUER {NAME:Qventanilla1,X:374,Y:424 ,R_BIN_START:0,R_BIN_SIZE:1,R_BIN_COUNT:20 ,E_BIN_START:0,E_BIN_SIZE:1,E_BIN_COUNT:20 } Facility {NAME:ventanilla1,X:373,Y:365,capacity:5} START 200 ;***************************************************** GENERATE 5,3,0,0 {NAME:GEN1,X:111,Y:366} ADVANCE 10 {TO:ventanilla1} queue Qventanilla1 seize ventanilla1 depart Qventanilla1 ADVANCE 20,10 release ventanilla1 ADVANCE 10 {TO:POS1} ENDGENERATE 1 -
- + Storages
Los
STORAGEson un tipo especial de recurso. A diferencia de lasFACILITY, que gestionan entidades de forma individual, unSTORAGEgestiona cantidades variables que una entidad puede introducir o extraer.Por ejemplo, una entidad puede representar un camión que deja 10 unidades en un depósito. Por tanto, el sistema no analiza cuántas entidades han pasado por el almacén, sino cuántas unidades se han almacenado y durante cuánto tiempo.
¿Qué se mide?
Se recogen dos tipos de estadísticas:
-
EQ_BIN_*: Tiempo que cada unidad permanece en el almacenamiento (tiempo de ocupación por unidad).
-
RQ_BIN_*: Nivel de ocupación del almacenamiento en cada momento (por cantidad).
Este comportamiento se activa igual que en otros recursos, pero usando los parámetros
EQ_BIN_*yRQ_BIN_*para configurar los intervalos de las tablas.Un ejemplo práctico
El siguiente código muestra un almacenamiento (
STORAGE) con capacidad de 14 unidades. Las entidades entrantes ocupan una cantidad aleatoria (entre 1 y 5 unidades). La estadística resultante indicará cuánto tiempo estuvieron almacenadas esas unidades y cómo varió el nivel de ocupación del almacén:STORAGE {NAME:almacen1,X:377,Y:362,capacity:14, EQ_BIN_START:18,EQ_BIN_SIZE:1,EQ_BIN_COUNT:14, RQ_BIN_START:0, RQ_BIN_SIZE:1, RQ_BIN_COUNT:18} GENERATE 8,0,0,0 ADVANCE 10 {TO:almacen1} ENTER almacen1,(RANDOM*5)+1 ADVANCE 20,10 LEAVE almacen1 ADVANCE 10 {TO:pos1} ENDGENERATE 1¿Qué observar?
En el informe, verás dos tablas diferentes:
-
Una con los tramos de tiempo por unidad almacenada (
EQ), que te dirá si las unidades permanecieron poco o mucho tiempo en el almacén. -
Otra con los niveles de ocupación del almacén (
RQ), donde podrás ver cuántas unidades había simultáneamente en cada instante.
Este tipo de análisis es esencial en modelos de logística, inventario, o cualquier sistema con almacenamiento variable.
Example:
/* Storages */ SYSTEM {TYPE:OPTIONS,Speed:7} POSITION {NAME:POS1,X:620,Y:360} STORAGE {NAME:almacen1,X:377,Y:362,capacity:14 ,EQ_BIN_START:18,EQ_BIN_SIZE:1,EQ_BIN_COUNT:14 ,RQ_BIN_START:0,RQ_BIN_SIZE:1,RQ_BIN_COUNT:18 } START 200 ;***************************************************** GENERATE 8,0,0,0 {NAME:GEN1,X:111,Y:366} ADVANCE 10 {TO:almacen1} ENTER almacen1,(RANDOM*5)+1 ADVANCE 20,10 LEAVE almacen1 ADVANCE 10 {TO:POS1} ENDGENERATE 1 -
- + Resumen
En GPSS-Plus, las estadísticas se acumulan automáticamente si se definen las tablas con los parámetros adecuados. Existen varios tipos de estadísticas, clasificadas por lo que se mide:
Estadísticas por entidad (
E_BIN_*)Mide cuánto tiempo ha permanecido cada entidad en un recurso.
-
Aplicable a: Todos los recursos (
FACILITY,STORAGE,QUEUE, etc.) -
Ejemplo: Una entidad pasa 40 unidades de tiempo → se suma 1 al bin 40.
Estadísticas por recurso (
R_BIN_*)Mide cuánto tiempo un recurso ha tenido una cantidad concreta de entidades activas.
-
Aplicable a: Todos los recursos
-
Ejemplo: El recurso tiene 3 entidades durante 10 unidades → se suma 10 al bin 3.
Estadísticas por unidad almacenada (
EQ_BIN_*)Mide cuánto tiempo permanece cada unidad dentro de un
STORAGE.-
Aplicable a: Solo
STORAGE -
Ejemplo: Un camión con 5 unidades permanece 40 tiempos → se suma 5 al bin 40.
Estadísticas por cantidad en almacenamiento (
RQ_BIN_*)Mide cuánto tiempo un
STORAGEcontiene cierta cantidad total de unidades.-
Aplicable a: Solo
STORAGE -
Ejemplo: 3 unidades durante 10 tiempos → se suma 30 al bin 3.
Colas (QUEUER)
Las colas tienen su propia tabla de estadísticas si se declara un
QUEUER. Para recoger datos:queue Cola1 seize Recurso1 depart Cola1 ADVANCE ... release Recurso1
Se peude aplicar:
-
E_BIN_*: Tiempo que cada entidad pasó en cola. -
R_BIN_*: Tiempo que la cola tuvo X entidades esperando.
Personalización total:
TABLE+TABULATEPara registrar datos arbitrarios:
TABLE {name:TABLA1, E_BIN_START:0, E_BIN_SIZE:1, E_BIN_COUNT:100, EXPRESSION:(AC1$ - P$TIEMPOINICIO)} TABULATE TABLA1Esto permite medir cualquier cosa definida por una expresión matemática.
-
- + Acumulando datos en tablas
- + Season 9: Funciones
- + Definiendo las funciones
¿Qué es una función?
Una función es un componente que produce un valor numérico a partir de una entrada. Ese valor puede representar tiempos, cantidades, costes, o cualquier otro parámetro variable que queramos incorporar al modelo.
En términos matemáticos, podríamos escribir algo como:
f(x) = 10 + (x * 5)
Si
xtoma valores entre 0 y 1, entoncesf(x)tomará valores entre 10 y 15.En GPSS-Plus, cuando usamos:
ADVANCE 10,5
estamos usando esa función implícita, se genera un valor aleatorio entre 0 y 1, lo multiplica y resuelve un valor entre 10 y 15.
En términos estadísticos, eso es una distribución uniforme entre 10 y 15, es decir: todos los valores dentro del rango tienen la misma probabilidad de ocurrir.
Uso de las funciones:
En muchos casos la realidad no es uniforme.
Si medimos cuánto tardan 1000 vehículos en recorrer 100 km. La mayoría tardará cerca de 1 hora. Algunos tardarán algo menos, otros algo más. Pero casi ninguno lo hará en 30 minutos o en 2 horas.
Eso no es una distribución uniforme. Es lo que se conoce como una distribución normal o gaussiana.
Por eso, GPSS-Plus permite definir funciones que modelen con mayor precisión comportamientos como estos. Existen dos métodos para hacerlo:
1. FUNCTION tipo
VALUESCon este método, definimos manualmente una función basada en una tabla acumulada de probabilidades.
Function { NAME: funValues, TYPE: "VALUES", EXPRESSION: "RANDOM", VALUES: "0.0001,0.0000/0.0002,0.0101/.../1.0000,1.0000/" }Esta tabla asocia claves (probabilidades acumuladas entre 0 y 1
EXPRESSION: "RANDOM") con valores resultantes. Si el valor aleatorio generado es 0.33, la función busca el intervalo que le corresponde (por ejemplo, entre 0.0293 y 0.2121) y devuelve el valor asociado que representa una distribución de tipo campana (gaussiana), donde los valores extremos tienen menos probabilidad que los valores centrales.Entonces, una instrucción como:
ADVANCE 20 + (FN$funValues * 20)
Generará valores entre 20 y 40, concentrados en torno al 30.
2. FUNCTION tipo
GAUSSEste método permite definir directamente una distribución gaussiana mediante sus parámetros característicos:
Function { NAME: funGauss, TYPE: "GAUSS", A: 1, B: 30, SIGMA1: 3.3, SIGMA2: 3.3, INTERVALS: 100 }A: altura de la curva (no afecta al resultado, es visual)B: valor central (media)SIGMA1,SIGMA2: desviaciones estándar izquierda y derechaINTERVALS: cantidad de divisiones para la función
Con esta función, simplemente usamos:
ADVANCE FN$funGauss
Ambas técnicas producirán una distribución de tiempos en torno al valor 30, pero con métodos diferentes: una tabla predefinida frente a una curva construida automáticamente.
Visualización y validación
Las
FACILITYcon parámetros como:E_BIN_START:16, E_BIN_SIZE:1, E_BIN_COUNT:40
registran estadísticas automáticas sobre cuánto tiempo ha permanecido cada entidad en el recurso. Estas estadísticas se visualizan en el informe y permiten comprobar cómo se comporta realmente la función.
Veremos que, en ambos casos, la gráfica resultante es una distribución gaussiana. Esto permite validar que tanto la tabla manual como la función generada ofrecen comportamientos coherentes.
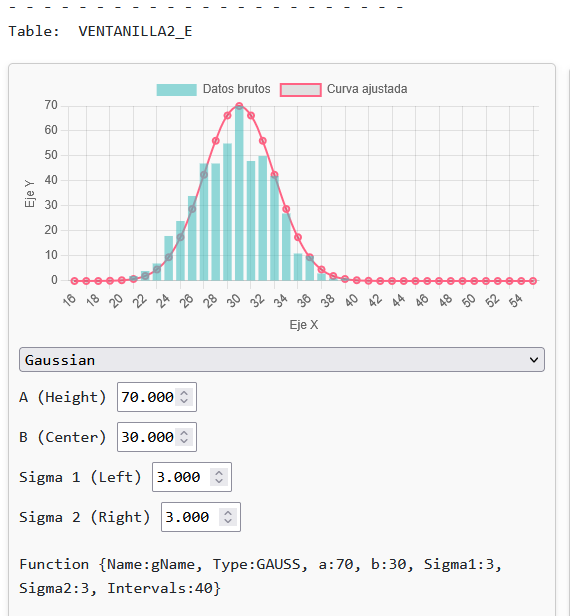
Example:
/* Definiendo las funciones */ SYSTEM {TYPE:OPTIONS,Speed:5} Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:16,E_BIN_SIZE:1,E_BIN_COUNT:40,capacity:3} Facility {NAME:VENTANILLA2,X:384,Y:186,E_BIN_start:16,E_BIN_SIZE:1,E_BIN_COUNT:40,capacity:3} POSITION {NAME:POS1,X:278,Y:381} POSITION {NAME:POS2,X:482,Y:380} Function {name:funGauss, type:"GAUSS", a:1, b:30, sigma1:3.3, sigma2:3.3,intervals:100 } Function {NAME:funValues,type:"VALUES",expression:"RANDOM",VALUES:" 0.0001,0.0000/0.0002,0.0101/0.0004,0.0202/0.0006,0.0303/0.0008,0.0404/ 0.0011,0.0505/0.0015,0.0606/0.0020,0.0707/0.0025,0.0808/0.0032,0.0909/ 0.0039,0.1010/0.0049,0.1111/0.0060,0.1212/0.0073,0.1313/0.0088,0.1414/ 0.0106,0.1515/0.0128,0.1616/0.0152,0.1717/0.0180,0.1818/0.0213,0.1919/ 0.0250,0.2020/0.0293,0.2121/0.0341,0.2222/0.0396,0.2323/0.0458,0.2424/ 0.0527,0.2525/0.0603,0.2626/0.0689,0.2727/0.0783,0.2828/0.0887,0.2929/ 0.1000,0.3030/0.1124,0.3131/0.1258,0.3232/0.1403,0.3333/0.1559,0.3434/ 0.1726,0.3535/0.1904,0.3636/0.2093,0.3737/0.2292,0.3838/0.2501,0.3939/ 0.2720,0.4040/0.2948,0.4141/0.3185,0.4242/0.3429,0.4343/0.3680,0.4444/ 0.3937,0.4545/0.4199,0.4646/0.4464,0.4747/0.4731,0.4848/0.5000,0.4949/ 0.5269,0.5051/0.5536,0.5152/0.5801,0.5253/0.6063,0.5354/0.6320,0.5455/ 0.6571,0.5556/0.6815,0.5657/0.7052,0.5758/0.7280,0.5859/0.7499,0.5960/ 0.7708,0.6061/0.7907,0.6162/0.8096,0.6263/0.8274,0.6364/0.8441,0.6465/ 0.8597,0.6566/0.8742,0.6667/0.8876,0.6768/0.9000,0.6869/0.9113,0.6970/ 0.9217,0.7071/0.9311,0.7172/0.9397,0.7273/0.9473,0.7374/0.9542,0.7475/ 0.9604,0.7576/0.9659,0.7677/0.9707,0.7778/0.9750,0.7879/0.9787,0.7980/ 0.9820,0.8081/0.9848,0.8182/0.9872,0.8283/0.9894,0.8384/0.9912,0.8485/ 0.9927,0.8586/0.9940,0.8687/0.9951,0.8788/0.9961,0.8889/0.9968,0.8990/ 0.9975,0.9091/0.9980,0.9192/0.9985,0.9293/0.9989,0.9394/0.9992,0.9495/ 0.9994,0.9596/0.9996,0.9697/0.9998,0.9798/0.9999,0.9899/1.0000,1.0000/ "} START 500 ;***************************************************** GENERATE 10,0,0,0 {NAME:GEN1,X:91,Y:383} ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE 20 + (FN$funValues * 20) ; definición clásica RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$funGauss ; definición por parámetros ;ADVANCE 2 ; definición por parámetros RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ENDGENERATE 1 - + Tipos de funciones de distribución
El comando
FUNCTIONpermite definir funciones que devuelven valores numéricos, ya sea mediante cálculos directos o a través de tablas de distribución precalculadas. Estas funciones se utilizan para simular comportamientos variables y realistas en operaciones comoADVANCE,ASSIGN,TABULATE, etc., y representan tiempos, cantidades, costes, probabilidades y más.En GPSS-Plus, las funciones pueden clasificarse en dos grandes grupos:
1. Funciones basadas en distribuciones estadísticas (con tabla de valores)
Estas funciones generan previamente una tabla interna con un número configurable de puntos (intervalos), sobre la que interpolan el resultado. Son ideales para representar comportamientos aleatorios con patrones conocidos. Los tipos disponibles son:
-
GAUSS: Distribución normal (campana de Gauss). -
EXP: Distribución exponencial decreciente. -
UNIFORM: Distribución uniforme (rectangular). -
TRIANGULAR: Distribución triangular. -
LOGNORMAL: Distribución log-normal, asimétrica hacia la derecha. -
FDISTRIBUTION: Permite definir una función de distribución personalizada mediante una fórmula matemática.
2. Funciones de cálculo directo (sin tabla)
Estas funciones evalúan el resultado directamente, sin generar ni consultar una tabla. Son más flexibles cuando se desea trabajar con fórmulas o con modelos de conteo de eventos discretos. Incluyen:
-
POISSON: Genera un valor entero aleatorio según una distribución de Poisson (número de eventos por intervalo). -
MATH: Evalúa directamente una expresión matemática. Admite múltiples parámetros que se sustituyen por letras (A,B,C, etc.) en orden.
Example:
Function {name:funGauss, type:"GAUSS", a:1, b:30, sigma1:3.3, sigma2:3.3,intervals:100 } Function {name:funExp, type:"EXP", b:0, lambda:0.15, intervals:100} Function {name:funUni, type:"UNIFORM", min:20, max:40, intervals:100} Function {name:funTri, type:"TRIANGULAR", min:20, max:40, mode:30, intervals:100} Function {name:funLog, type:"LOGNORMAL", mu:3.4, sigma:0.3, intervals:100} Function {name:funLog2, type:"LOGNORMAL", b:30, spread:5, intervals:100} Function {name:funCus, type:"FDISTRIBUTION", function:"A * Math.sin(B * x)", a:10, b:0.5, min:0, max:10, intervals:100} Function {name:funPoi, type:"POISSON", lambda:3.5} Function {Name:math1, type: math, EXPRESSION:"A * 2 + B"} -
- + Función Gauss
La distribución gaussiana (o normal) representa una curva en forma de campana, donde los valores más probables están cerca de un valor central y los extremos tienen menor probabilidad. Es ideal para modelar fenómenos naturales como tiempos de atención, errores de medición o duración de procesos, donde la mayoría de los casos se agrupan alrededor de una media.
Parámetros:
- a: Altura de la curva (solo para visualización, no afecta al cálculo).
- b: Valor central o media esperada del proceso.
- sigma1: Dispersión (desviación estándar) hacia la izquierda del centro.
- sigma2: Dispersión hacia la derecha del centro. Puede ser distinta a sigma1 para generar asimetría.
- intervals: Número de tramos en que se divide la curva. A mayor número, más precisa.
Por construcción, la distribución tomará valores aproximadamente entre
b - sigma1 * 3yb + sigma2 * 3.Este ejemplo muestra cómo tres ventanillas con funciones gaussianas diferentes producen distintas distribuciones de tiempos de servicio:
ADVANCE FN$gfun1 ; simétrica ADVANCE FN$gfun2 ; dispersión derecha ADVANCE FN$gfun3 ; dispersión izquierda

Example:
/* Gauss */ SYSTEM {TYPE:OPTIONS,Speed:5} Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA2,X:343,Y:185,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA3,X:535,Y:183,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} POSITION {NAME:POS1,X:250,Y:381} POSITION {NAME:POS2,X:423,Y:383} POSITION {NAME:POS3,X:566,Y:384} Function {name:gfun1, TYPE:GAUSS, a:1, b:50, sigma1:3.3, sigma2:3.3,intervals:100 } Function {name:gfun2, TYPE:GAUSS, a:1, b:50, sigma1:1.0, sigma2:10.0,intervals:100 } Function {name:gfun3, TYPE:GAUSS, a:1, b:50, sigma1:10.0, sigma2:1.0,intervals:100 } START 500 ;***************************************************** GENERATE 10,0,0,0 {NAME:GEN1,X:91,Y:383} ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$gfun1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$gfun2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ADVANCE 20,0 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE FN$gfun3 RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 - + Función Exponencial
La distribución exponencial se utiliza para modelar eventos que ocurren de manera aleatoria pero con una probabilidad decreciente en el tiempo. Es ideal para situaciones como tiempos de espera, fallos de sistemas o llegadas al azar donde lo más probable es que algo ocurra al principio, y sea menos probable cuanto más se demore.
Un ejemplo clásico: "Si estás esperando a ser atendido, es más probable que ocurra pronto; y cada minuto adicional reduce esa probabilidad."
Esto no lo representa bien una distribución uniforme (como
ADVANCE 10,5), pero sí una función exponencial, definida con el tipo:Function {name:efun1, type:"EXP", a:100, b:20, lambda:0.3, intervals:100}Parámetros
-
a: Altura de la curva (solo para visualización, no afecta al cálculo).
-
b: Valor base mínimo. Es el punto desde el cual comienza la distribución.
-
lambda: Tasa de decrecimiento. A mayor lambda, la caída es más rápida.
-
intervals: Número de tramos en los que se divide la curva (cuantos más, más precisa).
Aproximadamente, el 99.9% de los valores estarán dentro del rango:
-
λ = 1 → de b a b + 6.91
-
λ = 0.5 → de b a b + 13.82
-
λ = 2 → de b a b + 3.45
Ejemplo de uso comparativo:
Function {Name:efun1, type:"EXP", a:100, b:20, lambda:0.3, intervals:70} Function {Name:efun2, type:"EXP", a:100, b:20, lambda:0.6, intervals:70} Function {Name:efun3, type:"EXP", a:100, b:20, lambda:1.0, intervals:70} ADVANCE FN$efun1 ; caída lenta ADVANCE FN$efun2 ; caída media ADVANCE FN$efun3 ; caída rápida
Example:
/* Exponential */ SYSTEM {TYPE:OPTIONS, Speed:5} ;=== Facilities con seguimiento estadístico === Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA2,X:343,Y:185,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA3,X:535,Y:183,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} ;=== Posiciones finales para visualización === POSITION {NAME:POS1, X:250, Y:381} POSITION {NAME:POS2, X:423, Y:383} POSITION {NAME:POS3, X:566, Y:384} ;=== EFunctions con distintas tasas de caída === Function {Name:efun1, TYPE:EXP, a:100, b:20, Lambda:0.3, Intervals:70} Function {Name:efun2, TYPE:EXP, a:100, b:20, Lambda:0.6, Intervals:70} Function {Name:efun3, TYPE:EXP, a:100, b:20, Lambda:1.0, Intervals:70} ;=== Inicio de simulación === START 500 ;=== Flujo de entidades por las tres ventanillas === GENERATE 10,0,0,0 {NAME:GEN1, X:91, Y:383} ; VENTANILLA 1 – Caída lenta ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$efun1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ; VENTANILLA 2 – Caída media ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$efun2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ; VENTANILLA 3 – Caída rápida ADVANCE 20,0 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE FN$efun3 RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 -
- + Función Log-Normal
¿Qué es la distribución log-normal?
Una variable sigue una distribución log-normal si el logaritmo de esa variable tiene una distribución normal. En otras palabras:
“Muchos eventos pequeños ocurren frecuentemente, pero también es posible que aparezcan algunos eventos con valores muy grandes, aunque con baja probabilidad.”
Casos típicos:
-
Tiempo de reparación de una máquina.
-
Duración de una llamada telefónica.
-
Ingresos económicos (la mayoría gana poco, unos pocos ganan mucho).
Function {Name:lfunc1, Type:LOGNORMAL, b:30, sigma:0.1}Parámetros:
b: Valor más probable de la función (el pico de la curva).sigma: Controla la dispersión de los valores hacia la derecha. A mayor sigma, más amplia es la “cola” de la distribución.
GPSS-Plus convierte automáticamente estos valores a los parámetros matemáticos
μ(media logarítmica) yσ(desviación estándar) para construir la curva log-normal.A diferencia de la gaussiana, la log-normal no es simétrica. Tiene una “cola” larga hacia valores más altos. Este comportamiento refleja bien los fenómenos donde los valores extremos son raros, pero posibles.
Este ejemplo muestra tres funciones log-normales con el mismo tipo de curva, pero distinta dispersión.
Function {Name:lfunc1, Type:LOGNORMAL, b:30, sigma:0.1} ; curva estrecha Function {Name:lfunc2, Type:LOGNORMAL, b:20, sigma:0.15} ; dispersión media Function {Name:lfunc3, Type:LOGNORMAL, b:40, sigma:0.2} ; cola larga
Example:
/* Log-normal */ SYSTEM {TYPE:OPTIONS, Speed:5} Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:100,capacity:10} Facility {NAME:VENTANILLA2,X:343,Y:185,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:100,capacity:10} Facility {NAME:VENTANILLA3,X:535,Y:183,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:100,capacity:10} POSITION {NAME:POS1, X:250, Y:381} POSITION {NAME:POS2, X:423, Y:383} POSITION {NAME:POS3, X:566, Y:384} Function {Name:lfunc1, Type: LOGNORMAL, b:30, sigma:0.1} Function {Name:lfunc2, Type: LOGNORMAL, b:20, sigma:0.15} Function {Name:lfunc3, Type: LOGNORMAL, b:40, sigma:0.2} START 500 GENERATE 10,0,0,0 {NAME:GEN1, X:91, Y:383} ; VENTANILLA 1 – Dispersión pequeña ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$lfunc1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ; VENTANILLA 2 – Dispersión media ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$lfunc2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ; VENTANILLA 3 – Dispersión grande (cola larga) ADVANCE 20,0 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE FN$lfunc3 RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 -
- + Función Uniforme
La distribución uniforme representa la máxima incertidumbre: todos los valores dentro de un rango tienen exactamente la misma probabilidad.
"Es como lanzar un dado perfecto: ningún número tiene más posibilidades que otro."
Este tipo de distribución es útil cuando no hay razones para pensar que unos valores sean más probables que otros.

Parámetros
Function {Name:ufun1, TYPE:UNIFORM, Min:20, Max:40}-
Min: valor mínimo que puede tomar la función. -
Max: valor máximo que puede tomar la función.
Todos los valores entre Min y Max tienen la misma probabilidad.
En el gráfico del informe, la curva tiene forma de rectángulo plano. Cuanto mayor sea el rango, más dispersa será la distribución.
Este ejemplo compara tres distribuciones uniformes con distintos rangos. Todas tienen forma rectangular, pero difieren en amplitud y posición:
Function {Name:ufun1, TYPE:UNIFORM, Min:20, Max:40} ; Rango pequeño Function {Name:ufun2, TYPE:UNIFORM, Min:20, Max:60} ; Rango amplio Function {Name:ufun3, TYPE:UNIFORM, Min:30, Max:50} ; Rango desplazado
Example:
/* Uniforme */ SYSTEM {TYPE:OPTIONS, Speed:5} Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA2,X:343,Y:185,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA3,X:535,Y:183,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} POSITION {NAME:POS1, X:250, Y:381} POSITION {NAME:POS2, X:423, Y:383} POSITION {NAME:POS3, X:566, Y:384} Function {Name:ufun1, TYPE:UNIFORM, Min:20, Max:40} Function {Name:ufun2, TYPE:UNIFORM, Min:20, Max:60} Function {Name:ufun3, TYPE:UNIFORM, Min:30, Max:50} START 500 GENERATE 10,0,0,0 {NAME:GEN1, X:91, Y:383} ; VENTANILLA 1 – Uniforme de 20 a 40 ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$ufun1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ; VENTANILLA 2 – Uniforme de 20 a 60 ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$ufun2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ; VENTANILLA 3 – Uniforme de 30 a 50 ADVANCE 20,0 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE FN$ufun3 RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS3} TERMINATE 1 -
- + Función Triangular
La distribución triangular permite definir una estimación mínima, máxima y más probable (modo) de un valor. Tiene forma de triángulo, donde el valor del modo es el más frecuente y los extremos son menos probables.
Es útil cuando tienes una idea aproximada del comportamiento de un proceso, pero no datos suficientes para definir una distribución más compleja.
“Una entrega normalmente tarda 3 días, pero podría hacerlo en 2 o en 5.”
Ese tipo de incertidumbre es ideal para una distribución triangular.
Parámetros
Function {Name:tfun1, TYPE:TRIANGULAR, Min:20, Max:40, Mode:30}Min: Valor mínimo posible.Max: Valor máximo posible.Mode: Valor más probable (pico de la distribución).
Este ejemplo compara tres funciones triangulares con diferentes posiciones del pico. Todas con el mismo rango, pero con distintas distribuciones:
Function {Name:tfun1, TYPE:TRIANGULAR, Min:20, Max:40, Mode:30} ; Pico centrado Function {Name:tfun2, TYPE:TRIANGULAR, Min:20, Max:40, Mode:25} ; Pico sesgado a la izquierda Function {Name:tfun3, TYPE:TRIANGULAR, Min:20, Max:40, Mode:35} ; Pico sesgado a la derecha
Example:
/* Triangular */ SYSTEM {TYPE:OPTIONS, Speed:5} Facility {NAME:VENTANILLA1,X:165,Y:184,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA2,X:343,Y:185,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} Facility {NAME:VENTANILLA3,X:535,Y:183,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:10} POSITION {NAME:POS1, X:250, Y:381} POSITION {NAME:POS2, X:423, Y:383} POSITION {NAME:POS3, X:566, Y:384} Function {Name:tfun1, TYPE:TRIANGULAR, Min:20, Max:40, Mode:30} Function {Name:tfun2, TYPE:TRIANGULAR, Min:20, Max:40, Mode:25} Function {Name:tfun3, TYPE:TRIANGULAR, Min:20, Max:40, Mode:35} START 500 GENERATE 10,0,0,0 {NAME:GEN1, X:91, Y:383} ; VENTANILLA 1 – Triángulo centrado ADVANCE 20,4 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$tfun1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS1} ; VENTANILLA 2 – Triángulo con pico a la izquierda ADVANCE 20,0 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$tfun2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS2} ; VENTANILLA 3 – Triángulo con pico a la derecha ADVANCE 20,0 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE FN$tfun3 RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 - + Función Poisson
La distribución Poisson modela la cantidad de eventos que ocurren en un intervalo de tiempo fijo, siempre que:
-
Los eventos ocurren independientemente.
-
La tasa media de ocurrencia (λ) es constante.
¿Cuándo usar Poisson?
-
Número de llamadas por minuto en un call center.
-
Llegadas de clientes a una tienda.
-
Errores de fabricación por día.
Parámetro:
λ(lambda): número medio esperado de eventos por intervalo.Por ejemplo, si λ = 3, en promedio habrá 3 eventos por unidad de tiempo, aunque puede haber 2, 4, 0, etc. La variabilidad está incluida en la distribución.
Relación con la distribución exponencial
-
Poisson cuenta cuántos eventos ocurren.
-
Exponencial mide el tiempo entre eventos.
Ambas están controladas por el mismo parámetro λ, y son complementarias:
Poisson(λ): Número de eventos por intervalo λ
Exponencial(λ): Tiempo entre eventos consecutivos 1 / λ¿Qué muestra este ejemplo?
Comparación visual de ambas distribuciones para 3 valores distintos de λ:
Function {Name:fPoisson1, TYPE:POISSON, LAMBDA:X$LAMBDA1} Function {Name:fPoisson2, TYPE:POISSON, LAMBDA:X$LAMBDA2} Function {Name:fPoisson3, TYPE:POISSON, LAMBDA:X$LAMBDA3} Function {Name:fexp1, TYPE:EXP, LAMBDA:X$LAMBDA1, b:0} Function {Name:fexp2, TYPE:EXP, LAMBDA:X$LAMBDA2, b:0} Function {Name:fexp3, TYPE:EXP, LAMBDA:X$LAMBDA3, b:0}Los resultados se visualizan en texto dinámico con la media acumulada:
Tendencia a λ = 3.0 → Media ≈ 3.0 Tendencia a λ = 0.25 → Media ≈ 0.25 Exp = 1 / λ = 0.333 → Media ≈ 0.333
Esta simulación sirve para entender visualmente cómo:
-
Poisson estabiliza el número de eventos hacia λ.
-
Exponencial estabiliza el tiempo entre eventos hacia 1 / λ.

Example:
/* Poisson */ SYSTEM {TYPE:OPTIONS,Speed:5} Graphic {NAME:pText1,Type:TEXT,X:309,Y:281,Text:"Media1"} Graphic {NAME:pText2,Type:TEXT,X:309,Y:238,Text:"Media2"} Graphic {NAME:pText3,Type:TEXT,X:308,Y:198,Text:"Media3"} Graphic {NAME:eText1,Type:TEXT,X:506,Y:280,Text:"Exp1"} Graphic {NAME:eText2,Type:TEXT,X:506,Y:238,Text:"Exp2"} Graphic {NAME:eText3,Type:TEXT,X:504,Y:196,Text:"Exp3"} POSITION {NAME:POS1,X:598,Y:395} INITIAL contador,0 INITIAL LAMBDA1,1/4 INITIAL iLAMBDA1,round(1/X$LAMBDA1,3) INITIAL pTotal1,0 INITIAL eTotal1,0 INITIAL LAMBDA2,3/4 INITIAL iLAMBDA2,round(1/X$LAMBDA2,3) INITIAL pTotal2,0 INITIAL eTotal2,0 INITIAL LAMBDA3,3 INITIAL iLAMBDA3,round(1/X$LAMBDA3,3) INITIAL pTotal3,0 INITIAL eTotal3,0 Function {Name:fPoisson1, TYPE:POISSON, LAMBDA:X$LAMBDA1} Function {Name:fPoisson2, TYPE:POISSON, LAMBDA:X$LAMBDA2} Function {Name:fPoisson3, TYPE:POISSON, LAMBDA:X$LAMBDA3} Function {Name:fexp1, TYPE:EXP, LAMBDA:X$LAMBDA1, b:0} Function {Name:fexp2, TYPE:EXP, LAMBDA:X$LAMBDA2, b:0} Function {Name:fexp3, TYPE:EXP, LAMBDA:X$LAMBDA3, b:0} START 2000 ;***************************************************** GENERATE 2,0,0,0 {NAME:GEN1,X:218,Y:395} SAVEVALUE contador,X$contador + 1 ; --- Acumulation Poisson --- SAVEVALUE pTotal1,X$pTotal1 + FN$fPoisson1 SAVEVALUE pMedia1, X$pTotal1 / X$contador SAVEVALUE pMediaRound1, round(X$pMedia1,3) SAVEVALUE pTotal2,X$pTotal2 + FN$fPoisson2 SAVEVALUE pMedia2, X$pTotal2 / X$contador SAVEVALUE pMediaRound2, round(X$pMedia2,3) SAVEVALUE pTotal3,X$pTotal3 + FN$fPoisson3 SAVEVALUE pMedia3, X$pTotal3 / X$contador SAVEVALUE pMediaRound3, round(X$pMedia3,3) ; --- Acumulation Exponentian --- SAVEVALUE eTotal1,X$eTotal1 + FN$fexp1 SAVEVALUE eMedia1, X$eTotal1 / X$contador SAVEVALUE eMediaRound1, round(X$eMedia1,3) SAVEVALUE eTotal2,X$eTotal2 + FN$fexp2 SAVEVALUE eMedia2, X$eTotal2 / X$contador SAVEVALUE eMediaRound2, round(X$eMedia2,3) SAVEVALUE eTotal3,X$eTotal3 + FN$fexp3 SAVEVALUE eMedia3, X$eTotal3 / X$contador SAVEVALUE eMediaRound3, round(X$eMedia3,3) move {name:pText1,text:"Tendencia a Lambda = X$LAMBDA1 --> X$pMediaRound1"} move {name:pText2,text:"Tendencia a Lambda = X$LAMBDA2 --> X$pMediaRound2"} move {name:pText3,text:"Tendencia a Lambda = X$LAMBDA3 --> X$pMediaRound3"} move {name:eText1,text:"Exp = 1/X$LAMBDA1 = X$iLAMBDA1 --> X$eMediaRound1"} move {name:eText2,text:"Exp = 1/X$LAMBDA2 = X$iLAMBDA2 --> X$eMediaRound2"} move {name:eText3,text:"Exp = 1/X$LAMBDA3 = X$iLAMBDA3 --> X$eMediaRound3"} ADVANCE 30,10 {TO:POS1} ENDGENERATE 1 -
- + Funciones tipo FDISTRIBUTION
Distribuciones personalizadas
El tipo
FDISTRIBUTIONpermite definir funciones de distribución completamente personalizadas mediante una expresión matemática, sin limitarse a fórmulas predefinidas comoGAUSS,EXPoTRIANGULAR.Estas funciones generan una tabla de distribución internamente, evaluando una expresión matemática en un rango determinado. Es ideal para representar distribuciones no estándar o variantes de las clásicas.
¿Cómo funciona?
GPSS-Plus construye una tabla de distribución basada en:
-
Una expresión matemática que define la forma de la función (como una campana, un triángulo, etc.)
-
Un rango de valores (
min,max) donde se evalúa dicha función -
Un número de
intervalsque determina la resolución de la tabla -
Parámetros opcionales (
A,B,C...) que puedes usar dentro de la fórmula
Una vez construida la tabla, la función actúa como cualquier otra distribución: se toma un valor aleatorio, se consulta la tabla y se devuelve el resultado correspondiente.
Sintaxis:
Function { Name: nombre, Type: FDISTRIBUTION, Expression: "fórmula", min: valorMinimo, max: valorMaximo, intervals: cantidad, A: valor, B: valor, ... }Ejemplo 1: Distribución gaussiana personalizada
Function { Name:gauss1, Type: FDISTRIBUTION, EXPRESSION: "(1 / (A * SQRT(2 * PI))) * EXP(-0.5 * ((X - B) / A)^2)", A: 2.3, B: 30, min: B - (3 * A), max: B + (3 * A), intervals: 100 }Este ejemplo crea una función tipo campana centrada en 30, con dispersión 2.3. Es equivalente a una gaussiana clásica, pero totalmente configurable.
Ejemplo 2: Distribución triangular definida por fórmula
Function { Name:tri1, Type: FDISTRIBUTION, EXPRESSION: "(1 / C) * (1 - ABS((X - B) / (C / 2)))", B: 25, C: 30, min: B - C / 2, max: B + C / 2, intervals: 100 }Esta función genera una distribución triangular con pico en 25, anchura total de 30, y base de [10, 40].
Detalles técnicos:
-
La variable
Xes el eje horizontal (dominio). -
La función se evalúa
intervalsveces entreminymax. -
La integral se normaliza automáticamente para comportarse como una distribución.
-
Todos los parámetros (
A,B,C, etc.) pueden ser expresiones.
Example:
/* FDistribution */ SYSTEM {TYPE:OPTIONS,Speed:5} Facility {NAME:VENTANILLA1,X:244,Y:190,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:20} Facility {NAME:VENTANILLA2,X:412,Y:188,E_BIN_start:5,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:20} POSITION {NAME:POS1,X:200,Y:387} POSITION {NAME:POS2,X:341,Y:381} POSITION {NAME:POS3,X:507,Y:380} ;GAUSSIANA Function {Name:tName1, type: FDISTRIBUTION, EXPRESSION:"(1 / (A * SQRT(2 * PI))) * EXP(-0.5 * ((X - B) / A)^2)", b:30, a: 2.3, min:B - (3 * A), max:B + (3 * A),intervals:100} ; TRIANGULAR B: centro del rango C: ancho total del rango Function {Name:tName2, A:0, B:25, C:30, D:0, type: FDISTRIBUTION, EXPRESSION:"(1 / C) * (1 - ABS((X - B) / (C / 2)))", min:B - C/2, max:B + C/2, intervals:100} START 1000 ;***************************************************** GENERATE 2,0,0,0 {NAME:GEN1,X:56,Y:319} ADVANCE 20,0 {TO:POS1} ADVANCE 30,10 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$tName1 RELEASE VENTANILLA1 ADVANCE 20,0 {TO:POS2} ADVANCE 20,10 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE FN$tName2 RELEASE VENTANILLA2 ADVANCE 20,0 {TO:POS3} ENDGENERATE 1 -
- + Funciones tipo MATH
Fórmulas matemáticas personalizadas
El tipo
MATHpermite definir funciones que se evalúan como fórmulas matemáticas directas, sin utilizar distribuciones ni tablas de valores precalculadas. Son útiles cuando el valor que necesitamos depende de variables de forma determinista o con una expresión algebraica.Este tipo de función no genera aleatoriedad. Simplemente toma los parámetros indicados en orden, los sustituye en la expresión y devuelve el resultado.
Sintaxis:
Function {Name:nombre, Type:MATH, Expression:"A + B * C"}Name: nombre identificador de la función.Type: debe serMATH.Expression: fórmula a evaluar, usando letras mayúsculas como variables (A, B, C...). Estas letras representan los parámetros pasados en orden.
¿Cómo se llama una función
MATH?Se utiliza como cualquier función
FN$, pero con parámetros entre paréntesis:FN$(nombre, valor_A, valor_B, ...)
Example:
/* Math */ Graphic {NAME:Text1,Type:TEXT,X:370,Y:312,Text:"Hello"} Function {Name:math1, type: MATH, EXPRESSION:"A * 2 + B"} START 1 ;***************************************************** GENERATE 1,0,0,1 {NAME:GEN1,X:56,Y:319} assign AAA,4 assign BBB,6 move {name:Text1,text:"Result: FN$(math1,P$AAA,P$BBB)"} ENDGENERATE 1
- + Definiendo las funciones
- + Season 10: Sistemas continuos
- + Sistema continuo dentro del discreto
Hasta ahora hemos visto cómo GPSS-Plus es, en su esencia, un motor de simulación de eventos discretos. Pero también es capaz de simular sistemas continuos, es decir, aquellos en los que los cambios ocurren de forma gradual a lo largo del tiempo.
¿Qué es un sistema continuo?
Un sistema continuo es aquel en el que los valores cambian sin interrupciones. Por ejemplo:
-
El nivel de un depósito que se va llenando.
-
La temperatura de un horno que se calienta.
-
La velocidad de un coche acelerando suavemente.
En estos casos no hay “saltos” puntuales como los de una cola o un cliente que entra o sale. El cambio ocurre de forma progresiva.
¿Y cómo simular eso en un entorno discreto?
La respuesta es: haciendo trampa, pero de forma inteligente. En lugar de simular un cambio constante y fluido, lo dividimos en pequeños pasos temporales, lo bastante rápidos como para que parezca continuo.
Es como el cine: cada fotograma es una imagen estática, pero al reproducirse 24 por segundo, vemos movimiento.¿Cómo se hace esto en GPSS-Plus?
Con un ajustes clave:
SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5}TIME_DECIMALS:1indica que el tiempo se mide con un decimal (0.1).SPEED:5hace que el sistema se actualice con una interpretación media. Del 0 que indica pausa a 10 que es el máximo de velocidad. La interpretación media (5) es que 10 instantes AC1 tandan aproximadamente 1 segundo. ConSPEED:2, 1 segundo equivale aproximadamente a 1 AC1.
El motor sigue siendo discreto. El tiempo no avanza por sí solo; avanza cuando se atiende una entidad o se dispara un evento. Lo que hacemos es generar muchos eventos pequeños, muy seguidos.
Ejemplo: Llenado de un depósito
Vamos a llenar un depósito con un caudal variable (por ejemplo, siguiendo una función seno para hacerlo más dinámico).
Para ello, usamos un timer, que lanza un bloque de código cada 0.1 unidades de tiempo. No genera transacciones ni estadísticas: solo ejecuta.
SYSTEM {TYPE:ON_TIMER, TRIGGER:llenado, INTERVAL: 0.1}Cada vez que se activa el
PROCEDURE, haremos esto:-
Calcular un caudal según una función oscilante, definida previamente con
FUNCTION TYPE:MATH. -
Añadir ese caudal al nivel actual del depósito.
-
Actualizar visualmente el nivel.
-
Mostrar el valor en pantalla.
-
Si el depósito se llena, detener la simulación.
En ese caso, cada ciclo calculaba el caudal y lo sumaba al nivel con una fórmula sencilla:
SAVEVALUE nivel, X$nivel + X$caudal * 0.1
Este método se llama método de Euler, y es la forma más simple de integración numérica.
Estima que el intervalo de tiempo entre AC1$ y AC1$ + 0.1 el depósito se va a llenar con la cantidad de caudal en el momento AC1$ multiplicado por el intervalo 0.1
En el siguiente paso, volverá a hacer el mismo cálculo, usando el nuevo valor del caudal en ese instante. Y así sucesivamente, sumando pequeñas cantidades como si fuera una suma de rectángulos: eso es, en esencia, una integral.
Example:
/* Sistema continuo dentro del discreto */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} SYSTEM {TYPE:ON_TIMER, TRIGGER:llenado, INTERVAL: 0.1} Graphic {NAME:aviso,Type:TEXT,X:291,Y:342,Text:"aviso"} Function {Name:fcCaudal, Type:Math, Expression:"0.6 + SIN(A) * 4"} INITIAL nivel, 0 INITIAL caudal, 1.2 INITIAL fase, 0 INITIAL constante, 0.6 include /library_graphics/speedometer.lib START 100 PROCEDURE PRE_RUN assign config,{title:"Depósito" ,x:100,y:60 ,width:100 ,height:180 ,min_value: 0 ,max_value: 100 ,"color":"#ff0000"} call deposito.speedometer.init,V$config assign config,{title:"Caudal" ,x:300,y:60 ,width:100 ,height:180 ,min_value: -10 ,max_value: 10 ,"color":"orange"} call caudal.speedometer.init,V$config TERMINATE_VE ENDPROCEDURE PROCEDURE llenado ; Oscilar caudal como una función del tiempo simulado ; SAVEVALUE caudal, X$constante + SIN(X$fase) * 4 SAVEVALUE caudal, FN$(fcCaudal,X$fase) ; Aumentamos la fase suavemente SAVEVALUE fase, X$fase + 0.1 ; Sumamos el caudal al nivel, según el intervalo de tiempo SAVEVALUE nivel, X$nivel + X$caudal * 0.1 ; Actualizamos visualmente la línea del depósito ; Valores redondeados para mostrar ASSIGN tCaudal, round(X$caudal, 2) ASSIGN tNivel, round(X$nivel, 2) CALL deposito.speedometer.set, P$tNivel CALL caudal.speedometer.set, P$tCaudal ; Visualización del estado IF (X$nivel>=100) MOVE {name:aviso, text:"¡DEPÓSITO LLENO!"} STOP ELSE MOVE {name:aviso, text:"Nivel: P$tNivel - Caudal: P$tCaudal"} ENDIF TERMINATE ENDPROCEDURE 1 -
- + Recolección de datos PLOT
En el capítulo anterior vimos cómo GPSS-Plus puede simular comportamientos aparentemente continuos mediante el uso de
TIMERsy pasos de tiempo muy pequeños. Observamos, por ejemplo, cómo se llenaba un depósito en pantalla, simulando un proceso constante.Ahora vamos un paso más allá:
No solo vamos a ver lo que ocurre… vamos a registrarlo y graficarlo automáticamente para su análisis posterior.Porque, en muchos casos, no basta con observar cómo se mueve algo: necesitamos tener una curva, un gráfico, un historial del comportamiento.
Para eso existe en GPSS-Plus el sistema de trazado de datos:PLOTTERyPLOT-
PLOTTER {}: declara una tabla gráfica donde se irán guardando valores. -
PLOT: añade un punto a esa tabla, usando el tiempo actual u otra variable como eje X.
Cada punto añadido es como un “fotograma” del sistema, y al terminar la simulación, GPSS-Plus dibuja una curva con todos los puntos registrados.
Ejemplo de uso
En nuestro caso vamos a registrar:
PLOTTER {NAME:thePlot, Y_0:nivel, Y_1:caudal, X:TIME_AC1}Esto significa:
-
Vamos a graficar dos series de valores:
nivelycaudal. -
El eje horizontal (X) será el tiempo (
AC1$), llamadoTIME_AC1.
Para añadir puntos en cada instante:
PLOT thePlot, X$nivel, X$caudal
Esto se ejecuta dentro del
PROCEDURE, en cada llamada, y va dibujando la historia del proceso."NIVEL se obtiene acumulando el CAUDAL. El sistema simula una integración continua."
"Cada punto corresponde a un instante generado automáticamente por el TIMER."
Example:
/* Recolección de datos PLOT */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} SYSTEM {TYPE:ON_TIMER, TRIGGER:llenado, INTERVAL: 0.1} PLOTTER {NAME:thePlot, Y_0:nivel, Y_1:caudal, X:TIME_AC1} Graphic {NAME:aviso,Type:TEXT,X:291,Y:342,Text:"aviso"} Function {Name:fcCaudal, Type:Math, Expression:"0.6 + SIN(A) * 4"} INITIAL nivel, 0 INITIAL caudal, 1.2 INITIAL fase, 0 include /library_graphics/speedometer.lib START 100 PROCEDURE PRE_RUN assign config,{title:"Depósito" ,x:100,y:60 ,width:100 ,height:180 ,min_value: 0 ,max_value: 100 ,"color":"#ff0000"} call deposito.speedometer.init,V$config assign config,{title:"Caudal" ,x:300,y:60 ,width:100 ,height:180 ,min_value: -10 ,max_value: 10 ,"color":"orange"} call caudal.speedometer.init,V$config TERMINATE_VE ENDPROCEDURE PROCEDURE llenado ; Oscilar caudal como una función del tiempo simulado SAVEVALUE caudal, FN$(fcCaudal,X$fase) ; Aumentamos la fase SAVEVALUE fase, X$fase + 0.1 ; Sumar caudal al nivel SAVEVALUE nivel, X$nivel + X$caudal * 0.1 ; Registrar los datos en el ploter PLOT thePlot, X$nivel, X$caudal ; Mostrar valores redondeados ASSIGN tCaudal, round(X$caudal, 2) ASSIGN tNivel, round(X$nivel, 2) ; Actualizar visualmente el nivel en pantalla CALL deposito.speedometer.set, P$tNivel CALL caudal.speedometer.set, P$tCaudal IF (X$nivel>=100) MOVE {name:aviso, text:"¡DEPÓSITO LLENO!"} STOP ELSE MOVE {name:aviso, text:"Nivel: P$tNivel - Caudal: P$tCaudal"} ENDIF TERMINATE ENDPROCEDURE 1 -
- + Mejora de resultados con INTEGRATE
En los capítulos anteriores vimos cómo GPSS-Plus permite simular sistemas con comportamiento aparentemente continuo gracias a la ejecución frecuente de procedimientos temporizados (
TIMER) y el uso deSAVEVALUEpara acumular valores como el llenado de un depósito.Hasta ahora usábamos una fórmula simple para simular el llenado:
SAVEVALUE nivel, X$nivel + X$caudal * 0.1
Este método es efectivo, pero básico. Asume que el caudal es constante durante cada intervalo de tiempo, lo cual no es del todo cierto si el caudal varía rápidamente, por ejemplo, con una función seno como es el caso.
Y cuando hablamos de intervalo, en este caso hablamos de ese "0.1". No es lo mismo SIN(0) que SIN(0.1).Y si queremos una estimación más precisa del valor medio, probablemente sería mejor usar
SIN(0.05), es decir, el punto central del intervalo.¿Qué ocurre si el caudal varía durante el paso de tiempo?
Cuando el valor que estás acumulando cambia dentro del mismo intervalo, el sistema no es perfectamente exacto: estás sumando un valor medio aproximado, no el real.
Para mejorar esto, GPSS-Plus incorpora el bloque
INTEGRATE, que utiliza un método de integración numérica llamado Runge-Kutta de cuarto orden (RK4) para calcular una estimación mucho más precisa.¿Qué hace INTEGRATE?
INTEGRATE { EXPRESSION: "SIN(T) + 2", DT: 0.1, SAVEVALUE: caudal_RK4 }Este bloque:
-
Evalúa la expresión en cuatro puntos clave del intervalo: al inicio (
X), dos veces en el punto medio (X + DT/2), y al final (X + DT). -
Aplica el método de Runge-Kutta de cuarto orden (RK4), combinando esos valores con pesos específicos para estimar con precisión la variación de la función en ese tramo.
-
Guarda el resultado en el
SAVEVALUEindicado, como mejor estimación del valor medio de la expresión en ese intervalo.
El valor resultante será una mejor estimación del caudal medio en ese intervalo de tiempo, y lo podemos usar para llenar el depósito con más precisión.
Comparando el método tradicional (Euler) y RK4
Vamos a construir un ejemplo que utiliza ambos métodos en paralelo:
-
caudal: usando el método simple -
caudal_RK4: usando integración numérica RK4 -
nivel: acumulado con el caudal clásico -
nivel_RK4: acumulado con el caudal RK4
Además, graficaremos las 4 curvas usando
PLOTTERpara comparar visualmente los resultados.¿Qué verás en la gráfica?
-
nivel_RK4sube ligeramente más suavemente y más rápido quenivel, porque tiene en cuenta que el caudal crece dentro del intervalo. -
caudal_RK4se ajusta mejor a los picos y valles quecaudal, que solo calcula un punto. -
La línea blanca en pantalla (nivel RK4) va un poco por delante de la línea azul (nivel simple).
¿Cuándo es válido usar RK4?
El método Runge-Kutta de cuarto orden (RK4), que implementa el bloque
INTEGRATEen GPSS-Plus, es un algoritmo numérico diseñado para resolver ecuaciones diferenciales ordinarias de la forma:dy/dt = f(t)
Y lo hace suponiendo que la función
f(t)es continua y suave en el intervalo que se está integrando.Pero… GPSS-Plus es un sistema de eventos discretos
Esto significa que hay muchas variables (
X$nivel,X$entidadesEnCola,X$facilidad, etc.) que pueden cambiar bruscamente, sin continuidad ni suavidad.Esos cambios dependen de eventos que se disparan cuando otras entidades llegan, bloquean recursos, o terminan.
Por tanto:
No se debe usar INTEGRATE con expresiones que dependan de elementos del sistema discreto.
INTEGRATE con RK4 es una herramienta potente y precisa, siempre que se utilice con funciones puramente matemáticas. No es una simulación mágica del futuro: es un estimador inteligente de una función bien definida.
Example:
/* Mejora de resultados con INTEGRATE */ SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} SYSTEM {TYPE:ON_TIMER, TRIGGER:llenado, INTERVAL: 0.1} PLOTTER {NAME:thePlot, Y_0:nivel, Y_1:caudal,X:TIME_AC1} PLOTTER {NAME:thePlot_RK4, Y_0:nivel, Y_1:caudal,X:TIME_AC1} PLOTTER {NAME:thePlot_ALL, Y_0:nivel, Y_1:caudal, Y_2:nivel_RK4, Y_3:caudal_RK4,X:TIME_AC1} Graphic {NAME:aviso,Type:TEXT,X:291,Y:342,Text:"aviso"} Graphic {NAME:aviso_RK4,Type:TEXT,X:291,Y:302,Text:"Aviso2"} Graphic {NAME:Cubo1,Type:LINE,POINTS:"[100,100],[100,500],[200,500],[200,100]" , Close:1 , color:#00FFFF , Fcolor:#FFFFFF} Graphic {NAME:Line1,Type:LINE,fcolor:#FF6666, X1:102,Y1:100,X2:198,Y2:100} Graphic {NAME:Line_RK4,Type:LINE,color:#333300, X1:98,Y1:100,X2:202,Y2:100} INITIAL nivel, 0 INITIAL caudal, 1.2 INITIAL nivel_RK4, 0 INITIAL caudal_RK4, 1.2 INITIAL fase, 0 INITIAL constante, 0.6 START 100 ;***************************************************** PROCEDURE llenado ; Oscilar caudal como una función del tiempo simulado SAVEVALUE caudal, X$constante + SIN(X$fase) * 4 ; Aumentamos la fase suavemente SAVEVALUE fase, X$fase + 0.1 ; Integración continua del nivel INTEGRATE { EXPRESSION: "X$constante + SIN(T) * 4", METHOD: RK4, DT: 0.1, SAVEVALUE: caudal_RK4 } SAVEVALUE nivel, X$nivel + X$caudal * 0.1 SAVEVALUE nivel_RK4, X$nivel_RK4 + X$caudal_RK4 * 0.1 PLOT thePlot,X$nivel,X$caudal PLOT thePlot_RK4,X$nivel_RK4,X$caudal_RK4 PLOT thePlot_ALL,X$nivel,X$caudal,X$nivel_RK4,X$caudal_RK4 MOVE {NAME:Line1, X1:98,Y1:(100+X$nivel*4) ,X2:202,Y2:(100+X$nivel*4)} MOVE {NAME:Line_RK4, X1:98,Y1:(100+X$nivel_RK4*4) ,X2:202,Y2:(100+X$nivel_RK4*4)} ASSIGN tCaudal, round(X$caudal, 2) ASSIGN tNivel, round(X$nivel, 2) ASSIGN tCaudal_RK4, round(X$caudal_RK4, 2) ASSIGN tNivel_RK4, round(X$nivel_RK4, 2) ; Visualización del estado IF (X$nivel>=100) MOVE {name:aviso, text:"¡DEPÓSITO LLENO!"} stop ELSE MOVE {name:aviso, text:"Nivel: P$tNivel - Caudal: P$tCaudal"} MOVE {name:aviso_RK4, text:"Nivel: P$tNivel_RK4 - Caudal: P$tCaudal_RK4"} ENDIF TERMINATE ENDPROCEDURE 1 -
- + Movimiento con aceleración constante
Este ejemplo muestra cómo simular el movimiento de un vehículo en un circuito circular utilizando una aceleración constante. Es el primer paso hacia la construcción de modelos físicos simples, como los que se emplean en videojuegos o simulaciones básicas de sistemas mecánicos.
¿Qué se simula?
-
El coche comienza detenido (velocidad 0).
-
Se le aplica una aceleración constante positiva hasta alcanzar una velocidad máxima (en este caso, 4 radianes por segundo).
-
Al llegar a ese límite, se invierte la aceleración para que el coche frene suavemente hasta una velocidad mínima (0.2 rad/s).
-
Luego vuelve a acelerar... y el ciclo se repite.
¿Cómo se calcula?
Se emplea el bloque
INTEGRATEpara sumar la aceleración en cada paso de tiempo:INTEGRATE {EXPRESSION: X$aceleracion, DT: 0.1, SAVEVALUE: deltaVel}En este caso, al ser una aceleración constante:
deltaVel = X$aceleracion * 0.1 deltaVel = ±0.01 × 0.1 = ±0.001
Esto nos da el incremento de velocidad en ese intervalo, y luego simplemente se acumula:
SAVEVALUE velocidad, X$velocidad + X$deltaVel
Resultado visual y gráfico
-
El coche se mueve suavemente en la pista circular, ganando y perdiendo velocidad.
-
El gráfico resultante (
PLOTTER) muestra dos curvas:-
Aceleración: una onda cuadrada que alterna entre +0.01 y -0.01.
-
Velocidad: una onda triangular que sube y baja en respuesta a la aceleración.
-
Este comportamiento es el típico de un sistema con control básico de velocidad, y es una base para la aceleración variable, resistencia, o control adaptativo.
Example:
/* Movimiento con aceleración constante */ SYSTEM {type:OPTIONS, TIME_DECIMALS:2, SPEED:5} SYSTEM {TYPE:ON_TIMER, TRIGGER:moverCoche, INTERVAL: 0.01} ; --- Variables iniciales --- INITIAL velocidad, 0.0 ; Velocidad angular INITIAL angulo, 0 ; Posición angular (en radianes) INITIAL aceleracion, 0.01 ; Aceleración angular constante INITIAL radio, 200 ; Radio del circuito circular ; --- Funciones gráficas --- Graphic {NAME:txtVel, Type:TEXT, X:510, Y:120, TEXT:"Velocidad:"} Graphic {NAME:coche, Type:LINE, X1:-10, Y1:-10, X2:-10, Y2:10, X3:10, Y3:10, X4:10, Y4:-10, COLOR:#FF0000, close:1} Graphic {NAME:pista, Type:ARC, X:300, Y:300, RADIUS:X$radio, CLOSE:0, COLOR:#999999} ; --- Gráfica de evolución --- PLOTTER {NAME:curva, Y_0:aceleracion, Y_1:velocidad,X:TIME} START 500 ; --- Procedimiento de movimiento --- PROCEDURE moverCoche IF (X$velocidad >= 4) SAVEVALUE aceleracion, -0.1 ; Empieza a frenar endif if (X$velocidad <= 0.2) SAVEVALUE aceleracion, 0.1 ; Vuelve a acelerar ENDIF ; Calcular incremento de velocidad INTEGRATE {EXPRESSION: X$aceleracion, DT: 0.01, SAVEVALUE: deltaVel} ; Acumular en velocidad total SAVEVALUE velocidad, X$velocidad + X$deltaVel ; Sumar velocidad al ángulo SAVEVALUE angulo, X$angulo + X$velocidad * 0.05 ; Calcular posición ASSIGN rad, X$angulo ASSIGN posX, 300 + X$radio * COS(P$rad) ASSIGN posY, 300 + X$radio * SIN(P$rad) MOVE {NAME:coche, X:P$posX, Y:P$posY} ASSIGN tVel, round(X$velocidad, 2) MOVE {NAME:txtVel, TEXT: "Velocidad: P$tVel rad/s"} PLOT curva, X$aceleracion, X$velocidad TERMINATE ENDPROCEDURE -
- + Movimiento con aceleración variable
En este ejemplo damos un paso más en la simulación de movimiento circular, haciendo que la aceleración del vehículo evolucione de forma dinámica.
Hasta ahora habíamos utilizado una aceleración constante o un cambio inmediato entre aceleración positiva y negativa. Sin embargo, en el mundo real, un coche acelera poco a poco, y frena con más fuerza, sobre todo si deja de acelerar y retiene motor. Eso es lo que queremos modelar aquí.
¿Qué modelamos?
Simulamos un vehículo que:
-
Acelera lentamente cuando parte desde velocidad cero.
-
Frena más bruscamente cuando alcanza una velocidad alta.
-
Circula por una pista circular.
-
Muestra gráficamente su posición y velocidad angular.
-
Registra la evolución en dos gráficas: aceleración y velocidad.
¿Qué elementos intervienen?
-
aceleracion: valor actual de aceleración angular. -
deltaA: ritmo de cambio de la aceleración (puede ser positivo o negativo). -
INTEGRATE: calcula cuánto cambia la velocidad con la aceleración actual. -
velocidad: cambia suavemente en función de la aceleración. -
angulo: se incrementa según la velocidad, generando el movimiento. -
coche: se mueve sobre la pista en función del ángulo. -
PLOTTER: representa cómo varían la aceleración y la velocidad a lo largo del tiempo.
¿Cómo se gestiona la aceleración?
-
Mientras la velocidad es baja, el sistema incrementa poco a poco la aceleración (
deltaApositivo y suave). -
Cuando la aceleración supera un umbral (por ejemplo, 0.04), se invierte el signo de
deltaAy se frena rápidamente. -
Al llegar a velocidad cero, se reinicia el ciclo: se corta la aceleración, se resetea
velocidad, y se vuelve a acelerar.
De esta forma se obtiene un patrón cíclico muy natural, parecido al de un motor térmico: aceleración progresiva y frenado más brusco.
Resultados gráficos
-
La aceleración forma una curva en dientes de sierra: sube lentamente, y cae rápidamente.
-
La velocidad sigue una forma suave y ondulada: acelera poco a poco y baja más rápido.
-
El coche cambia de color: verde cuando acelera, rojo cuando frena.
Example:
/* Movimiento con aceleración variable */ SYSTEM {type:OPTIONS, TIME_DECIMALS:2, SPEED:6} SYSTEM {TYPE:ON_TIMER, TRIGGER:moverCoche, INTERVAL: 0.1} ; --- Variables iniciales --- INITIAL velocidad, 0.0 ; Velocidad angular INITIAL angulo, 0 ; Posición angular (en radianes) INITIAL aceleracion, 0.01 ; Aceleración angular INITIAL radio, 200 ; Radio del circuito circular INITIAL deltaA, 0.0002 ; --- Funciones gráficas --- Graphic {NAME:txtVel, Type:TEXT, X:510, Y:120, TEXT:"Velocidad:"} Graphic {NAME:coche, Type:LINE, X1:-10, Y1:-10, X2:-10, Y2:10, X3:10, Y3:10, X4:10, Y4:-10, COLOR:green, close:1} Graphic {NAME:pista, Type:ARC, X:300, Y:300, RADIUS:X$radio, CLOSE:0, COLOR:#999999} ; --- Gráfica de evolución --- PLOTTER {NAME:curva, Y_0:aceleracion, Y_1:velocidad,X:TIME} START 500 PROCEDURE moverCoche ;------------------------------- ; AJUSTE SUAVE DE LA ACELERACIÓN ;------------------------------- ; Control: si velocidad muy alta → reducir aceleración poco a poco IF (X$aceleracion > 0.04) SAVEVALUE deltaA, -0.003 SAVEVALUE aceleracion, 0.04 MOVE {name: coche,color:red} ENDIF IF (X$velocidad <= 0.0) SAVEVALUE deltaA, 0.0002 SAVEVALUE aceleracion, 0 SAVEVALUE velocidad, 0.0 MOVE {name: coche,color:green} ENDIF ;--------------------------------- ; ACTUALIZAR VELOCIDAD Y POSICIÓN ;--------------------------------- ; Modificar aceleración suavemente según deltaA SAVEVALUE aceleracion, X$aceleracion + X$deltaA INTEGRATE {EXPRESSION: X$aceleracion, DT: 0.1, SAVEVALUE: deltaVel} SAVEVALUE velocidad, X$velocidad + X$deltaVel ; Actualizar ángulo (posición) según velocidad angular SAVEVALUE angulo, X$angulo + X$velocidad * 0.1 ;-------------------------------- ; CALCULAR POSICIÓN Y MOVER COCHE ;-------------------------------- ASSIGN rad, X$angulo ASSIGN posX, 300 + X$radio * COS(P$rad) ASSIGN posY, 300 + X$radio * SIN(P$rad) MOVE {NAME:coche, X:P$posX, Y:P$posY} ;-------------------------- ; MOSTRAR ESTADO Y PLOTTERS ;-------------------------- ASSIGN tVel, round(X$velocidad, 2) ASSIGN tAcel, round(X$aceleracion, 4) MOVE {NAME:txtVel, TEXT: "Velocidad: P$tVel rad/s \n Aceleración: P$tAcel"} ; Gráficas para análisis PLOT curva, X$aceleracion, X$velocidad TERMINATE ENDPROCEDURE -
- + Simulación híbrida
En los capítulos anteriores vimos cómo simular el llenado de un depósito con funciones continuas, cómo registrar su evolución con gráficos (PLOTTER) y cómo mejorar la precisión usando integración numérica (INTEGRATE con RK4). Ahora es el momento de integrar todo ese conocimiento en un sistema realista y complejo, en el que lo continuo y lo discreto conviven.
Ejemplo: estación solar con usuarios conectados
Este ejemplo representa un sistema híbrido en el que:
-
Hay una fuente de energía solar (modelo continuo)
-
Hay usuarios discretos que llegan, deciden cargar y se conectan si lo necesitan
Parte continua: generación solar
La energía solar se modela como una función senoidal que simula el paso del día: una oscilación desde 0 hasta 1.5, a lo largo de 1440 minutos (24 horas). Cada unidad de tiempo representa un minuto, y cada ciclo de TIMER añade energía a la batería.
INTEGRATE { EXPRESSION: "0.75 + 0.75 * SIN((T / 1440) * 6.2832)", DT: 1, SAVEVALUE: caudalSolar }Esta expresión genera una onda suave con un máximo de 1.5 y un mínimo de 0, centrada en 0.75. El resultado se suma al nivel de batería hasta un máximo de 100.
Además, un PLOTTER recoge los datos en cada ciclo:
PLOTTER {NAME:bateriaPlot, Y_0:nivelBateria, Y_1:caudalSolar, X:TIME_AC1}Así se podrá ver la evolución de la batería y el caudal solar durante todo el día.
Parte discreta: usuarios que solicitan carga
Mientras tanto, los usuarios llegan de forma aleatoria usando
GENERATE. Cada uno decide si necesita cargar su batería, usando una función de tipo Poisson para modelar la decisión:Function {Name:decisionCarga, TYPE:POISSON, LAMBDA:1/3}Si deciden cargar:
-
Se mueven hasta el punto de carga.
-
Se conectan al recurso
RESTROOM cargador, que simula un sistema de carga simultánea. -
Permanecen dentro del
RESTROOM, mientras la batería central les transfiere energía (si tiene suficiente). -
Cuando alcanzan su nivel de carga requerido (
usoPorCarga), son liberados automáticamente medianteWAKE.
Coordinación de ambos mundos
Cada vez que se ejecuta el ciclo de carga (
cicloSolar):-
Se calcula el nuevo caudal solar.
-
Se aumenta el nivel de batería con ese caudal.
-
Se recorre la lista de usuarios conectados (
FOREACH) y se les transfiere carga si hay energía disponible. -
Si un usuario ya ha sido cargado completamente, se libera del recurso.
Visualmente, todo esto se representa con:
-
Un depósito que sube y baja según el nivel de batería.
-
Un arco que representa la intensidad solar actual.
-
Un gráfico de evolución con los datos recolectados en cada paso.
Visualización e informe final
Al finalizar la simulación, el gráfico
bateriaPlotmuestra la evolución de:-
Nivel de batería (serie Y_0)
-
Caudal solar (serie Y_1)
Se puede observar cómo:
-
La batería se recarga durante el día y se vacía durante la noche.
-
Si hay muchos usuarios conectados, la batería puede agotarse antes de que vuelva a salir el sol.
-
El número de usuarios simultáneos conectados se puede monitorizar con un contador clásico (por ejemplo,
TABULATE cargadorsi se desea).
Conclusión
Este tipo de simulación es lo que se denomina un modelo híbrido continuo/discreto. Combina:
-
Una evolución continua del entorno (como el sol)
-
Una lógica discreta de eventos, decisiones y ocupación de recursos (usuarios)
Este tipo de modelado es ideal para simular:
-
Energía y redes eléctricas
-
Producción intermitente y consumo variable
-
Procesos biológicos o químicos
-
Infraestructuras compartidas con restricciones
Example:
/* Simulación híbrida */ SYSTEM {type:OPTIONS, TIME_DECIMALS:0, SPEED:5} ; Tiempo con dos decimales y simulación visual lenta SYSTEM {TYPE:ON_TIMER, TRIGGER:cicloSolar, INTERVAL: 1} ; Ejecutar procedimiento 'cicloSolar' cada 1 unidad de tiempo ;--- Gráficas de resultados --- PLOTTER {NAME:bateriaPlot, Y_0:nivelBateria, Y_1:caudalSolar, X:TIME_AC1} ; Curvas: nivel batería y caudal solar ;--- Función aleatoria de decisión para usuarios --- Function {Name:decisionCarga, TYPE:POISSON, LAMBDA:1/4} ; Probabilidad de decidir cargar batería ;--- Posiciones gráficas --- Position {NAME:Pos1,X:431,Y:511} ; Entrada al punto de carga Position {NAME:Pos2,X:690,Y:510} ; Salida Position {NAME:PosRecarga,X:578,Y:173} ; Punto de recarga (visual) ;--- Recurso de recarga de usuarios --- Restroom {NAME:Cargador,X:555,Y:360,R_BIN_SIZE:1,R_BIN_COUNT:40} ; Permite 40 unidades de carga concurrentes ;--- Indicadores visuales --- Graphic {NAME:tNivelBateria,Type:TEXT,X:329,Y:305,Text:"tNivel"} ; Texto: nivel batería Graphic {NAME:gNivelCaudal,TYPE:ARC,X:411,Y:173, fCOLOR:#FFFF99,RADIUS:50,START_ANGLE:0,END_ANGLE:45,CLOSE:1} ; Semicírculo: intensidad solar Graphic {NAME:tCaudal,Type:TEXT,X:411,Y:173,Text:"tCaudal"} ; Texto: valor de caudal Graphic {NAME:Cubo1,Type:LINE ,POINTS:"[100,100],[100,500],[ 200,500],[200,100]" ,Close:1,fcolor:#666666} ; Depósito batería Graphic {NAME:Line1,Type:LINE,color:#00FFFF, X1:98,Y1:100,X2:202,Y2:100} ; Línea de nivel de batería ;--- Variables iniciales --- INITIAL nivelBateria, 50 INITIAL caudalSolar, 0 INITIAL usoPorCarga, 15 START 2000 ;============================== ; PROCEDIMIENTO CICLO SOLAR ;============================== PROCEDURE cicloSolar ; Caudal solar: función sinusoidal normalizada entre 0 y 1.5 INTEGRATE { EXPRESSION: "0.75 + 0.75 * SIN((T / 1440) * 6.2832)", DT: 1, SAVEVALUE: caudalSolar } ; Incrementar batería (con límite 100) SAVEVALUE nivelBateria, MIN(100, X$nivelBateria + X$caudalSolar) ; Recorrer entidades conectadas al cargador FOREACH NUMERO,IN_RESOURCE,Cargador if (X$nivelBateria>1) ; Aumentar batería interna del usuario assign actual,P$(bateria,P$NUMERO) + 0.5 assign bateria,P$actual,P$NUMERO ; Restar batería del sistema savevalue nivelBateria,X$nivelBateria - 0.5 ; Si ya tiene batería suficiente, liberar al usuario if (P$actual>X$usoPorCarga) wake Cargador,0,P$NUMERO endif endif ENDFOREACH ; Gráfico solar: arco proporcional al caudal ASSIGN anguloSol, round((X$caudalSolar / 1.5) * 360, 1) MOVE {NAME: gNivelCaudal, END_ANGLE: P$anguloSol} ; Actualizar línea visual del nivel de batería MOVE {NAME:Line1, X1:98,Y1:(100+X$nivelBateria*4) ,X2:202,Y2:(100+X$nivelBateria*4)} ; Mostrar valores redondeados assign tnivelBateriaRound,round(X$nivelBateria,2) assign tCaudalRound,round(X$caudalSolar,2) move {name:tNivelBateria,text:"Nivel actual: P$tNivelBateriaRound"} move {name:tCaudal,text:"Caudal: P$tCaudalRound / 1.5"} ; Guardar datos para informe PLOT bateriaPlot, X$nivelBateria, X$caudalSolar TERMINATE ENDPROCEDURE 1 ;============================== ; USUARIOS ;============================== GENERATE 5,5 {NAME:userGen, X:294, Y:514, ECOLOR:#000000} ; Llega un usuario cada ~5 unidades assign bateria,X$usoPorCarga ; Define su necesidad de carga ASSIGN decision, FN$decisionCarga ; Decide si necesita recargar (Poisson) ADVANCE 10 {to:Pos1} ; Tiempo de conexión IF (P$decision>=1) assign bateria,0 ; Inicializa contador de carga ADVANCE 10 {to:Cargador} ; Se mueve al punto de carga rest Cargador ; Espera a estar cargado ENDIF ADVANCE 10 {to:Pos2} ; Sale TERMINATE 1 -
- + Sistema continuo dentro del discreto
- + Season 11: Sistemas No Lineales
- + Sistemas No Lineales
- + Sistemas No Lineales
¿Qué es un sistema no lineal?
Los sistemas lineales son aquellos que se resuelven con ecuaciones proporcionales y directas: si duplicas la entrada, se duplica la salida. Un ejemplo clásico es:
El padre tiene el doble de edad que su hijo, y el hijo es 20 años menor que el padre.
Este tipo de sistemas se resuelven paso a paso, de forma secuencial o lineal.
Pero en la realidad, muchos sistemas son no lineales, es decir, las variables están tan interrelacionadas que no pueden resolverse por separado. Requieren ser resueltas simultáneamente.
Ejemplo: Depósitos de agua unidos por un tubo
Supongamos dos depósitos de agua, uno con 10 litros y otro con 5 litros, unidos por un tubo.
Podríamos escribir:
volumen_A_Nuevo = volumen_A - flujo * DT ; DT es el incremento de tiempo volumen_B_Nuevo = volumen_B + flujo * DT flujo = K * (volumen_A - volumen_B) ; K es una constante sobre la capacidad de fluir del tubo
Donde:
Kes una constante que define la permeabilidad del tuboDTes el paso de tiempo (delta t)
Esto puede funcionar bien para dos depósitos. Pero si conectamos un tercer depósito en serie, el sistema ya no responde correctamente. A veces, el depósito central parece no fluir hacia el tercero, a pesar de tener diferencia de presión. Si intentamos ver la cantidad de flujo en el instante 0 entre el segundo y tercer depósito sería 0 mientras que en realidad, sí hay flujo.
Eso se debe a que las ecuaciones están acopladas. Resolverlas por separado no funciona.
Resolver sistemas no lineales
La solución es tratarlos como un conjunto de ecuaciones no lineales y resolverlas todas juntas.
GPSS-Plus automatiza esto mediante el recurso
DINAMICque en cierto modo se parece a una Facility pero en lugar de gestionar entidades y colas, gestiona valores matemáticos.Este recurso implementa:
- Matrices Jacobianas (para linealizar el sistema en cada iteración)
- Método de Newton-Raphson (para encontrar la solución iterativamente)
Declaración típica:
INITIAL dynamic_config, { EXPRESSIONS: [ "PIPE_FLUJO + PIPE_K * (TANK1_PRESION - TANK2_PRESION)", "TANK1_PRESION - TANK1_PRESION_PREV - PIPE_FLUJO * DT", "TANK2_PRESION - TANK2_PRESION_PREV + PIPE_FLUJO * DT" ], STATES: ["PIPE_FLUJO", "TANK1_PRESION", "TANK2_PRESION"], VARIABLES: ["PIPE_K", "TANK1_PRESION_PREV", "TANK2_PRESION_PREV"] } INITIAL dynamic_values, { PIPE_K: 0.1, TANK1_PRESION_PREV: 10, TANK2_PRESION_PREV: 1 } DYNAMIC { name: sys, CONFIG: V$dynamic_config, VALUES: V$dynamic_values, X: 300, Y: 300, TOLERANCE: 1e-6, ; valor por defecto MAX_ITER: 10 ; valor por defecto }El bloque
DYNAMICpermite declarar:EXPRESSIONS: las ecuaciones del sistemaSTATES: variables a resolver (como presión, velocidad, temperatura)VARIABLES: parámetros auxiliares (constantes o valores anteriores)
El sufijo
_PREVen las variables se gestiona automáticamente: GPSS-Plus actualiza su valor en cada iteración.Resolución con
SOLVE:SOLVE { name: "sys", DT: 0.1, SAVEVALUE: "resultado" }Ejecución típica:
PROCEDURE agente.init timeout cambiar_deposito, 10 ; si se desea cambiar algún parámetro en tiempo de ejecución while (1==1) SOLVE { name: "sys", DT: 0.1, SAVEVALUE: "resultado" } SAVEVALUE TANK1_PRESION, X$(resultado.TANK1_PRESION) SAVEVALUE TANK2_PRESION, X$(resultado.TANK2_PRESION) SAVEVALUE PIPE_FLUJO, X$(resultado.PIPE_FLUJO) PLOT presiones, X$TANK1_PRESION, X$TANK2_PRESION PLOT flujo, X$PIPE_FLUJO IF (ABS(X$PIPE_FLUJO) < 0.001) stop ENDIF advance 0.1, 0 endwhile stop ENDPROCEDUREEventualmente, se pueden alterar los valores de
VARIABLEScon el uso deDYNAMIC_SET:assign nuevosParams,{TANK2_PRESION_PREV:10} dynamic_set sys,V$nuevosParamsEn la sección del depuración se peude observar cómo cambian los valores de
STATESy la configuración completa delDYNAMIC.El resultado del
PLOTTERes esclarecedor y muestra claramente cómo se equilibran los niveles de los depósitos con el paso del tiempo.En resumen
- En sistemas acoplados, como el flujo entre múltiples depósitos, necesitamos resolver ecuaciones simultáneamente.
DYNAMICpermite modelar esos sistemas físicos con expresiones simples.- GPSS-Plus automatiza la actualización de estados, la integración en el tiempo, y el control de convergencia.
Con esto, puedes modelar fácilmente fenómenos como:
- Equilibrio hidráulico
- Transferencia de calor
- Corriente eléctrica
- Sistemas acoplados de cualquier tipo
Example:
/* Sistemas No Lineales */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} PLOTTER {NAME:presiones, Y_0:tank1, Y_1:tank2, X:TIME_AC1} PLOTTER {NAME:flujo, Y_0:flujo, X:TIME_AC1} Graphic {NAME:tTexto,Type:TEXT,X:327,Y:486,Text:"tTexto"} ; Texto: nivel batería INITIAL TANK1_PRESION, 10 INITIAL TANK2_PRESION, 1 INITIAL K, 0.1 INITIAL dynamic_config, { EXPRESSIONS: [ "PIPE_FLUJO + PIPE_K * (TANK1_PRESION - TANK2_PRESION)", "TANK1_PRESION - TANK1_PRESION_PREV - PIPE_FLUJO * DT", "TANK2_PRESION - TANK2_PRESION_PREV + PIPE_FLUJO * DT" ], STATES: [ "PIPE_FLUJO", "TANK1_PRESION", "TANK2_PRESION" ], VARIABLES: [ "PIPE_K", "TANK1_PRESION_PREV", "TANK2_PRESION_PREV" ] } INITIAL dynamic_values, { PIPE_K: X$K , TANK1_PRESION_PREV:X$TANK1_PRESION , TANK2_PRESION_PREV:X$TANK2_PRESION } DYNAMIC {name:sys ,CONFIG:V$dynamic_config ,VALUES:V$dynamic_values ,X:300,Y:300 , TOLERANCE: 1e-6, MAX_ITER: 10 } START 1000 include /library_graphics/tank.lib ;============================================================== PROCEDURE agente.init timeout cambiar_deposito,10 advance 0.1 while (1==1) move {name:tTexto, text:"flujo: P$rFlujo Tot: T1: P$rH1 T2: P$rH2 "} SOLVE { name:"sys", DT: 0.1, SAVEVALUE: "resultado"} SAVEVALUE TANK1_PRESION, X$(resultado.TANK1_PRESION) SAVEVALUE TANK2_PRESION, X$(resultado.TANK2_PRESION) SAVEVALUE PIPE_FLUJO, X$(resultado.PIPE_FLUJO) PLOT presiones, X$TANK1_PRESION, X$TANK2_PRESION PLOT flujo, X$PIPE_FLUJO assign rFlujo,round(X$PIPE_FLUJO,3) assign rH1,round(X$TANK1_PRESION,3) assign rH2,round(X$TANK2_PRESION,3) move {name:tTexto, text:"flujo: P$rFlujo Tot: T1: P$rH1 T2: P$rH2 "} CALL tank1.tank.set, P$rH1 CALL tank2.tank.set, P$rH2 IF (ABS(X$PIPE_FLUJO) < 0.001) stop ENDIF advance 0.1,0 endwhile stop ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN call crear_depositos TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_depositos assign config,{title:"TANK 1" ,x:100,y:50 ,width:50 ,height:180 ,value:0 ,max_value:10 ,"color":"#ff0000"} timeout tank1.tank.init,0,V$config assign config,{title:"TANK 2" ,x:400,y:50 ,width:50 ,height:180 ,value:0 ,max_value:10 ,"color":"#ff0000"} timeout tank2.tank.init,0,V$config ENDPROCEDURE ;================================================= PROCEDURE cambiar_deposito assign nuevosParams,{TANK2_PRESION_PREV:10} dynamic_set sys,V$nuevosParams TERMINATE_VE ENDPROCEDURE - + Clásico masa-muelle-amortiguador
Vamos a ver cómo se resuelve este clásico que solo requiere de las ecuaciones y posicionar correctamente la masa con respecto a los componentes.
El ejemplo muestra cómo usar los gráficos 3D.
Example:
/* Masa-muelle-amortiguador */ SYSTEM {TYPE:OPTIONS, REAL_TIME:1} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:VISUAL, MODE:3D, V_WIDTH:70, V_HEIGHT:30, CAMERA:0} UI {TYPE: BUTTON, id:botonA,TEXT: "Pulsar", LABEL: "Pulsar", TRIGGER: Pulsar} UI { TYPE: SLIDER, ID: unSlider, LABEL: "Velocidad", VALUE: 15, MIN: 1, MAX: 50, STEP: 1, TRIGGER: capturarVelocidad } PLOTTER {NAME:V_X, Y_0:V, Y_1:X, X:TIME_AC1} Graphic {NAME:linea1,Type:LINE,X1:0,Y1:0,X2:0,Y2:500} Graphic {NAME:linea2,Type:LINE,X1:0,Y1:0,X2:500,Y2:0} Graphic {NAME:linea3,Type:LINE,X1:0,Y1:0,X2:0,Y2:0,Z2:500} Graphic {NAME:tTexto,Type:TEXT,X:327,Y:486,Text:"tTexto"} GRAPHIC {NAME:muelle, TYPE:OBJECT, src:SPRING, X:0, Y:15, Z:0, DEPTH:10, width:10, height:10, opacity:0.6} GRAPHIC {NAME:masa, TYPE:SPHERE, X:0, Y:3, Z:0, radius:3, color:red} GRAPHIC {NAME:amortiguador, TYPE:BOX, X:0, Y:0, Z:0, WIDTH:2, HEIGHT:20, DEPTH:2, color:blue} GRAPHIC {NAME:amortiguadorB, TYPE:BOX, X:0, Y:10, Z:0, WIDTH:1.6, HEIGHT:20, DEPTH:1.6, color:cyan} ; FIJACIÓN inferior (visual) GRAPHIC {NAME:soporte, TYPE:BOX, X:0, Y:-1, Z:0, WIDTH:20, HEIGHT:2, DEPTH:20, color:yellow} INITIAL mech_config, { EXPRESSIONS: [ "F_spring + F_damper + F_inertial", ; suma de fuerzas = 0 (equilibrio dinámico) "F_spring - K * X", ; resorte "F_damper - C * V", ; amortiguador "F_inertial - M * (V - V_PREV) / DT", ; fuerza de inercia (aceleración) "X - X_PREV - DT * V" ; integración explícita: posición ], STATES: [ "X", ; posición "V", ; velocidad "F_spring", ; fuerza del muelle "F_damper", ; fuerza de amortiguamiento "F_inertial" ; fuerza de inercia ], VARIABLES: [ "K", "C", "M", "X_PREV", "V_PREV" ] } INITIAL mech_values, { K: 20, ; constante del muelle C: 0.005, ; coef. de amortiguamiento M: 1, ; masa X_PREV: 0, ; posición inicial V_PREV: 30 ; velocidad inicial } DYNAMIC { name: sys, CONFIG: V$mech_config, VALUES: V$mech_values, X: 300, Y: 300, TOLERANCE: 1e-6, MAX_ITER: 10 } START 1000 include /library_graphics/speedometer.lib ;============================================================== PROCEDURE agente.init while (1==1) SOLVE { name:"sys", DT: 0.05, SAVEVALUE: "resultado"} SAVEVALUE V, X$(resultado.V) SAVEVALUE X, X$(resultado.X) SAVEVALUE I_cap , X$(resultado.I_cap) assign x_masa,30 + X$X ; === Posición de la masa MOVE {name:masa, Y:P$x_masa} ; === Estirar muelle desde base [0,0,0] hasta la masa MOVE {name:muelle, STRETCH_BETWEEN:"[0,0,0],[0,P$x_masa,0]",rotate_y:P$x_masa*200} ; === Estirar amortiguador desde base también MOVE {name:amortiguador, MOVE_BETWEEN:"[0,0,0],[0,P$x_masa,0]",y:P$x_masa -10} PLOT V_X, X$V, X$X assign rX,round(X$X,3) assign rV,round(X$V,3) CALL tank1.speedometer.set, P$rV CALL tank2.speedometer.set, P$rX IF (ABS(X$V) < 0.001) stop ENDIF advance 0.05,0 endwhile stop ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN CALL crear_indicadores TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_indicadores assign config,{title:"V" ,x:20,y:15 ,width:5 ,height:18 ,value:0 ,min_value:-30 ,max_value:30 ,"color":"#ff0000" ,font:"4px"} call tank1.speedometer.init,V$config assign config,{title:"X" ,x:50,y:15 ,width:5 ,height:18 ,value:0 ,min_value:-10 ,max_value:10 ,"color":"blue" ,font:"4px"} call tank2.speedometer.init,V$config ENDPROCEDURE ;================================================= PROCEDURE Pulsar savevalue velocidad_ui,max(X$velocidad_ui,15) assign nuevosParams,{V_PREV:-X$velocidad_ui} dynamic_set sys,V$nuevosParams TERMINATE_VE ENDPROCEDURE PROCEDURE capturarVelocidad savevalue velocidad_ui,P$PARAM_B TERMINATE_VE ENDPROCEDURE
- + Sistemas No Lineales
- + No Lineales Componentes
- + Por componentes: COMPOSITOR
En simulaciones complejas, a menudo necesitamos modelar sistemas formados por múltiples componentes que interactúan entre sí, como depósitos conectados por tuberías, circuitos eléctricos o sistemas mecánicos acoplados. Para ello, GPSS-Plus utiliza el concepto de composición de sistemas mediante la COMPOSICIÓN.
¿Qué hace la composición?
La composición permite fusionar múltiples DYNAMIC individuales en un solo sistema dinámico. Esta fusión se realiza conectando sus variables según un esquema común de nodos, y resolviendo de forma simultánea todas sus ecuaciones internas.
Estructura de un sistema compuesto
Veamos un ejemplo práctico: tres depósitos conectados por dos tuberías, donde el depósito central tiene dos entradas. El esquema sería:
TANK1 --- PIPE12 --- TANK2 --- PIPE23 --- TANK3
Este sistema se define así:
INITIAL LIQUID_SYSTEM, { COMPONENTS: ["pipe12", "pipe23", "tank1", "tank2", "tank3"], CONNECTIONS: [ { NODE: "n1", CONNECTIONS: ["tank1.A","pipe12.A"] }, { NODE: "n2", CONNECTIONS: ["pipe12.B", "tank2.A"] }, { NODE: "n3", CONNECTIONS: ["pipe23.A", "tank2.B"] }, { NODE: "n4", CONNECTIONS: ["pipe23.B", "tank3.A"] } ] }Cada
NODEindica un punto de conexión física entre uno o más componentes. A cadaNODEse le asignará una variable de esfuerzo compartida (como presión o voltaje), y cada componente aportará sus propias ecuaciones internas y de flujo.Definiendo los componentes
Tubería (PIPE):
INITIAL PIPE_CONFIG, { EFFORTS: { A: { NAME: "PresionA", UNIT: "Pa" }, B: { NAME: "PresionB", UNIT: "Pa" } }, ROLES: { QA: { ROLE: "FLOW", EXPOSED: ["A"] }, QB: { ROLE: "FLOW", EXPOSED: ["B"] }, K: { ROLE: "CONST" } }, EXPRESSIONS: [ "QA + K * (PresionA - PresionB)", ; Flujo desde A a B "QA + QB" ; Conservación de flujo interna ] }Todas y cada una de las variables que aparecen en EXPRESSIONS deben quedar defidas claramente en uno de los dos grupos.
- EFFORT: A: { NAME: "PresionA", UNIT: "Pa" } : Define qué variables de esfuerzo se igualarán con otros componentes conectados en el mismo nodo. Por ejemplo, un tanque tendrá una presión en ese nodo, que se igualará con todas las presiones en ese mismo nodo. Se debe precisar la unidad para tener clara la compatibilidad. En este caso, Pascales (Pa).
- ROLES: QA: { ROLE: "FLOW", EXPOSED: ["A"] }: Se define el
ROLEque va a tener el resto de las variables del sistema.- FLOW: Variables de flujo que se traslada en el interior de cada componente y el puerto en el que se expone.
FLOWpuede exponerse en un puerto (una sola malla) o en dos (creando dos mallas distintas y una ecuación de conservación). - CONST: Constante del sistema de valor numérico.
- STATE: variable que se requiere sea calculada por el sistema.
- FLOW: Variables de flujo que se traslada en el interior de cada componente y el puerto en el que se expone.
Tanque de dos puertos:
INITIAL TANK_2_PORTS_CONFIG, {"EFFORTS": { "A": { "NAME": "PresionA", "UNIT": "Pa" }, "B": { "NAME": "PresionB", "UNIT": "Pa" } }, "ROLES": { "PresionA_PREV": { "ROLE": "const", "UNIT": "Pa" }, "IN1": { "ROLE": "flow", "EXPOSED": ["A"] }, "IN2": { "ROLE": "flow", "EXPOSED": ["B"] } }, "EXPRESSIONS": [ "PresionA - PresionA_PREV - (IN1 + IN2) * DT", ; Conservación de masa/volumen "PresionA - PresionB" ; Misma presión en los dos puertos ] }Composición final del sistema
Después de declarar componentes y conexiones, simplemente se usa en COMANDO:
DYNAMIC {name:sys, compositor:V$LIQUID_SYSTEM, X:712, Y:54}Este
DYNAMICgenera automáticamente todas las ecuaciones necesarias combinando:-
Variables de effort compartidas por nodo.
-
Variables de flow conectadas por puerto.
-
Reglas de conservación (de masa, energía, etc.)
El resultado que se puede ver en la zona de debug sería:
EXPRESSIONS: 1: FLOW_1 + PIPE12_K * (PA_N1 - PA_N2) 2: FLOW_1 + FLOW_2 3: FLOW_3 + PIPE23_K * (PA_N3 - PA_N4) 4: FLOW_3 + FLOW_4 5: PA_N1 - TANK1_PRESION_PREV - FLOW_1 * DT 6: PA_N2 - TANK2_PRESIONA_PREV - (FLOW_2 + FLOW_3) * DT 7: PA_N2 - PA_N3 8: PA_N4 - TANK3_PRESION_PREV - FLOW_4 * DT
Donde vemos que las variables de esfuerzo se han igualado con una para cada nodo y las de flujo se han numerado por malla.
Observaciones finales
-
Cada componente puede reutilizarse fácilmente con distintos valores.
-
Es posible construir bibliotecas completas de componentes (
.lib) y combinarlas para construir modelos complejos sin reescribir expresiones. -
El sistema cuida automáticamente los valores previos (_PREV), nombres unificados y mallas internas.
Example:
/* Por componentes: COMPOSITOR */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:2, SPEED:5} PLOTTER {NAME:presiones, Y_0:tank1, Y_1:tank2, Y_2:tank3, X:TIME_AC1} PLOTTER {NAME:flujo, Y_0:flujo, X:TIME_AC1} Graphic {NAME:tTexto,Type:TEXT,X:376,Y:579,Text:"tTexto"} ; Texto: nivel batería include /library_componets_liquid/liquid.lib INITIAL PIPE12_VALUES, { K: 0.1 } INITIAL PIPE23_VALUES, { K: 0.1 } INITIAL TANK1_VALUES, { Presion_PREV: 10 } INITIAL TANK2_VALUES, { PresionA_PREV: 0 } INITIAL TANK3_VALUES, { Presion_PREV: 3 } DYNAMIC {name:tank1, config:V$TANK_CONFIG, VALUES:V$TANK1_VALUES, X:113, Y:491} DYNAMIC {name:tank2, config:V$TANK_2_PORTS_CONFIG, VALUES:V$TANK2_VALUES, X:396, Y:389} DYNAMIC {name:tank3, config:V$TANK_CONFIG, VALUES:V$TANK3_VALUES, X:696, Y:342} DYNAMIC {name:pipe12, config:V$PIPE_CONFIG, VALUES:V$PIPE12_VALUES, X:189, Y:333} DYNAMIC {name:pipe23, config:V$PIPE_CONFIG, VALUES:V$PIPE23_VALUES, X:603, Y:512} INITIAL LIQUID_SYSTEM, { COMPONENTS: ["pipe12", "pipe23", "tank1", "tank2", "tank3"], CONNECTIONS: [ { NODE: "n1", CONNECTIONS: ["tank1.A","pipe12.A"] }, { NODE: "n2", CONNECTIONS: ["pipe12.B", "tank2.A"] }, { NODE: "n3", CONNECTIONS: ["pipe23.A", "tank2.B"] }, { NODE: "n4", CONNECTIONS: ["pipe23.B", "tank3.A"] } ] } DYNAMIC {name:sys, compositor:V$LIQUID_SYSTEM, X:712, Y:54} START 1000 include /library_graphics/tank.lib ;============================================================== PROCEDURE agente.init timeout cambiar_deposito,2 advance 0.1 while (1==1) SOLVE { name:"sys", DT: 0.01, SAVEVALUE: "resultado"} SAVEVALUE TANK1_PRESION, X$(resultado.tank1_Presion) SAVEVALUE TANK2_PRESION, X$(resultado.tank2_PresionA) SAVEVALUE TANK3_PRESION, X$(resultado.tank3_Presion) SAVEVALUE PIPE12, X$(resultado.pipe12_QA) SAVEVALUE PIPE23, X$(resultado.pipe23_QA) PLOT presiones, X$TANK1_PRESION, X$TANK2_PRESION, X$TANK3_PRESION PLOT flujo, X$PIPE_FLUJO assign rFlujo12,round(X$PIPE12,3) assign rFlujo23,round(X$PIPE23,3) assign rH1,round(X$TANK1_PRESION,3) assign rH2,round(X$TANK2_PRESION,3) assign rH3,round(X$TANK3_PRESION,3) move {name:tTexto, text:"AC1$ flujos: P$rFlujo12 ----- P$rFlujo23 "} CALL tank1.tank.set, P$rH1 CALL tank2.tank.set, P$rH2 CALL tank3.tank.set, P$rH3 IF (ABS(X$PIPE_FLUJO) < 0.001) ;stop ENDIF advance 0.01,0 endwhile stop ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN CALL crear_depositos TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_depositos assign config,{title:"TANK 1" ,x:100,y:50 ,width:50 ,height:180 ,value:0 ,max_value:10 ,"color":"#ff0000"} timeout tank1.tank.init,0,V$config assign config,{title:"TANK 2" ,x:300,y:50 ,width:50 ,height:180 ,value:0 ,max_value:10 ,"color":"#ff0000"} timeout tank2.tank.init,0,V$config assign config,{title:"TANK 3" ,x:500,y:50 ,width:50 ,height:180 ,value:0 ,max_value:10 ,"color":"#ff0000"} timeout tank3.tank.init,0,V$config ENDPROCEDURE ;================================================= PROCEDURE cambiar_deposito assign nuevosParams,{tank3_Presion_PREV:10} dynamic_set sys,V$nuevosParams TERMINATE_VE ENDPROCEDURE - + Librerías de componentes
¿Qué es una librería?
Una librería es un conjunto de componentes predefinidos con sus configuraciones y comportamientos matemáticos ya listos para usarse. En el caso de los componentes de GPSS-Plus se limita a guardar los CONFIG de cada elemento. Por ejemplo:
initial PIPE_CONFIG, { TYPE: "PIPE", EXPRESSIONS: [ "FLUJO + K * (PRESION_A - PRESION_B)" ], STATES: ["FLUJO"], VARIABLES: ["K"], OWNED_VARS: { A: ["FLUJO"], B: ["-FLUJO"] }, REQUIRED_VARS: { A: ["PRESION_A"], B: ["PRESION_B"] } }Solo necesitamos realizar un
INCLUDEdel fichero que la contiene:include /library_componets_liquid/liquid.lib
Y usamos esos config como si los hubiñesemos escrito en el código principal.
initial pipe1_data, { K: 0.1 } dynamic { name: pipe1, config: V$PIPE_CONFIG, values: V$pipe1_data, x: 100, y: 300 } initial tank1_data, { PRESION_PREV: 10 } dynamic { name: tank1, config: V$TANK_CONFIG, values: V$tank1_data, x: 50, y: 400 } initial tank2_data, { PRESION_PREV: 5 } dynamic { name: tank2, config: V$TANK_CONFIG, values: V$tank2_data, x: 200, y: 400 }Ventajas de usar librerías
-
Reutilización y estandarización.
-
Reducción de errores.
-
Modelado más rápido y con mayor calidad.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:3, SPEED:1,pause:0} PLOTTER {NAME:movimiento, Y_0:tank1, Y_1:tank2, X:TIME_AC1} Graphic {NAME:tTexto,Type:TEXT,X:327,Y:486,Text:"tTexto"} include /library_componets_liquid/liquid.lib INITIAL pipe1_DATA, { K: 0.1 } DYNAMIC {name:pipe1,config:V$pipe_CONFIG,VALUES:V$pipe1_DATA,X:373,Y:418} INITIAL tank1_DATA, { PRESION_PREV: 10 } DYNAMIC {name:tank1,config:V$tank_CONFIG,VALUES:V$tank1_DATA,X:123,Y:357} INITIAL tank2_DATA, { PRESION_PREV: 1 } DYNAMIC {name:tank2,config:V$tank_CONFIG,VALUES:V$tank2_DATA,X:624,Y:347} initial COMPOSITOR, { COMPONENTS: [ "pipe1","tank1","tank2"], CONNECTIONS: [ "TANK1.A=PIPE1.A", "TANK2.A=PIPE1.B"] } DYNAMIC {name:sys,compositor:V$COMPOSITOR,X:347,Y:164} START 1 include /library_graphics/tank.lib ;============================================================== PROCEDURE agente.init timeout cambiar_deposito,100 timeout cambiar_deposito2,200 while (1==1) SOLVE { name:"sys", DT: 0.1, SAVEVALUE: "resultado"} SAVEVALUE TANK1_PRESION, X$(resultado.TANK1_PRESION) SAVEVALUE TANK2_PRESION, X$(resultado.TANK2_PRESION) SAVEVALUE PIPE1_FLUJO, X$(resultado.PIPE1_FLUJO) PLOT movimiento, X$TANK1_PRESION, X$TANK2_PRESION assign rFlujo,round(X$PIPE_FLUJO,5) assign rH1,round(X$TANK1_PRESION,5) assign rH2,round(X$TANK2_PRESION,5) move {name:tTexto, text:"flujo:\n P$rFlujo Tot: P$rH1 P$rH2 "} CALL tank1.tank.set, X$TANK1_PRESION CALL tank2.tank.set, X$TANK2_PRESION IF (ABS(X$PIPE1_FLUJO) < 0.001) stop ENDIF advance 1,0 endwhile stop ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN CALL crear_depositos TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_depositos assign config,{title:"TANK 1" ,x:100,y:100 ,width:50 ,height:180 ,value:X$TANK1_PRESION ,max_value:10 ,"color":"#ff0000"} call tank1.tank.init,V$config assign config,{title:"TANK 2" ,x:500,y:100 ,width:50 ,height:180 ,value:X$TANK2_PRESION ,max_value:10 ,"color":"#ff0000"} call tank2.tank.init,V$config ENDPROCEDURE ;================================================= PROCEDURE cambiar_deposito assign nuevosParams,{PIPE1_K:0.3} dynamic_set sys,V$nuevosParams TERMINATE_VE ENDPROCEDURE PROCEDURE cambiar_deposito2 assign nuevosParams,{TANK2_PRESION_PREV:10} dynamic_set sys,V$nuevosParams TERMINATE_VE ENDPROCEDURE -
- + Por componentes: COMPOSITOR
- + No Lineales Restricciones
- + Introducción a las restricciones
Hemos visto varias fórmulas físicas, eléctricas y de fluidos descritas en DYNAMIC evolucionar en el SOLVE.
Resumidamente, introducíamos todas las fórmulas que debía satisfacer un sistema para ser resueltas a la vez. Así podíamos resolver, por ejemplo, el problema de los 3 tanques de líquidos conectados.
Veremos ahora una forma de utilizar ese mismo recurso para dar solución a la física con restricciones que no es otra cosa que lo que vemos en los videojuegos cuando dos objetos colisionan. De la misma manera que podemos simular múltiples objetos moviéndose entre ellos con ciertas restricciones de giro o distancia.
No introducimos un nuevo tipo de simulación, sino una forma distinta de describir otro problema.
Para hacernos una idea de cómo funciona, es como cualquier otra simulación, debemos observar qué sucede en el mundo real y tras ello, describirlo tal cual.
Los pasos suelen ser los siguientes:
1.- El objeto u objetos. Por simplificar, usaremos esferas y cubos perfectos. Pueden tener un peso y radio. Se sitúan en un lugar en el espacio.
2.- Su velocidad puntual. Debemos saber si está estático, con una cierta velocidad libre o está sometido a una fuerza que le confiere una aceleración. Es decir:
Integraremos la posición
x=x+vΔt
Y si hay fuerzas involucradas, también las fuerzas entrarán en juego:
v=v+aΔt
3.- La detección de la restricción. Si hablamos de un objeto que choca con una pared, debemos saberlo antes de efectuar alguna consecuencia. Así que se verificarán si estamos violando alguna restricción.
Si nuestro objeto fuese una esfera, verificaremos si choca o invade el espacio de:
Con pared: comparar coordenadas
Con esfera: distancia entre centros
Con caja: comparar intervalos (AABB)
Con formas más complejas: más geometría
4.- Las restricciones. Si hasta ahora hablamos de posición y velocidad del objeto, una restricción, sea la que sea, debe modificar ambas características. Si el objeto choca contra una pared, el incremento de x irá en la dirección contraria y la velocidad cambiará de signo. Una restricción no “impide”, corrige.
Cosa que no quita para que una restricción sea, por ejemplo, no superar cierta velocidad.
5.- Escalado. Cuando hay muchos objetos se hace inviable meter miles de objetos en el sistema y se realiza por partes.
Se requiere filtrar candidatos por métodos de rejillas o árboles..El ejemplo:
Una sola masa esférica que bota contra las paredes que lo encierran.
Mostramos las fórmulas de las velocidades constantes y sus integrales para obtener las posiciones.
Los estados son los 4 nombrados: Posición (x,y) y sus velocidades (vx,vy)
Y tras esto, las restricciones. Que observemos la primera:
{ "VARIABLE":"VX_PREV", "EXPRESSION":"(X <= (MINX+R) and VX < 0) ? -VX*E : ((X >= (MAXX-R) and VX > 0) ? -VX*E : VX)" }
Significa qué vamos a hacer con una determinable variable si suceden ciertas condiciones. En este caso, qué le va a suceder a la variable "VX_PREV", que es uno de los estados previos a la siguiente iteración del solver.Las variables
*_PREVrepresentan el estado que “hereda” el siguiente paso deSOLVE.
La salida será o dejarla como está en último termino (VX) o modificarla si suceden las condiciones establecidas.
Si vamos hacia la izquierda y hemos pasado el límite izquierdo, VX_PREV será -VX*E.
En caso contrario, comprobaremos la derecha siendo VX_PREV = -VX*E de nuevo.
Y como decíamos, si no hay restricciones que aplicar, VX_PREV será VX.Nótese que "E" es la velocidad que conservo tras cada rebote, así que se usa como multiplicador para reducir la velocidad. Si E fuese 0, sería una parada en seco.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:VISUAL, MODE:3D, V_WIDTH:70, V_HEIGHT:50, CAMERA:0} SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} ;SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Graphic {NAME:linea1,Type:LINE,X1:0,Y1:0,X2:0,Y2:500} Graphic {NAME:linea2,Type:LINE,X1:0,Y1:0,X2:500,Y2:0} Graphic {NAME:linea3,Type:LINE,X1:0,Y1:0,X2:0,Y2:0,Z2:500} GRAPHIC {NAME:masa, TYPE:SPHERE, X:0, Y:3, Z:0, radius:3, color:red} GRAPHIC {NAME:soporteIz, TYPE:BOX, X:-1, Y:30, Z:0, WIDTH:2, HEIGHT:60, DEPTH:20, color:yellow} GRAPHIC {NAME:soporteDe, TYPE:BOX, X:31, Y:30, Z:0, WIDTH:2, HEIGHT:60, DEPTH:20, color:yellow} GRAPHIC {NAME:soporteSu, TYPE:BOX, X:15, Y:61, Z:0, WIDTH:30, HEIGHT:2, DEPTH:20, color:yellow} GRAPHIC {NAME:soporteIn, TYPE:BOX, X:15, Y:-1, Z:0, WIDTH:30, HEIGHT:2, DEPTH:20, color:yellow} INITIAL pelota2D_config, { EXPRESSIONS: [ ; velocidad constante (sin fuerzas) "VX - VX_PREV", "VY - VY_PREV", ; integración explícita "X - X_PREV - DT * VX", "Y - Y_PREV - DT * VY" ], STATES: [ "X","Y","VX","VY" ], VARIABLES: [ "X_PREV","Y_PREV","VX_PREV","VY_PREV", "R","E", "MINX","MAXX","MINY","MAXY" ], ; Las CONDITIONS corrigen el estado después del paso libre (mover → corregir). CONDITIONS: [ ; --- pared izquierda/derecha --- { "VARIABLE":"VX_PREV", "EXPRESSION":"(X <= (MINX+R) and VX < 0) ? -VX*E : ((X >= (MAXX-R) and VX > 0) ? -VX*E : VX)" }, { "VARIABLE":"X_PREV", "EXPRESSION":"(X <= (MINX+R) and VX < 0) ? (MINX+R) : ((X >= (MAXX-R) and VX > 0) ? (MAXX-R) : X)" }, ; --- pared abajo/arriba --- { "VARIABLE":"VY_PREV", "EXPRESSION":"(Y <= (MINY+R) and VY < 0) ? -VY*E : ((Y >= (MAXY-R) and VY > 0) ? -VY*E : VY)" }, { "VARIABLE":"Y_PREV", "EXPRESSION":"(Y <= (MINY+R) and VY < 0) ? (MINY+R) : ((Y >= (MAXY-R) and VY > 0) ? (MAXY-R) : Y)" } ] } INITIAL pelota2D_values, { R: 3, E: 0.8, MINX: 0, MAXX: 30, MINY: 0, MAXY: 60, X_PREV: 20, Y_PREV: 20, VX_PREV: 12, VY_PREV: 7 } DYNAMIC { name: box2d, CONFIG: V$pelota2D_config, VALUES: V$pelota2D_values, X: 200, Y: 200 } START 1000 include /library_graphics/speedometer.lib ;============================================================== PROCEDURE agente.init while (1==1) SOLVE { name:"box2d", DT: 0.1, SAVEVALUE: "resultado"} SAVEVALUE X, X$(resultado.X) SAVEVALUE Y, X$(resultado.Y) ; === Posición de la masa MOVE {name:masa, X:X$X , Y:X$Y} assign vx,round(X$(resultado.VX),3) assign vy,round(X$(resultado.VY),3) CALL indi1.speedometer.set, P$vx CALL indi2.speedometer.set, P$vy ; CONDICIÓN DE PARADA ; IF (ABS(P$vx) < 0.001) ; stop ; ENDIF advance 0.1,0 endwhile ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN CALL crear_indicadores TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_indicadores assign config,{title:"VX" ,x:50,y:15 ,width:5 ,height:18 ,value:0 ,min_value:-15 ,max_value:15 ,"color":"#ff0000" ,font:"3px"} call indi1.speedometer.init,V$config assign config,{title:"VY" ,x:80,y:15 ,width:5 ,height:18 ,value:0 ,min_value:-15 ,max_value:15 ,"color":"blue" ,font:"3px"} call indi2.speedometer.init,V$config ENDPROCEDURE ;================================================= - + Restricciones en Sistemas Dinámicos
¿Qué es una restricción?
En dinámica de sistemas, una restricción es una condición que debe cumplirse en todo momento durante la simulación. A diferencia de una expresión derivada del comportamiento natural de un componente, la restricción no cambia con el tiempo (no depende de la evolución de las variables), sino que impone una relación fija entre ellas.
Esto se conoce también como restricción algebraica y convierte el sistema en un sistema de ecuaciones diferenciales algebraicas (DAE).
Ejemplo: Dos masas unidas por una varilla rígida
Supongamos dos masas conectadas por muelles y amortiguadores, pero además unidas por una barra rígida que mantiene la distancia constante entre ambas.
Esta condición puede expresarse como:
X2 - X1 = L
Donde:
X1yX2son las posiciones de las masasLes la longitud de la barra
Esta igualdad debe mantenerse durante toda la simulación. Para ello, se introduce una fuerza de restricción, calculada mediante un multiplicador de Lagrange (
Lambda) que se añade a las ecuaciones del sistema.Configuración del sistema
INITIAL mech_config, { EXPRESSIONS: [ ; Leyes de Newton para cada masa "F1 - M1 * (V1 - V1_prev) / DT", "F2 - M2 * (V2 - V2_prev) / DT", ; Fuerzas internas: muelle y amortiguador "FD1 - C1 * V1", "F_spring1 - K1 * X1", "FD2 - C2 * V2", "F_spring2 - K2 * (X2 - X1)", ; Fuerza de restricción impuesta por Lagrange "F_restriction + Lambda", ; Suma de fuerzas sobre cada masa "F1 + F_spring1 + FD1 - F_spring2 - F_restriction", "F2 + F_spring2 + FD2 + F_restriction", ; Integración de posición "X1 - X1_prev - DT * V1", "X2 - X2_prev - DT * V2", ; ***** Restricción geométrica ***** "X2 - X1 - L" ], STATES: [ "X1", "X2", "V1", "V2", "F1", "F2", "FD1", "FD2", "F_spring1", "F_spring2", "F_restriction", "Lambda" ; variable de Lagrange ], VARIABLES: [ "M1", "M2", "K1", "K2", "C1", "C2", "L", "X1_prev", "X2_prev", "V1_prev", "V2_prev" ] }Cómo actúa la restricción
La ecuación
"X2 - X1 - L"es una ecuación de restricción.El sistema debe resolver todas las ecuaciones simultáneamente (incluyendo la restricción), y para ello introduce
Lambda, una variable interna que representa la fuerza necesaria para mantener esa condición en todo instante.Esta fuerza luego se suma (o resta) a las ecuaciones de fuerza total en cada masa:
"F1 + ... - F_restriction" "F2 + ... + F_restriction"
Esto asegura que si el sistema tiende a violar la restricción (por una aceleración, por ejemplo), la fuerza de restricción reacciona inmediatamente para mantenerla.
¿Qué resuelve GPSS-Plus?
Todo esto se resuelve en el
DYNAMIC, con el uso interno del método de Newton-Raphson y matrices jacobianas, que permiten resolver tanto variables dinámicas (X1,V1, etc.) como variables algebraicas (Lambda) en un mismo sistema.Conclusión
Las restricciones permiten simular comportamientos realistas y complejos, como:
-
Barras rígidas
-
Pistones hidráulicos con volumen constante
-
Relaciones geométricas en mecanismos
-
Conservación de energía o momento
El uso de
Lambdacomo multiplicador de Lagrange es una herramienta clave para introducirlas de forma explícita y controlada en tus sistemas dinámicos.
Example:
/* Restricciones en Sistemas Dinamicos */ SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {type:OPTIONS, TIME_DECIMALS:1, SPEED:5} PLOTTER {NAME:posiciones, Y_0:X1, Y_1:X2, X:TIME_AC1} Graphic {NAME:tTexto,Type:TEXT,X:327,Y:486,Text:"tTexto"} INITIAL mech_config, { EXPRESSIONS: [ "F1 - M1 * (V1 - V1_PREV) / DT", "FD1 - C1 * V1", "F_spring1 - K1 * X1", "F_spring2 - K2 * (X2 - X1)", "FD2 - C2 * V2", "F2 - M2 * (V2 - V2_PREV) / DT", "F_restriction + Lambda", ; fuerza de restricción (con signo) "F1 + F_spring1 + FD1 - F_spring2 - F_restriction", "F2 + F_spring2 + FD2 + F_restriction", "X1 - X1_PREV - DT * V1", "X2 - X2_PREV - DT * V2", "X2 - X1 - L" ; restricción geométrica ], STATES: [ "X1", "X2", "V1", "V2", "F1", "F2", "FD1", "FD2", "F_spring1", "F_spring2", "F_restriction", "Lambda" ], VARIABLES: [ "M1", "M2", "K1", "K2", "C1", "C2", "L", "X1_PREV", "X2_PREV", "V1_PREV", "V2_PREV" ] } INITIAL mech_values, { M1: 1.5, M2: 1.5, K1: 5, K2: 8, C1: 0.1, C2: 0.1, X1_PREV: 1.5, V1_PREV: 2, X2_PREV: 3.5, V2_PREV: -1, L: 2 ; restricción de distancia entre masas } DYNAMIC { name: sys, CONFIG: V$mech_config, VALUES: V$mech_values, X: 300, Y: 300, TOLERANCE: 1e-6, MAX_ITER: 10 } START 1000 include /library_graphics/speedometer.lib ;============================================================== PROCEDURE agente.init while (1==1) SOLVE { name:"sys", DT: 0.1, SAVEVALUE: "resultado"} SAVEVALUE X1, X$(resultado.X1) SAVEVALUE X2, X$(resultado.X2) SAVEVALUE V1, X$(resultado.V1) PLOT posiciones, X$X1, X$X2 assign rX1,round(X$X1,5) assign rX2,round(X$X2,5) CALL tank1.speedometer.set, P$rX1 CALL tank2.speedometer.set, P$rX2 IF (ABS(X$V1) < 0.00001) stop ENDIF advance 0.1,0 endwhile stop ENDPROCEDURE ;==================================================================== PROCEDURE PRE_RUN CALL crear_indicadores TIMEOUT agente.init,0 TERMINATE_VE ENDPROCEDURE ;================================================= PROCEDURE crear_indicadores assign config,{title:"X1" ,x:100,y:50 ,width:50 ,height:180 ,value:0 ,min_value:-5 ,max_value:5 ,"color":"#ff0000"} call tank1.speedometer.init,V$config assign config,{title:"X2" ,x:400,y:50 ,width:50 ,height:180 ,value:0 ,min_value:-5 ,max_value:5 ,"color":"purple"} call tank2.speedometer.init,V$config ENDPROCEDURE ;=================================================
- + Introducción a las restricciones
- + Sistemas No Lineales
- + Season 12: Acoplamiento físico y real
- + *Acoplamiento con el mundo real
Hasta ahora, trabajábamos construyendo modelos que operaban dentro de un universo cerrado y controlado dentro del motor de GPSS-Plus. El motor de simulación decidía cuándo avanzaba el tiempo, qué ocurría en cada momento y cómo se comportaban los elementos del sistema. Era un entorno lógico, determinista y autónomo.
Vamos a romper con todo eso con la entrada en escena del mundo real. Ya nada será lo mismo: el enfoque del motor cambia, las entidades vivirán según otros patrones y los flujos dejarán de estar solo bajo nuestro control.
Las entidades no deberían avanzar porque lo decide un número aleatorio, sino porque un sensor físico ha detectado su presencia.
El tiempo
Una de las primeras consecuencias de esta apertura al exterior es que el tiempo deja de pertenecernos.
Ya no podemos acelerarlo ni pausarlo arbitrariamente. Si el motor quiere leer de un sensor, deberá esperar lo que ese sensor tarde en responder. Si la lectura de un fichero se retrasa, también lo hará la simulación. Por eso, al trabajar con el mundo real, la ejecución debe ser en tiempo real.
Lo que antes era solo un “momento”, ahora es estrictamente un segundo del reloj del sistema. Se declara así:
SYSTEM {TYPE:OPTIONS, REAL_TIME:1,TIME_DECIMALS:1}Un
ADVANCE 10significa exactamente espera 10 segundos reales.A partir de ahí, no hay marcha atrás: todo ocurre al ritmo del mundo físico, y la simulación se convierte en una parte subordinada de la realidad.
El motor deja de ser un simulador puro y pasa a comportarse como un orquestador de procesos realesLa nueva arquitectura del sistema
Podemos identificar ahora tres grandes componentes del sistema:
- GPSS-Plus y el recurso BRIDGER, que usarán las entidades para emitir y recibir órdenes.
- El mundo exterior, que puede incluir sensores, bases de datos, sistemas de archivos o dispositivos físicos o virtuales. Incluso otros motores de simulación.
- El middleware.js, que es un nuevo software bidireccional que sabrá comunicarse con el
BRIDGERy cualquier elemento del mundo exterior.
EL BRIDGER:
Desde el punto de vista de una entidad, además del COMANDO
BRIDGER, solo tiene 6 BLOQUES:- BRIDGE_READ
- BRIDGE_WRITE
- BRIDGE_SUBSCRIBE
- BRIDGE_UNSUBSCRIBE
- BRIDGE_BROWSE
- BRIDGE_CALL
Estos BLOQUES son los que se comunican con el middleware.js
EL MIDDLEWARE.js
Disponible en el capítulo de descargas.
Es un conjunto de archivos en javascript para ejecutar en entorno node.js que recibe las instrucciónes del
BRIDGERy se las retransmite al dispositivo exterior y viceversa.En resumen, middleware.js funciona como una capa de intercambio entre protocolos, transformando los cinco bloques definidos en GPSS-Plus en mensajes compatibles con MQTT (el más utilizado, basado en topics) y OPC-UA (el más completo, con estructuras jerárquicas y tipos de dato definidos).
Para las pruebas iniciales existe un servicio público operativo en:
wss://bridger.gpss-plus.com:3000
EL mundo exterior
Son todos los sensores, actuadores, dispositivos y recursos externos.
Para pruebas, dispones de un cliente virtual OPC-UA que representa un conjunto de sensores y servicios simulados.
Su dirección es: opc.tcp://opcua.gpss-plus.com:4840
Contiene una báscula, un sensor de puerta, sensores de distancia, control PID, lectura y escritura de archivos, e incluso ejecución de programas en segundo plano.
Naturalmente, puedes modificar y ampliar el código para añadir tus propios servicios.
La topología:
Estos tres elementos se distribuyen de la siguiente manera:
gpss-plus 192.168.x.x 192.168.n.m BRIDGER <-> middleware.js <-> Sensor temperatura 192.168.a.b | Sistema de Ficheros (El navegador) | Base de datos MySQL | | 192.168.n.m | 192.168.y.y Generador de números aleatorios <-> middleware.js <-> Red neuronal | Detector de movimiento OPC-UA | | | 192.168.z.z 192.168.n.m <-> middleware.js <-> Semáforo entre sistemasEn resumen, el navegador que ejecuta GPSS-Plus debe poder acceder a la IP donde esté instalado middleware.js, y este, a su vez, al dispositivo o servicio externo.
La configuración más estable es tener middleware.js en la misma red que los sensores.En los siguientes capítulos veremos cómo manejar el BRIDGER paso a paso y construiremos nuestros propios dispositivos físicos.
- + Los recursos externos
En GPSS-Plus llamamos recurso externo a cualquier elemento del sistema que no forma parte directamente del motor de simulación, pero con el que las entidades pueden interactuar.
Estos recursos pueden actuar como fuentes de datos o como actuadores reales dentro del entorno físico o digital.¿Qué cuenta como recurso externo?
Ejemplos típicos incluyen:
-
Un archivo en el sistema de ficheros (FS).
-
Una tabla MySQL o cualquier base de datos accesible por red.
-
Un sensor físico, como un detector de temperatura o movimiento, conectado mediante OPC-UA o MQTT.
-
Una API REST que devuelve estados o acepta comandos.
-
Un dispositivo industrial o electrónico, como una báscula, un motor o una célula de carga.
En resumen, todo aquello que vive fuera del motor pero puede influir en él se considera un recurso externo.
Un solo mecanismo para todos
GPSS-Plus no diferencia entre un sensor y una base de datos.
Ambos son tratados de forma uniforme mediante el recursoBRIDGER, que actúa como interfaz universal de acceso.Esto simplifica enormemente el modelo mental:
puedes sustituir un sensor real por una tabla MySQL, o por un archivo local, sin reescribir tu modelo, simplemente cambiando la configuración delBRIDGER.El sensor de ejemplo: OPC-UA Virtual Device
OPC-UA (Open Platform Communications – Unified Architecture) es un estándar industrial para la comunicación estructurada entre dispositivos y sistemas.
Permite intercambiar nodos, atributos y eventos de manera segura, jerárquica y extensible.En GPSS-Plus puedes conectarte tanto a un servidor OPC-UA real, como al dispositivo virtual incluido para pruebas y desarrollo sin hardware físico.
Este dispositivo virtual expone nodos simulados como:
-
Sensor_Temp_1 -
Motor_X.Status -
Contador_Piezas -
Puerta_Acceso_A.IsOpen
Podrás leer, escribir o suscribirte a sus cambios usando siempre el mismo mecanismo del
BRIDGER.En los siguientes capítulos veremos cómo:
-
Detectar eventos, como la apertura de una puerta simulada.
-
Acceder a sistemas de archivos o servicios en línea de solo lectura.
-
Ejecutar aplicaciones o scripts remotos.
Tanto el dispositivo OPC-UA virtual como el middleware.js pueden descargarse y modificarse libremente para adaptarlos a tus propias necesidades o hardware real.
-
- + BRIDGE_SUBSCRIPTION obtener datos en tiempo real
Veamos un ejemplo concreto para entender cómo fluye la información entre GPSS-Plus, middleware.js y el servidor OPC-UA.
Vamos a modificar el comportamiento de un bloque GENERATE para que las entidades se creen cuando un sensor físico (simulado) detecte la apertura de una puerta —en lugar de hacerlo por parámetros de tiempo o probabilidad.
Creando el puente de comunicación
Lo primero es definir el BRIDGER, que será el enlace con el mundo exterior:
Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:333,Y:444 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"opc.tcp://opcua.gpss-plus.com:4840" ,OPTIONS:V$options ,ON_ERROR:bridge1_on_error }Los parámetros principales son:
- NAME: identificador interno del BRIDGER (por ejemplo,
bridge1). - SERVER: dirección WebSocket segura donde escucha el
middleware.js. - CLIENT: dirección del servidor OPC-UA (normalmente en la misma red que el middleware).
- OPTIONS: parámetros adicionales (como usuario y contraseña) requeridos para la conexión.
- ON_ERROR: trigger que se ejecutará si ocurre un error en la comunicación.
Más adelante veremos que tanto el
middleware.jscomo el cliente OPC-UA virtual pueden modificarse para adaptarse a otras topologías o protocolos.Suscribiéndose a un sensor
Una vez definido el puente, debemos iniciar la conexión dentro del
PRE_RUNdel modelo, y suscribirnos a la variable que representa el estado de la puerta:BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Sensor_Door_IsOpen" , TRIGGER: on_open }Esta instrucción mantiene un canal abierto con el sensor para recibir notificaciones automáticas cada vez que cambie su valor.
Donde de nuevo, los parámetros son mínimos:
- NAME: el nombre del BRIDGER que gestionará la comunicación.
- VARIABLE: el nombre exacto de la variable publicada por el sensor. (La variable expuesta que más adelante veremos cómo se obtiene)
- TRIGGER: el procedimiento que procesará cada actualización recibida.
Las suscripciones permiten recibir datos en tiempo real sin necesidad de ejecutar lecturas periódicas.
El procedimiento asociado
Cada vez que se recibe un nuevo valor, se ejecuta el trigger indicado.
El parámetroP$(PARAM_A.VALUE)contendrá el valor actual del sensor (0 o 1 en este caso). PARAM_B contiene el número de la entidad invocante y PARAM_C el tiempo.procedure on_open move {name:Text1,TEXT:"DOOR P$(PARAM_A.VALUE)"} if (P$(PARAM_A.VALUE.EXIST) && P$(PARAM_A.VALUE)==1) NEW GEN1 endif TERMINATE_VE endprocedureEn este ejemplo, cada vez que el sensor detecta que la puerta se abre (valor = 1), el sistema crea una nueva entidad GEN1, simulando la entrada de una persona.
También cabe la opción de anular la subscripción:
BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Sensor_Door_IsOpen" }
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Facility {NAME:facility1,X:446,Y:514} Graphic {Type:TEXT,Name:Text1,X:376,Y:358} Graphic {Type:TEXT,Name:TextError,X:376,Y:330,Text:"On error...."} Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:375,Y:398 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"opc.tcp://opcua.gpss-plus.com:4840" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:264,Y:511} POSITION {NAME:POS2,X:658,Y:509} START 100 ;***************************************************** PROCEDURE PRE_RUN BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Sensor_Door_IsOpen" , TRIGGER: on_open } TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 0,0,0,0 {NAME:GEN1,X:141,Y:351} ADVANCE 5,0 {TO:POS1} ADVANCE 5,0 {TO:facility1} SEIZE facility1 advance 10,10 RELEASE facility1 ADVANCE 10,0 {TO:POS2} ENDGENERATE 1 ;---------------------------------------------------------------------------- procedure on_open move {name:Text1,TEXT:"DOOR P$(PARAM_A.VALUE)"} if (P$(PARAM_A.VALUE.EXIST) && P$(PARAM_A.VALUE)==1) NEW GEN1 endif TERMINATE_VE endprocedure ;---------------------------------------------------------------------------- procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure - NAME: identificador interno del BRIDGER (por ejemplo,
- + BRIDGE_BROWSE Vista del dispositivo
Hemos visto que en el OPC-UA virtual podíamos leer repetidamente el valores de la variable "Sensor_Door_IsOpen".
Sin embargo, no siempre sabremos qué variables o métodos existen dentro de un dispositivo. Por ejemplo, un servicio de archivos podría listar directorios, o una base de datos podría exponer tablas cuyos nombres cambian.
Para eso existe el bloque
BRIDGE_BROWSE, que permite consultar la estructura interna del dispositivo o servicio conectado.¿Por qué usar BRIDGE_BROWSE?
El comando
BRIDGE_BROWSEsirve para descubrir:- Qué variables están disponibles.
- Qué tipo de dato tiene cada una (Boolean, Double, String, etc.).
- Si son de lectura, escritura o ambas.
- Qué métodos u operaciones están expuestos.
En otras palabras, es el mapa de capacidades del dispositivo.
Por lo que de los 5 BLOQUES del
BRIDGERvamos a ver qué se obtiene deBRIDGE_BROWSE.- BRIDGE_READ
- BRIDGE_WRITE
- BRIDGE_SUBSCRIBE
- BRIDGE_BROWSE
- BRIDGE_CALL
BRIDGE_BROWSEse ejecuta automáticamente durante la primera conexión, pero también puede invocarse manualmente si se desea explorar un nuevo dispositivo o verificar qué ha cambiado.Ejemplo de salida (debug o canvas)
Al ejecutar
BRIDGE_BROWSE, el middleware devuelve un listado jerárquico de las variables accesibles:Sensor_Motion_Detected: ns=1;i=1000 [Boolean] Sensor_Door_IsOpen: ns=1;i=1001 [Boolean] PIDControl_CurrentTemperature: ns=1;i=1002 [Double] PIDControl_Setpoint: ns=1;i=1003 [Double] (writable) PIDControl_PIDOutput: ns=1;i=1004 [Double] Device_Motor_Enabled: ns=1;i=1005 [Boolean] (writable) System_Battery_BatteryLevel: ns=1;i=1006 [Double] Device_Scale_Weight: ns=1;i=1007 [Double] Device_Scale_Trigger: ns=1;i=1008 [Boolean] (writable) Device_Piston_IsExtended: ns=1;i=1009 [Boolean] Device_Piston_Trigger: ns=1;i=1010 [Boolean] (writable) ... ...
Cada línea muestra:
- El nombre de la variable.
- Su identificador interno (
ns=1;i=1000, típico en OPC-UA). - El tipo de dato.
- Si es o no escribible (
(writable)). - Si es un método ejecutable.
Usar BRIDGE_BROWSE manualmente
Antes de interactuar con un nuevo dispositivo, ejecuta
BRIDGE_BROWSEuna vez para conocer su estructura.
Después podrás usarBRIDGE_READ,BRIDGE_WRITEoBRIDGE_SUBSCRIBEde forma precisa sobre las variables que hayas identificado.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Graphic {Type:TEXT,Name:Text1,X:653,Y:294} Graphic {Type:TEXT,Name:TextError,X:440,Y:329,Text:"On error...."} Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:443,Y:405 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"opc.tcp://opcua.gpss-plus.com:4840" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:209,Y:347} START 1 ;***************************************************** PROCEDURE PRE_RUN BRIDGE_BROWSE { NAME: bridge1 , TRIGGER: on_browse } TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 10,0,0,1 {NAME:GEN1,X:141,Y:351} ADVANCE 5,0 {TO:POS1} ENDGENERATE 1 ;---------------------------------------------------------------------------- procedure on_browse move {name:Text1,TEXT:"BROWSE P$(PARAM_A)"} TERMINATE_VE endprocedure ;---------------------------------------------------------------------------- procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure - + BRIDGE_WRITE BRIDGE_READ el actuador
Hasta ahora hemos recibido datos del mundo exterior.
Ahora aprenderemos a enviar instrucciones y leer valores específicos desde GPSS-Plus hacia un dispositivo OPC-UA, MQTT o cualquier otro conectado por elmiddleware.jsEscribir en un dispositivo
Dar una orden a un actuador es tan simple como asignar un valor y enviarlo:
ASSIGN values, { Device_Motor_Enabled: 1 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write}Esto escribe en la variable
Device_Motor_Enableddel dispositivo, encendiendo el motor (1 = ON, 0 = OFF).
La estructura del comando es siempre la misma:- VALUES: un conjunto clave-valor con las variables a modificar.
- TRIGGER: el procedimiento que se ejecutará cuando el middleware confirme la entrega.
Leer el estado de una variable
La lectura se realiza de forma análoga:
ASSIGN values, ["Device_Motor_Enabled"] BRIDGE_READ {name:bridge1, trigger:on_read, VALUES:V$values}En este caso, la lista
["Device_Motor_Enabled"]indica qué variables queremos consultar.
El valor llegará de forma asíncrona, y se recibirá dentro del trigger correspondiente (on_read).Ejecución asíncrona o síncrona
Por defecto, las operaciones READ y WRITE son asíncronas:
el motor GPSS-Plus continúa su ejecución sin detenerse a esperar la respuesta del dispositivo.Esto es lo habitual en sistemas físicos, donde la comunicación puede tardar varios cientos de milisegundos.
Si el recurso es inmediato (por ejemplo, un fichero local o una base de datos interna), puedes forzar una operación síncrona con:
BRIDGE_READ { name:bridge1, VALUES:V$values, SYNC:1, trigger:on_read }De este modo, la entidad y el motor se bloquea hasta recibir la respuesta.
Debe usarse solo en contextos controlados, ya que detener el tiempo del simulador afecta a todo el sistema.
Example:
SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Graphic {Type:TEXT,Name:Text1,X:653,Y:294} Graphic {Type:TEXT,Name:Text2,X:653,Y:194} Graphic {Type:TEXT,Name:TextError,X:440,Y:329,Text:"On error...."} Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:443,Y:405 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"opc.tcp://opcua.gpss-plus.com:4840" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:209,Y:347} POSITION {NAME:POS2,X:409,Y:347} START 100 ;***************************************************** GENERATE 3,0,0,10 {NAME:GEN1,X:141,Y:351} ASSIGN values, ["Device_Motor_Enabled"] BRIDGE_READ {name:bridge1, trigger:on_read, VALUES:V$values} ADVANCE 5,0 {TO:POS1} if (D$N %2 == 0 ) ASSIGN values, { Device_Motor_Enabled: 0 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} else ASSIGN values, { Device_Motor_Enabled: 1 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} endif ADVANCE 5,0 {TO:POS2} ENDGENERATE 1 ;---------------------------------------------------------------------------- procedure on_write move {name:Text1,TEXT:"AC1$ WRITE P$(PARAM_A)"} TERMINATE_VE endprocedure ;---------------------------------------------------------------------------- procedure on_read move {name:Text2,TEXT:"AC1$ READ P$(PARAM_A) \n:: Valor: P$(PARAM_A.Device_Motor_Enabled)"} TERMINATE_VE endprocedure ;---------------------------------------------------------------------------- procedure bridge1_on_error move {name:TextError,TEXT:"AC1$ P$PARAM_A"} TERMINATE_VE endprocedure - + Ejemplo completo: control de pesaje y clasificación
En este ejemplo vamos a ver todos los elementos del sistema en funcionamiento.
El modelo representa una línea de producción automatizada en la que los paquetes llegan uno a uno, son pesados en una báscula, y según su peso son desviados hacia un camino u otro mediante un pistón neumático.
Descripción del proceso
-
Detección de entrada
Un sensor de puerta detecta la llegada de un nuevo paquete (simboliza un producto que entra en la zona).
Cada detección genera una nueva entidad en GPSS-Plus. -
Control de flujo unitario
Un restroom actúa como liberador unitario, permitiendo que los paquetes pasen de uno en uno hacia la báscula.
El siguiente paquete solo avanza cuando el anterior ha terminado el pesaje. -
Pesaje
Al llegar a la báscula, la entidad activa el sensor (Device_Scale_Trigger = 1).
Cuando el peso se estabiliza, el sistema asigna el valor leído a la entidad. -
Clasificación
Si el peso supera un umbral (pesoLimite), se activa el pistón (Device_Piston_Trigger = 1) que desvía el paquete hacia la zona de pesados.
Si no, continúa recto hacia la zona de ligeros. -
Sincronización con actuadores físicos
El pistón se retrae automáticamente.
GPSS-Plus se suscribe al estado del pistón (Device_Piston_IsExtended) para saber cuándo está listo para el siguiente ciclo.
Arquitectura del sistema:
[Sensor Puerta] -> genera entidad ↓ [Liberador Unitario] ↓ [Báscula] ←→ OPC-UA Device_Scale_Weight ↓ [Separador / Pistón] ↓ [Salida Ligeros] / [Salida Pesados]
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Restroom {NAME:LiberadorUnitario,X:155,Y:332} Queuer {NAME:zonaBascula,X:163,Y:32} Graphic {NAME:lineZonaBascula,Type:LINE,color:#FF0000, X1:82,Y1:64,X2:260,Y2:65} Restroom {NAME:RestroomBascula,X:226,Y:110} initial pesoLimite,8 Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:733,Y:556 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"opc.tcp://opcua.gpss-plus.com:4840" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:97,Y:437} POSITION {NAME:POS2,X:95,Y:183} POSITION {NAME:PosBascula,X:225,Y:199} POSITION {NAME:PosSeparador,X:387,Y:201} POSITION {NAME:PosPesados,X:513,Y:302} POSITION {NAME:PosPesados2,X:594,Y:302} POSITION {NAME:PosLigeros,X:511,Y:197} POSITION {NAME:PosLigeros2,X:592,Y:197} Graphic {NAME:Text1,Type:TEXT,X:167,Y:484,Text:"On OPEN"} Graphic {NAME:TextError,Type:TEXT,X:424,Y:582,Text:"Error"} Graphic {NAME:lineBascula,Type:LINE,color:#FF0000, X1:191,Y1:176,X2:263,Y2:176} Graphic {NAME:txtBascula,Type:TEXT,X:226,Y:156,Text:"bascula"} Graphic {NAME:lineSeparador,Type:LINE,color:#FF0000, X1:363,Y1:201,X2:432,Y2:201} Graphic {NAME:txtSeparador,Type:TEXT,X:394,Y:143,Text:"separador"} START 10 ;***************************************************** PROCEDURE PRE_RUN BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Sensor_Door_IsOpen" , TRIGGER: on_open } savevalue pesoActual,0 savevalue pesoAnterior,X$pesoActual BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Device_Scale_Weight" , TRIGGER: on_subscription_bascula } BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "Device_Piston_IsExtended" , TRIGGER: on_subscription_piston } ASSIGN values, { Device_Scale_Trigger: 0 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 0,0,0,0 {NAME:GEN1,X:91,Y:547} ADVANCE 5,0 {TO:POS1,flow:1} ADVANCE 5,0 {TO:LiberadorUnitario,flow:1} if (R$(zonaBascula,in)>0) rest LiberadorUnitario endif queue zonaBascula ADVANCE 5,0 {TO:POS2,flow:1} ADVANCE 5,0 {TO:PosBascula,flow:1} ASSIGN values, { Device_Scale_Trigger: 1 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} rest RestroomBascula depart zonaBascula call liberarRestroomBascula ADVANCE 2 mod {subtitle:"P$peso Kg"} if (P$peso > X$pesoLimite) mod {color:"red"} else mod {color:"green"} endif ASSIGN values, { Device_Scale_Trigger: 0 } BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} timeout moverPiston,4.3,P$peso ADVANCE 5,0 {TO:PosSeparador,flow:1} if (P$peso > X$pesoLimite) ADVANCE 3,0 {TO:PosPesados} ADVANCE 3,0 {TO:PosPesados2,flow:1} else ADVANCE 3,0 {TO:PosLigeros} ADVANCE 3,0 {TO:PosLigeros2,flow:1} endif ENDGENERATE 1 ;---------------------------------------------------------------------------- procedure on_open move {name:Text1,TEXT:"DOOR P$(PARAM_A.VALUE)"} if (P$(PARAM_A.VALUE.EXIST)) if (P$(PARAM_A.VALUE)==1) NEW GEN1 endif endif TERMINATE_VE endprocedure procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure ;------------------------- procedure on_subscription_bascula savevalue pesoActual,P$(PARAM_A.VALUE) move {name:txtBascula,TEXT:"X$pesoActual Kg"} if (ABS(X$pesoAnterior-X$pesoActual)<=0.1 && X$pesoActual>1) FOREACH entidad, IN_RESOURCE, RestroomBascula assign peso,round(X$pesoActual,1), P$entidad ENDFOREACH wake RestroomBascula endif savevalue pesoAnterior,X$pesoActual TERMINATE_VE endprocedure ;------------------------- procedure on_write TERMINATE_VE endprocedure procedure on_subscription_piston if (P$(PARAM_A.VALUE)==1) move {name:lineSeparador,Y2:220} else move {name:lineSeparador,Y2:200} endif move {name:txtSeparador,text:"Piston P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure liberarRestroomBascula assign hecho,0 FOREACH entidad, IN_RESOURCE, zonaBascula if (P$hecho==0) wake RestroomBascula,P$entidad endif assign hecho,1 ENDFOREACH endprocedure procedure moverPiston if (P$PARAM_A>X$pesoLimite) ASSIGN values, { Device_Piston_Trigger: 1 } BRIDGE_WRITE { name:bridge1, VALUES:V$values, TRIGGER:on_write } assign tmp,"pesados" else assign tmp,"ligeros" endif ; move {name:txtSeparador,text:"Piston P$(PARAM_A) Kg -- P$tmp"} TERMINATE_VE endprocedure -
- + Descargas e instalación componentes BRIDGER
Para ejecutar los ejemplos más avanzados y conectar GPSS-Plus con el mundo real, será necesario instalar tu propio middleware.js y, opcionalmente, el dispositivo virtual OPC-UA y los firmwares de microcontroladores.
middleware.js : Versión 1.03
El middleware actúa como capa intermedia entre GPSS-Plus y los sensores o actuadores físicos.
Debe ejecutarse en un entorno Node.js con comunicación segura (HTTPS / WSS).Requisitos previos
- Node.js versión 18 o superior.
- Certificados SSL válidos (necesarios para el canal seguro).
- Conectividad de red con GPSS-Plus y los dispositivos OPC-UA o MQTT.
Instalación de certificados
Dependiendo de si lo ejecutarás en una red privada o en un dominio público, hay dos opciones:
a) Entorno local – usando mkcert
Ideal para pruebas en red interna.
Ejemplo para mcert sobre Debian:
# Crea una entrada de DNS en tui dominio a tu IP local. Ejemplo: ip11.midominio.com -> 192.168.1.11 # Instalar el paquete libnss3-tools (que contiene certutil) sudo apt install libnss3-tools # Descarga mkcert wget https://github.com/FiloSottile/mkcert/releases/latest/download/mkcert-v1.4.4-linux-arm mv mkcert-v1.4.4-linux-arm /usr/local/bin/mkcert chmod +x /usr/local/bin/mkcert mkcert -version (v1.4.4) # instalar el certificado raiz mkcert -install # crea el certificado para tu subdominio particular de la entrada DNS creada: mkcert ip11.tudomino.com 192.168.1.11 # Mueve los certificados a una ubicación estándar: mkdir -p /etc/ssl/localcerts mv ip11.tudominio.com+1.pem /etc/ssl/localcerts/ mv ip11.tudominio.com+1-key.pem /etc/ssl/localcerts/ chown root:root /etc/ssl/localcerts/* chmod 600 /etc/ssl/localcerts/*-key.pem #Para evitar errores de confianza, instala el archivo rootCA.pem (ubicado en ~/.local/share/mkcert) #como “Entidad de certificación raíz de confianza” en tu sistema. mkcert -CAROOT /root/.local/share/mkcert (ruta probable de localicación del rectificado rootCA.pem)b) Servidor público – usando Let’s Encrypt
En servidores accesibles desde Internet, utiliza certificados reales de, por ejemplo let´s Encrypt
Edita el archivo middleware.js
Descarga y edita el archivo middleware.js para incorporar las rutas de los certificados.
const host = process.env.SERVER_HOST || 'ipXXX.your.domain'; ... const certOptions = { cert: fs.readFileSync("/etc/letsencrypt/live/PATH_CHAIN/fullchain.pem"), key: fs.readFileSync("/etc/letsencrypt/live/PATH_PRIVKEY/privkey.pem") }; OR const certOptions = { cert: fs.readFileSync("/etc/ssl/localcerts/ipXXX.your.domain.pem"), key: fs.readFileSync("/etc/ssl/localcerts/ipXXX.your.domain-key.pem") };Ejecuta previniendo la instalación de las librerías necesarias:
npm install express ws cors aedes node-opcua mysql2 serialport mqtt npm install node middleware.js
La salida esperada es:
# node middleware.js [INFO] [MQTT_EMBEDDED] Embedded broker listening on port 1883 [INFO] Server listening on https://your.domain:3000
Una vez en ejecución, puedes configurarlo como un servicio (
systemd,pm2, etc.).
OPC-UA virtual : Versión 1.0
Este servidor OPC-UA virtual simula un conjunto de sensores y actuadores, ideal para desarrollo y pruebas sin hardware físico o el acceso a los recursos locales.
Ejecuta previniendo la instalación de las librerías necesarias:
npm install npm modbus-serial node index.js
La salida esperada es:
# node index.js [-] RO: 1:Sensor_Motion_Detected [-] RO: 1:Sensor_Door_IsOpen [-] RO: 1:PIDControl_CurrentTemperature [+] RW: 1:PIDControl_Setpoint [-] RO: 1:PIDControl_PIDOutput [+] RW: 1:Device_Motor_Enabled [-] RO: 1:System_Battery_BatteryLevel [-] RO: 1:Device_Scale_Weight [+] RW: 1:Device_Scale_Trigger [-] RO: 1:Device_Piston_IsExtended [+] RW: 1:Device_Piston_Trigger OPC-UA running: opc.tcp://your.domain:4840
Firmware para ESP32 : Versión 1.0
Firmware básico para microcontroladores ESP32, diseñado para enviar temperatura y humedad mediante MQTT.
Características:
- Lectura de sensores DHT11 / DHT22.
- Publicación periódica en topics MQTT.
- Compatible con el middleware.js - broker.
Instalación:
- Usa Arduino IDE o PlatformIO.
- Conecta el ESP32 por USB.
- Carga el firmware incluido en el paquete de descargas.
- Instala el driver serial si fuera necesario.
- En la cabecera del código existen más indicaciones.
Firmware para ESP8266 : Versión 1.0
Firmware alternativo más sencillo, que permite:
- Encender y apagar un LED por MQTT.
- Leer temperatura y humedad de un sensor DHT.
El proceso de instalación es idéntico al del ESP32.
Solo cambia la configuración del tipo de placa y puerto en Arduino IDE. - + BRIDGE_CALL: Ejecución de Métodos Remotos
Mientras que
BRIDGE_READyBRIDGE_WRITEse limitan a manejar variables de datos simples,BRIDGE_CALLpermite a GPSS-Plus ejecutar métodos o funciones remotas definidas en el middleware o en dispositivos industriales.Esta capacidad es fundamental para tareas que exceden el ámbito de la simulación pura, tales como:
- Acceder a bases de datos externas o al sistema de archivos del servidor (File System).
- Realizar peticiones HTTP a APIs de terceros (consultar el clima, precios, stocks reales).
- Ejecutar algoritmos complejos u operaciones matemáticas pesadas fuera del motor de simulación.
Sincronización Asíncrona (Patrón Rest/Wake)
Dado que estas llamadas ocurren a través de la red, la respuesta no es instantánea. Para evitar que la entidad continúe su camino antes de recibir el resultado, se utiliza el patrón Rest/Wake:
- La entidad lanza el
BRIDGE_CALL. - Inmediatamente después, entra en un estado de espera con
rest esperaCall. - Cuando el procedimiento de
triggerrecibe la respuesta del servidor, identifica a la entidad medianteP$(PARAM_B)y la libera con unwake.
Este mecanismo permite modelar con total realismo las latencias de red y el procesamiento asíncrono en sistemas industriales.
Example:
SYSTEM {TYPE:OPTIONS, REAL_TIME:1} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} initial txt_error," " Graphic {Type:TEXT,Name:Text1,X:295,Y:123} Graphic {Type:TEXT,Name:Text2,X:295,Y:95} Graphic {Type:TEXT,Name:Text3,X:295,Y:66} Graphic {Type:TEXT,Name:Text4,X:295,Y:35} Graphic {Type:TEXT,Name:TextError,X:192,Y:478,Text:"On error...."} RestRoom {name:esperaCall,x:543,y:488} Initial options,{user:"user", pass:"1234"} BRIDGER {NAME:bridge1,X:542,Y:434 ,SERVER:"wss://tu-dominio.com:3000" ,CLIENT:"opc.tcp://tu-dominio.com:4840" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:183,Y:300} POSITION {NAME:POS2,X:422,Y:300} POSITION {NAME:POS3,X:704,Y:300} START 10 PROCEDURE PRE_RUN ; Suscripciones para monitorizar errores de red o sistema BRIDGE_SUBSCRIPTION { NAME: bridge1, VARIABLE: "HTTP_Request_Error", TRIGGER: bridge1_on_error } BRIDGE_SUBSCRIPTION { NAME: bridge1, VARIABLE: "Topics_CurrentTime", TRIGGER: on_clock } ; Lectura de un archivo en el sistema de archivos remoto (FS) ASSIGN params, [{}] BRIDGE_CALL {name:bridge1, trigger:on_read_file, params:V$params, method:"Methods_FS_Read"} ; Petición a una API externa vía HTTP ASSIGN params, [{ "method": "GET", "params": { "name": "Antonio" } }] BRIDGE_CALL { name:bridge1, trigger:on_http, params:V$params, method:"Methods_HTTP_Request" } TERMINATE_VE ENDPROCEDURE 1 GENERATE 3,0,0,10 {NAME:GEN1,X:59,Y:300} ADVANCE 3,0 {TO:POS1} ; Llamada a un método de cálculo (Suma) en el servidor ASSIGN params, [{ "Num1": (D$N), "Num2": (0) }] BRIDGE_CALL {name:bridge1, trigger:on_call, params:V$params, method:"Methods_Do_Sum"} ; Sincronización asíncrona: la entidad espera la respuesta rest esperaCall mod {subtitle:"Suma: P$(suma)"} ADVANCE 4,4 {TO:POS2} ASSIGN params, [{ "Num1": (D$N), "Num2": (D$N) }] BRIDGE_CALL {name:bridge1, trigger:on_call, params:V$params, method:"Methods_Do_Sum"} rest esperaCall mod {subtitle:"Suma2: P$(suma)"} ADVANCE 4,4 {TO:POS3} ENDGENERATE 1 ; --- Procedimientos de Respuesta --- procedure on_clock move {name:Text2,TEXT:"Hora Servidor: P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_read_file move {name:Text3,TEXT:"Contenido Archivo: P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_http move {name:Text4,TEXT:"Respuesta HTTP: P$(PARAM_A.VALUE.message)"} TERMINATE_VE endprocedure procedure on_call move {name:Text1,TEXT:"Suma remota: P$(PARAM_A.sum) Entidad: P$(PARAM_B)"} assign suma,P$(PARAM_A.sum),P$(PARAM_B) ; Despertamos a la entidad específica que hizo la llamada wake esperaCall,-1,P$(PARAM_B) TERMINATE_VE endprocedure procedure bridge1_on_error savevalue txt_error,"X$txt_error\nP$(PARAM_A.VALUE)" move {name:TextError,TEXT:"X$txt_error"} TERMINATE_VE endprocedure - + Un gemelo digital
Cuando trabajamos con
BRIDGERno siempre vamos a tener un dispositivo real al otro lado. Si queremos construir un gemelo digital, necesitamos una fuente de datos que represente lo que está ocurriendo en el mundo real, y muchas veces ese sistema aún no existe o no está disponible.En esos casos, podemos crear nosotros esa “realidad” mediante un modelo que se comporte como si fuese el sistema físico y que emita su propia telemetría. A este mundo simulado que actúa como origen de datos lo llamamos ALFA.
En este ejemplo vamos a conectar un mundo ALFA (la realidad simulada) con su gemelo digital.
El ALFA está formado por entidades (vehículos) que se desplazan entre dos posiciones, alternando de un lado a otro con un tiempo aleatorio en cada recorrido. Cada vez que cambian de estado, emiten una telemetría a través de
MQTTindicando:- su identificador
- su posición lógica (estado)
- el instante en el que comienza el movimiento
- y el tiempo estimado hasta el siguiente estado
Con esta información es suficiente para reconstruir su comportamiento.
El gemelo digital se suscribe a esa telemetría y, para cada entidad:
- si no existe, la crea
- si ya existe, recalcula su movimiento
Cuando recibe nuevos datos, interrumpe el
ADVANCEen curso (UPDATEa tiempo actual), y prepara los datos para que el nuevoADVANCEuse los datos recibidos. Como la telemetría incluye el instante original, es posible compensar la latencia del mensaje y ajustar el tiempo restante.De este modo, el gemelo no solo replica posiciones sino el comportamiento en el tiempo.
Además, se incluye un caso de rehidratación: durante un intervalo se detiene la suscripción, por lo que el gemelo deja de recibir datos y las entidades continúan según su último estado conocido. Cuando la conexión se restablece, el sistema vuelve a sincronizarse.
Para ejecutar este ejemplo se utilizan dos motores en paralelo: uno que actúa como ALFA y otro como gemelo digital.
; ALFA SYSTEM {TyPE:PRE_RUN,TRIggER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1,time_decimals:1} Initial options,{ } BRIDGER {NAME:bridge1,X:746,Y:571 ; ,SERVER:"wss://bridger.gpss-plus.com:3000" ,SERVER:"wss://ip10.nuevoiris.com:3000" ,CLIENT:"mqtt://localhost" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS_0,X:238,Y:302} POSITION {NAME:POS_1,X:717,Y:292} Graphic {NAME:Text1,Type:TEXT,X:422,Y:533,Text:"On OPEN"} Graphic {NAME:TextError,Type:TEXT,X:424,Y:582,Text:"On Error"} START 1 ;***************************************************** PROCEDURE PRE_RUN TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 2,0,0,3 {NAME:GEN1,X:86,Y:306} assign State,0 assign id,"Id_D$N" WHILE (1==1) assign State,(P$State+1>1?0:1) assign t_delta,round((random * 8) + 2,1) assign sys, SYS$ ASSIGN now,P$(sys.date.time) ASSIGN values, {"positions": { id:"P$id" ,State:"P$State" ,t_start:P$now ,t_delta:P$t_delta ,txt:"positions" } } BRIDGE_WRITE { name:bridge1, VALUES:V$values,TRIGGER:bridge1_on_write } ADVANCE P$t_delta {TO:"POS_P$State"} ENDWHILE ADVANCE 1,0 {TO:POS2} ENDGENERATE 0 ;---------------------------------------------------------------------------- procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure procedure bridge1_on_write move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure;DIGITAL TWIN SYSTEM {TyPE:PRE_RUN,TRIggER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1,time_decimals:1} Initial options,{ } BRIDGER {NAME:bridge1,X:746,Y:571 ,SERVER:"wss://bridger.gpss-plus.com:3000" ,CLIENT:"mqtt://localhost" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS_0,X:238,Y:302} POSITION {NAME:POS_1,X:717,Y:292} QUEUER {NAME:QTrucks,X:61,Y:506} Graphic {NAME:Text1,Type:TEXT,X:419,Y:423,Text:"Text1"} Graphic {NAME:Text2,Type:TEXT,X:421,Y:455,Text:"Text2"} Graphic {NAME:TextError,Type:TEXT,X:424,Y:582,Text:"OnError"} START 1 ;***************************************************** PROCEDURE PRE_RUN timeout startSubscripcion,1 timeout cancelSubscripcion,20 timeout startSubscripcion,50 TERMINATE_VE ASSIGN values, {"State": {id:"0",txt:"null"}} BRIDGE_WRITE { name:bridge1, VALUES:V$values,TRIGGER:bridge1_on_write } ENDPROCEDURE ;***************************************************** GENERATE 0,0,0,0 {NAME:GEN1,X:86,Y:306} QUEUE QTrucks assign id,"P$PARAM_A" assign t_delta,P$PARAM_B assign State,P$PARAM_C mod {subtitle:"[P$id]"} move {name:Text1,TEXT:"AC1$: Create -> P$(PARAM_A) P$t_delta"} assign t_start,AC1$ while (1==1) assign To,P$State assign From,(P$To>=1?0:1) move {name:Text1,TEXT:"AC1$: Move -> P$(PARAM_A) P$t_delta | P$From P$to"} advance (P$t_delta+0.1),0 {from:"POS_P$From", to:"POS_P$To"} endwhile DEPART QTrucks ENDGENERATE 0 ;---------------------------------------------------------------------------- procedure on_Subscription assign datos,V$(PARAM_A.VALUE) if ("P$(datos.txt)"=="null") TERMINATE_VE endif assign id,"P$(datos.id)" assign t_delta,P$(datos.t_delta) assign State,P$(datos.State) move {name:Text1,TEXT:"AC1$: Position -> P$(PARAM_A.VALUE)"} assign idExist,0 FOREACH entityNumber,IN_RESOURCE,QTrucks if ("P$(id,P$entityNumber)"=="P$(id)") assign idExist,P$entityNumber endif ENDFOREACH if (P$idExist==0) NEW GEN1,0,"P$id",P$t_delta,P$State TERMINATE_VE endif assign sys, SYS$ ASSIGN now, P$(sys.date.time) ; Real time assign delta_latencia, (P$now - P$(datos.t_start)) / 1000 ; From ms to seconds assign State,P$(State),P$idExist assign t_start,P$(datos.t_start),P$idExist assign t_delta,P$(datos.t_delta) - P$delta_latencia,P$idExist update P$idExist,(AC1$) ; go out of advance TERMINATE_VE endprocedure ;-------------------------------------------------------------------------- procedure cancelSubscripcion move {name:Text2,TEXT:"Cancel subscripcion"} BRIDGE_UNSUBSCRIBE { NAME: bridge1, VARIABLE: "positions" } TERMINATE_VE endprocedure ;-------------------------------------------------------------------------- procedure startSubscripcion move {name:Text2,TEXT:"Start subscripcion"} BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "positions" , TRIGGER: on_Subscription } TERMINATE_VE endprocedure ;-------------------------------------------------------------------------- procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure - + IoT con MQTT
El protocolo MQTT de comunicaciones es un estándar de los dispositivos para IoT.
Funciona por "topics", como las redes sociales. Un dispositivo como un termómetro envía la temperatura obtenida sin saber quién va a requerirla y leerla.
Por lo tanto se requerirá que un "broker MQTT" esté constantemente escuchando lo que los sensores envíen y estar dispuesto a transmitírselo a quien los necesite.
Un broker estándar es Mosquitto pero el middleware.js incorpora una labor muy parecida.
Así que volvemos a tener la misma arquitectura de sistema:
GPSS-Plus <-> (middleware.js + broker MQTT) <-> dispositivo
En este punto pasamos a programar y utilizar hardware extra.
No nos preocupemos demasiado, sí sería aconsejable tener ciertas nociones de programación en C pero en general es suficiente con pedir a nuestra IA favorita que nos construya aquello que queramos.
Vamos a programar un microcontrolador ESP8266 con WIFI que gestione:
- Un sensor de luz BH1750
- Un sensor de humedad y temperatura DHT22
- El encendido y apagado de un led protegido por una resistencia.
Para ello, usaremos estos 5 elementos hardware y un software para guardar el firmware del ESP8266.
Uno sencillo es "Arduino IDE" que contiene todas las librerías necesarias.
Un apunte rápido del camino a seguir es:
- 1.- Obtener el hardware
- 2.- Descargar Arduino IDE
- 3.- Instalar el driver necesario para conectar nuestro equipo a través USB simulando un puerto serial.
- 4.- Compilar el código C del firmware Arduino IDE del capítulo de descargas. En el código fuente tienes más información.
- 5.- Pasarlo al dispositivo a través del mismo Arduino IDE.
- 6.- Enviar por el puerto serial en la misma consola de Arduino IDE los datos de nuestra WIFI y la IP del broker
- 7.- Ejecutar GPSS-Plus y ver los datos de temperatura, humedad y ver encender y apagar el led.
Tras esto, hecho uno, hechos todos. Todos los dispositivos en general funcionan a través de microcontroladores ESP32 o ESP8266 y otros y se conectan de la misma manera.
En el ejemplo, podemos ver como realiza las 3 opciones de MQTT estándar:
- Subscribirse a un sensor (leer la humedad).
- Escribir en un comando (encender un led)
- Comprobar el status (Last Will and Testament - LWT)
Por lo que deberíamos ver los 3 datos de temperatura, humedad y luminosidad además del encendido y apagado del led.
Debe entenderse que la comprobación de WRITE (Respuesta "OK") es algo que comunica el BRIDGER en la capa de red y no el dispositivo al que solo puede uno subscribirse.
El browse no tiene contenido puesto que el broker no dispone de esa información.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} SYSTEM {TYPE:OPTIONS, REAL_TIME:1} Initial options,{ } BRIDGER {NAME:bridge1,X:733,Y:556 ,SERVER:"wss://ip10.tidominio.com:3000" ,CLIENT:"mqtt://localhost" ,OPTIONS:V$options ,on_error:bridge1_on_error } POSITION {NAME:POS1,X:101,Y:378} POSITION {NAME:POS2,X:143,Y:115} Graphic {NAME:txtSubscribeL,Type:TEXT,X:394,Y:465,Text:"On SUBS"} Graphic {NAME:txtSubscribeH,Type:TEXT,X:394,Y:435,Text:"On SUBS"} Graphic {NAME:txtSubscribeT,Type:TEXT,X:394,Y:405,Text:"On SUBS"} Graphic {NAME:txtSubscribeS,Type:TEXT,X:394,Y:375,Text:"On SUBS"} Graphic {NAME:TextBrowse,Type:TEXT,X:116,Y:283,Text:"On Browse"} Graphic {NAME:TextWrite,Type:TEXT,X:391,Y:59,Text:"On Write"} Graphic {NAME:TextError,Type:TEXT,X:424,Y:582,Text:"Error"} START 10 ;***************************************************** PROCEDURE PRE_RUN BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "devices/elprimero/sensor/humidity" , TRIGGER: on_humidity } BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "devices/elprimero/sensor/lux" , TRIGGER: on_luz } BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "devices/elprimero/sensor/temperature" , TRIGGER: on_temperature } BRIDGE_SUBSCRIPTION { NAME: bridge1 , VARIABLE: "devices/elprimero/status" , TRIGGER: on_status } ; Sin salida BRIDGE_BROWSE {name:bridge1, trigger:on_BROWSE } TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 5,0 {NAME:GEN1,X:91,Y:547} ADVANCE 5,0 {TO:POS1,flow:1} if (D$N% 2== 1) ASSIGN values, {"devices/elprimero/commands/led": "on"} BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} else ASSIGN values, {"devices/elprimero/commands/led": "off"} BRIDGE_WRITE { name:bridge1, VALUES:V$values ,TRIGGER:on_write} endif ADVANCE 5,0 {TO:POS2,flow:1} ENDGENERATE 1 ;---------------------------------------------------------------------------- procedure on_read move {name:TextRead,TEXT:"WIFI: P$(PARAM_A)"} TERMINATE_VE endprocedure procedure bridge1_on_error move {name:TextError,TEXT:"P$PARAM_A"} TERMINATE_VE endprocedure ;------------------------- procedure on_write move {name:TextWrite,TEXT:"WRITE T:AC1$: P$(PARAM_A.devices/elprimero/commands/led)"} TERMINATE_VE endprocedure procedure on_luz move {name:txtSubscribeL,text:"Subs LUX P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_humidity move {name:txtSubscribeH,text:"Subs HUM P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_temperature move {name:txtSubscribeT,text:"Subs TEM P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_status move {name:txtSubscribeS,text:"Subs STA P$(PARAM_A.VALUE)"} TERMINATE_VE endprocedure procedure on_BROWSE move {name:TextBrowse,text:"on_BROWSE P$(PARAM_A)"} TERMINATE_VE endprocedure - + OPC-UA Virtual Device
OPC-UA Virtual Device Manual
This document describes the virtual devices and sensors simulated by the Virtual OPC-UA Plant server.
1. PIDControl
Simulates a PID temperature control loop.
PIDControl_CurrentTemperature: Current temperature (read-only)PIDControl_Setpoint: Target temperature (read-write)PIDControl_PIDOutput: PID output signal (read-only)
2. Sensor_Motion
Simulates a motion detector.
Sensor_Motion_Detected: Boolean value indicating motion detected (read-only)
3. Sensor_Door
Simulates a door open/close sensor.
Sensor_Door_IsOpen: Boolean value indicating if the door is open (read-write)
4. Sensor_Humidity
Simulates an environmental humidity sensor.
Sensor_Humidity_Value: Humidity level in % (read-only)
5. Sensor_Proximity
Simulates a proximity sensor.
Sensor_Proximity_Distance: Distance to object in cm (read-only)
6. Sensor_Light
Simulates a light level sensor.
Sensor_Light_Lux: Light level in lux (read-only)
7. Sensor_Gas
Simulates a gas leakage detector.
Sensor_Gas_Concentration: Gas concentration in ppm (read-only)
8. Sensor_Vibration
Simulates a vibration sensor.
Sensor_Vibration_Level: Vibration intensity (read-only)
9. Sensor_Smoke
Simulates a smoke detector.
Sensor_Smoke_Detected: Boolean value indicating presence of smoke (read-only)
10. Sensor_Battery
Simulates a battery status monitor.
Sensor_Battery_Level: Battery level in % (read-only)
11. Sensor_Network
Simulates network signal strength.
Sensor_Network_Strength: Signal strength from 0 to 100 (read-only)
12. System_PowerStatus
Indicates if the system is powered.
System_PowerStatus_IsPowered: Boolean value indicating power status (read-only)
Note: Writable variables are intended for use with commands such as
OPC_WRITEorOPC_SUBSCRIPTION.
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} OPC {NAME:opc1,X:100,Y:121,visible:1, TYPE:REAL, CLIENT:"opc.tcp://192.168.1.10:4840"} POSITION {NAME:POS1,X:251,Y:335} POSITION {NAME:POS2,X:469,Y:341} Graphic {NAME:Text1,Type:TEXT,X:425,Y:314,Text:"Entidad"} Graphic {NAME:Text2,Type:TEXT,X:424,Y:124,Text:"qqqqqq"} Graphic {NAME:Text3,Type:TEXT,X:425,Y:514,Text:"write"} Graphic {NAME:Text4,Type:TEXT,X:115,Y:398,Text:"door"} initial nAgente,0 START 500 ;***************************************************** PROCEDURE PRE_RUN ; timeout agente.main,0 OPC_SUBSCRIPTION { NAME: opc1 , VARIABLE: "PIDControl_CurrentTemperature" , TRIGGER: on_suscription } OPC_SUBSCRIPTION { NAME: opc1 , VARIABLE: "Sensor_Door_IsOpen" , TRIGGER: puerta_abierta } TERMINATE_VE ENDPROCEDURE 1 ;***************************************************** GENERATE 0,0,0,0 {NAME:GEN1,X:43,Y:300} ;OPC_BROWSE { name:opc1, savevalue:variables } if (D$N==1) ASSIGN values, { PIDCONTROL_SETPOINT: 10 } ; OPC_WRITE { NAME: opc1, VALUES: V$values } OPC_WRITE { NAME: opc1, VALUES: V$values ,async:1,trigger:on_write} endif ;move {name:Text1,TEXT:"Entidad Resultado X$(variables)"} OPC_READ {name:opc1, savevalue:temperatura } ;OPC_READ {name:opc1, async:1,trigger:on_results } move {name:Text1,TEXT:"Resultado READ: X$(temperatura.Sensor_Proximity_DistanceInCm)"} ADVANCE 20,0 {TO:pos1} ENDGENERATE 1 procedure on_suscription move {name:Text2,TEXT:"on_suscription AC1$:\n P$PARAM_A \N P$PARAM_B P$PARAM_C"} TERMINATE_VE endprocedure procedure on_results move {name:Text2,TEXT:"on_results AC1$:\n P$PARAM_A \N P$PARAM_B P$PARAM_C"} TERMINATE_VE endprocedure procedure on_write move {name:Text3,TEXT:"on_write AC1$:\n P$PARAM_A \N P$PARAM_B P$PARAM_C"} TERMINATE_VE endprocedure procedure puerta_abierta move {name:Text4,TEXT:"DOOR AC1$ ; P$PARAM_A"} if (P$(PARAM_A.value)==1) {debug:1} NEW GEN1 endif TERMINATE_VE endprocedure
- + *Acoplamiento con el mundo real
- + Season 13: recursos externos. Inyección de código Javascript
- + La necesidad y límites
El equilibrio entre especificidad y potencia
Los lenguajes generalistas GPL no compiten con los lenguajes específicos de dominio (DSL); sus naturalezas son distintas. No es la intención de GPSS-Plus sustituir la programación orientada a objetos que constituye la base de la casi totalidad del software actual.
Este DSL se presenta siendo muy consciente de sus límites frente a lenguajes generalistas como C o Python, y su vasta base de librerías. Sin embargo, es necesario delimitar las fronteras entre el modelado de dominio, el lenguaje generalista y el puramente matemático. En este sentido, todo modelo debe ser auditable y testado bajo un proceso riguroso, como el marco de V&V H-M-E que defendemos.
El dilema del modelador
Crear un sinfín de scripts aislados, sin más conexión que la que el modelador guarda en su cabeza, no es razonable para un proceso de validación serio. Pero, al mismo tiempo, limitar el objetivo último del modelo por una carencia heredada del DSL es un error aún mayor.
¿Cuál es entonces la solución?
El Modelo Híbrido
GPSS-Plus deja abierta la frontera del DSL estándar permitiendo la importación de clases y medios externos en el el GPL Javascript. Esta capacidad transforma el modelo en un ecosistema híbrido:
-
El Modelo Nativo (Caja de Cristal): La lógica de bloques, flujos y gestión de recursos. Es totalmente transparente, auditable y verificable mediante el método V&V H-M-E.
-
Los Recursos Inyectados (Caja Negra): Mediante
LOAD_CLASSyLOAD_MEDIA, el modelador integra librerías de cálculo, sistemas de sonido o interfaces gráficas. El motor trata a estos componentes como "entidades externas" cuya lógica es opaca a la auditoría semántica. Su validación debe ser previa a su integración en el modelo.
Estos nuevos recursos lógicos (no los recursos físicos que afectan al flujo de las entidades) inyectados deben ser tratados con la misma jerarquía operativa que un recurso nativo. Podríamos inyectar una FSM (Máquina de Estados Finitos) sustitutiva de la nativa, un solver específico de un dominio de conocimiento —como pueda ser el químico o sobre botánica—, o una librería de cálculo matricial.
Estos recursos no participan en la mecánica interna del motor, sino que actúan como componentes externos que el modelo puede utilizar. El motor los trata como entidades lógicas cuyo comportamiento interno es opaco, respetando así la separación de cometidos.
No en vano se les ha privado de API de acceso al motor: por ejemplo, no pueden crear entidades virtuales (VE) en su interior.
Bajo esta filosofía, disponemos de dos vías principales para inyectar código Javascript basado en clases:
-
Recursos Lógicos: Creación de librerías o clases inyectables para el cálculo y la lógica sobre el motor.
-
Recursos Multimedia: Creación de componentes inyectables para el visualizador y la interfaz de usuario.
El modelo sigue siendo la fuente de verdad; el código externo solo resuelve problemas que el modelo formula.
-
- + Ejemplo básico de clase
GPSS-Plus permite incorporar lógica externa mediante clases escritas en Javascript.
Se utilizan para incorporar lógica específica que no forma parte del modelo: cálculos, reglas de negocio o librerías de un dominio concreto (química, logística, optimización, cálculo, visualización, etc.).
El modelo define el comportamiento del sistema; la clase resuelve operaciones concretas.
Naturaleza de las clases
Estas clases se integran en el modelo como recursos lógicos y son ejecutadas por las entidades durante su recorrido.
- No disponen de API.
- No crean VEs ni alteran directamente un SAVEVALUE, ya que ello rompería la coherencia del modelo sin control.
- No modifican el flujo ni el tiempo del modelo
- Las clases son síncronas: se ejecutan en el mismo instante en que son invocadas.
Contrato de la clase
Este primer ejemplo muestra el caso más simple: una clase
Sumque recibe dos valores, acumula un dato, los procesa y devuelve un resultado.Este es el archivo Javascript con la clase en cuestión del ejemplo:
class Sum { constructor(name) { this.name = name; this.acc = 0; } accString() { return "'ACC: "+this.acc+"'"; } exec(input) { const output = {}; if (input.acc) this.acc += input.acc; output.out = input.a + input.b + this.acc; if (input.a<0) output.error="exec: Negative number"; return output; } }La clase sigue el contrato esperado por el motor:
- Método constructor
- Método exec(input) que recibe un objeto y devuelve un objeto.
- Un método de obtención de datos interno para usar a través del SNA E$(instancia,método) que no admite parámetros y retorna un string.
- Si
execdevuelve la propiedad"error"en el objeto de salida, el modelo se detendrá.
Todas las clases deberán incorporar al menos el constructor y el método
exec.Uso desde el modelo:
Para ejecutar su lógica desde el modelo se siguen estos pasos:
1.- Cargar la clase a través de
LOAD_CLASS(la URL debe soportar CORS):LOAD_CLASS https://gpss-plus.com/imports_js/Sum.js
Instanciar la clase a través de
INSTANCE_CLASS:INSTANCE_CLASS {name:sum, class:Sum}Y llamar al método exec con el input que necesitemos a través de
EXEC_CLASS:assign inputs,{a:10,b:20,acc:D$N} EXEC_CLASS {name:sum,in:V$inputs,savevalue:data} ; opcional assign:dataEl recurso externo no altera el flujo del modelo: recibe datos, los procesa y devuelve un resultado que el modelo utiliza mediante un
savevalueo unassignen la entidad invocante.Además, se puede acceder a sus datos internos mediante el SNA:
E$(instancia,método)
Example:
/* Recursos inyectados */ POSITION {NAME:POS1,X:620,Y:360} GRAPHIC {NAME:Text1,TYPE:TEXT,X:373,Y:268,TEXT:"DSL Graphic",font:"24"} ; Create text graphic Facility {NAME:fac1,X:373,Y:365,capacity:3} LOAD_CLASS https://gpss-plus.com/imports_js/Sum.js INSTANCE_CLASS {name:sum, class:Sum} START 2000 ;***************************************************** GENERATE 10,3 {NAME:GEN1,X:111,Y:366} ADVANCE 5 {TO:fac1} assign inputs,{a:10,b:20,acc:D$N} EXEC_CLASS {name:sum,in:V$inputs,savevalue:data} Move {name:Text1,text:"Result X$(data.out) \nACC: E$(sum,acc) \nACCstr: E$(sum,accString)"} seize fac1 ADVANCE 20,20 release fac1 ADVANCE 20 {TO:POS1} ENDGENERATE 1 - + Recursos multimedia — representación e interacción
Además de lógica, GPSS-Plus permite integrar recursos multimedia que interactúan con el modelo en tiempo real: visualización, sonido e interfaces.
Naturaleza de los recursos multimedia
Los recursos multimedia se integran como componentes externos que reciben instrucciones desde el modelo.
- No disponen de API del motor
- No crean VEs ni alteran el estado del modelo
- No modifican el flujo ni el tiempo
- No devuelven datos al modelo
Su función es exclusivamente ejecutar acciones de representación o interacción.
A diferencia de las clases lógicas:
- CLASS → transforma datos (input → output)
- MEDIA → ejecuta acciones (input → efecto visual/sonoro)
Esto garantiza que la capa de representación no interfiera con la lógica del modelo.
Uso básico
Los recursos multimedia se utilizan de forma análoga a las clases:
1. Cargar el recurso
LOAD_MEDIA https://gpss-plus.com/imports_js/Display.js
2.- Instanciarlo
INSTANCE_MEDIA {name:displayA, class:Display}3. Ejecutarlo
ASSIGN panel,{operation:"write",value:"Result X$(result.out)"} EXEC_MEDIA {name:displayA,in:V$panel}El modelo envía instrucciones al recurso mediante un objeto de entrada.
El recurso ejecuta la acción correspondiente, sin alterar el estado del modelo.En el ejemplo
- Se utiliza una clase (
Sum) para realizar un cálculo - Se muestran los resultados en dos paneles
- Se reproducen sonidos en distintos momentos del flujo
El modelo sigue siendo el que gobierna la ejecución; los recursos multimedia únicamente reaccionan a él.
Si se requiere una visualización continua o dependiente del tiempo, los recursos MEDIA pueden implementar dos métodos especiales:
onRenderFrame(AC1,x,y,z,visible,subtitle){ this.mesh.visible = visible; this.mesh.rotation.y = (AC1); this.mesh.position.set(x,y,z); } onChangeVector(AC1,vector) { /* vector composition { position: [x,y,z], visible: true, from: [x,y,z], to: [x,y,z], time: [t_start,t_end] } */ }onRenderFrameserá invocado automáticamente por el motor de visualización en cada ciclo de redibujado, recibiendo como parámetro el tiempo actual de la simulación y posición.De esta forma se crean por separado la recepción de los valores necesarios (EXEC_MEDIA) para la visualización de la propia visualización dependente del tiempo.
Por otro lado,onChangeVectorserá invocado cuando cambie el vector de posicionado, es decir, cadaADVANCEoUPDATE.
Example:
/* Injected Resources */ POSITION {NAME:POS1,X:620,Y:360} GRAPHIC {NAME:Text1,TYPE:TEXT,X:373,Y:268,TEXT:"DSL Graphic",font:"24"} ; Create text graphic LOAD_CLASS https://gpss-plus.com/imports_js/Sum.js INSTANCE_CLASS {name:sum, class:Sum} LOAD_MEDIA https://gpss-plus.com/imports_js/Display.js INSTANCE_MEDIA {name:displayA, class:Display} INSTANCE_MEDIA {name:displayB, class:Display} LOAD_MEDIA https://gpss-plus.com/imports_js/ClickSound.js INSTANCE_MEDIA {name:clickA, class:ClickSound} INSTANCE_MEDIA {name:clickB, class:ClickSound} FACILITY {NAME:counter1,X:373,Y:365,capacity:3} START 2000 SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;***************************************** PROCEDURE PRE_RUN assign config,{ operation:"init", sx:220, sy:50, ; fontSize:28, font:"24px sans-serif", color:"#ffff00", background:"rgba(0,0,0,0.5)", align:"center", x:120, y:140, z:0 } EXEC_MEDIA {name:displayA,in:V$config} assign config,{ operation:"init", sx:220, sy:50, ;fontSize:28, font:"24px Arial", color:"#a0b7b8ff", background:"rgba(0,0,0,0.5)", align:"center", x:420, y:140, z:0 } EXEC_MEDIA {name:displayB,in:V$config} assign soundConfig,{ operation:"init", volume:0.3, frequency:800, duration:0.03 } EXEC_MEDIA {name:clickA,in:V$soundConfig} assign soundConfig,{ operation:"init", volume:0.3, frequency:400, duration:0.03 } EXEC_MEDIA {name:clickB,in:V$soundConfig} TERMINATE_VE ENDPROCEDURE ;***************************************************** GENERATE 10,3 {NAME:GEN1,X:111,Y:366} ADVANCE 5 {TO:counter1} assign playInput,{operation:"play"} assign inputs,{a:10,b:20,acc:D$N} EXEC_CLASS {name:sum,in:V$inputs,savevalue:result} MOVE {name:Text1,text:"Result X$(result.out) ACC: E$(sum,acc)"} ASSIGN panel,{operation:"write",value:"Result X$(result.out)"} EXEC_MEDIA {name:displayA,in:V$panel} EXEC_MEDIA {name:displayB,in:V$panel} EXEC_MEDIA {name:clickA,in:P$playInput} SEIZE counter1 ADVANCE 20,20 EXEC_MEDIA {name:clickB,in:P$playInput} RELEASE counter1 ADVANCE 20 {TO:POS1} ENDGENERATE 1 - + Recursos multimedia HTML - interfaz desacoplada del canvas
Además del canvas 3D, GPSS-Plus dispone de un contenedor HTML para representar interfaces fuera del entorno gráfico.
<div id="ui-layer"></div>
Los recursos MEDIA pueden escribir en
ui-layerutilizando el DOM (por ejemplo, creando elementos condocument.getElementById("ui-layer")).Uso
Exactamente igual que cualquier MEDIA:
LOAD_MEDIA https://gpss-plus.com/imports_js/LogHTML.js INSTANCE_MEDIA {name:logUI, class:LogHTML} ASSIGN msg,{operation:"write",value:"Hola"} EXEC_MEDIA {name:logUI,in:V$msg}
Example:
FACILITY {NAME:FAC1,X:321,Y:351,capacity:4} POSITION {NAME:POSFIN,X:559,Y:299,TYPE:TERMINATE,TITLE:TERMINATE} START 100 LOAD_MEDIA https://gpss-plus.com/imports_js/LogHTML.js INSTANCE_MEDIA {name:logUI, class:LogHTML} SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;***************************************** PROCEDURE PRE_RUN assign config,{ operation:"init", maxLines:50, rows:8 } EXEC_MEDIA {name:logUI,in:V$config} TERMINATE_VE ENDPROCEDURE ;************************************************************************ GENERATE 10,0 {NAME:GEN1,X:43,Y:296} ADVANCE 10,0 {TO:FAC1,flow:1,layout:H} ASSIGN msg,{operation:"write",value:"Entity D$N process"} EXEC_MEDIA {name:logUI,in:V$msg} SEIZE FAC1 ADVANCE 20,0 RELEASE FAC1 ADVANCE 10,0 {TO:POSFIN,flow:1,layout:H} ENDGENERATE 1 - + ejemplo continuo — modelo epidemiológico
Este ejemplo muestra un caso muy simple de integración entre el modelo y una clase externa en Javascript en el mundo de la simulación contínua.
La clase
EpidemicModelcontiene la lógica matemática de evolución de una epidemia.
El modelo no implementa esas ecuaciones porque son incorporadas por la clase esterna. El modelo se encarga de:- inicializa la clase con unos parámetros
- ejecuta pasos sucesivos de evolución
- recoge el estado devuelto
- y lo representa gráficamente
De este modo, la parte algorítmica queda encapsulada en la clase, mientras que GPSS-Plus sigue gobernando la ejecución del sistema, el tiempo y su visualización.
En el ejemplo
Se utilizará un modelo epidemiológico clásico con tres magnitudes:
S: población susceptibleI: población infectadaR: población recuperada
La clase externa calcula su evolución en cada paso de tiempo.
Example:
SYSTEM {TYPE:OPTIONS,SPEED:8,TIME_DECIMALS:2} GRAPHIC {NAME:Text1,TYPE:TEXT,X:233,Y:244,TEXT:"Epidemic model",font:"12"} PLOTTER {NAME:epiPlot,Y_0:S,Y_1:I,Y_2:R,X:TIME_AC1} LOAD_CLASS https://gpss-plus.com/imports_js/EpidemicModel.js INSTANCE_CLASS {name:epidemic, class:EpidemicModel} LOAD_MEDIA https://gpss-plus.com/imports_js/VerticalGauge.js INSTANCE_MEDIA {name:gaugeS, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeI, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeR, class:VerticalGauge} START 2000 SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} PROCEDURE PRE_RUN ASSIGN epiInit,{ operation:"init", S:990, I:10, R:0, beta:0.4, gamma:0.08 } EXEC_CLASS {name:epidemic,in:V$epiInit,savevalue:epiState} ASSIGN cfgS,{ operation:"init", title:"S", x:120, y:400, width:80, height:260, value:990, min_value:0, max_value:1000, color:"#f39c12", background:"rgba(255,255,255,0.85)", font:"12px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeS,in:V$cfgS} ASSIGN cfgI,{ operation:"init", title:"I", x:260, y:400, width:80, height:260, value:10, min_value:0, max_value:1000, color:"#3498db", background:"rgba(255,255,255,0.85)", font:"12px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeI,in:V$cfgI} ASSIGN cfgR,{ operation:"init", title:"R", x:400, y:400, width:80, height:260, value:0, min_value:0, max_value:1000, color:"#8e44ad", background:"rgba(255,255,255,0.85)", font:"12px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeR,in:V$cfgR} ASSIGN epiInit,{ operation:"init", S:990, I:10, R:0, beta:0.4, gamma:0.08 } EXEC_CLASS {name:epidemic,in:V$epiInit,savevalue:epiState} TERMINATE_VE ENDPROCEDURE GENERATE 0,0,0,1 while (1==1) ASSIGN epiStep,{operation:"step",dt:0.2} EXEC_CLASS {name:epidemic,in:V$epiStep,savevalue:epiState} ASSIGN s,round(X$(epiState.S),2) ASSIGN i,round(X$(epiState.I),2) ASSIGN r,round(X$(epiState.R),2) ASSIGN t,round(X$(epiState.time),2) MOVE {name:Text1,text:"t=P$t S=P$s I=P$i R=P$r"} PLOT epiPlot, P$s, P$i, P$r ASSIGN setS,{operation:"set",value:P$s} EXEC_MEDIA {name:gaugeS,in:V$setS} ASSIGN setI,{operation:"set",value:P$i} EXEC_MEDIA {name:gaugeI,in:V$setI} ASSIGN setR,{operation:"set",value:P$r} EXEC_MEDIA {name:gaugeR,in:V$setR} IF (X$(epiState.I) <= 0.01) stop ENDIF ADVANCE 0.2,0 endwhile ENDGENERATE 1 - + Ejemplo discreto — rutas y logística
Este ejemplo muestra un caso simple de integración entre el modelo y una clase externa en Javascript dentro del ámbito de la simulación discreta.
El modelo define una red de ciudades conectadas entre sí. A partir de esas conexiones, construye un grafo con pesos y lo representa visualmente. La clase externa
PathSolverno construye el sistema ni gobierna su ejecución: únicamente resuelve consultas de ruta sobre ese grafo.El modelo se encarga de:
- definir ciudades y conexiones
- calcular los pesos entre nodos
- construir el grafo
- invocar al solver con una consulta
- recorrer visualmente la ruta devuelta
De este modo, la parte algorítmica queda encapsulada en la clase, mientras que GPSS-Plus sigue gobernando el flujo, el tiempo y la representación del sistema.
La clase externa se limita a responder preguntas como:
get_path: obtener una ruta entre dos nodosget_tour: obtener un recorrido optimizado con varias paradas
Example:
SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} GRAPHIC {NAME:Text1,TYPE:TEXT,X:641,Y:30,TEXT:"Hello"} LOAD_CLASS https://gpss-plus.com/imports_js/PathSolver.js INSTANCE_CLASS {NAME: brain, CLASS: PathSolver} INCLUDE /manual_es/Season_13_logica_externa/bbdd.mod START 1 GENERATE 0,0,0,1 {visible:0} ; 1. Query contract ASSIGN query, { op: "get_path", from: "Salamanca", to: "A_Coruna" } ; 2. Solver call EXEC_CLASS { name: brain, in: V$query, assign: result } ; 3. Show result MOVE { NAME: Text1, TEXT: "Route: X$(result.path.LENGTH) steps. Dist: X$(result.total_dist)", color:red } ; 4. Step-by-step movement FOREACH point, IN, V$(result.path) ADVANCE 10 { TO: "position_P$point" } ENDFOREACH MOD {color:red} ; Unordered stops ASSIGN stops, ["Malaga", "Valencia"] ; Optimized tour ASSIGN q, { op: "get_tour", start_node: "Madrid", end_node: "Barcelona", stops: V$stops } EXEC_CLASS { name: brain, in: V$q, assign: routePlan } FOREACH stop, IN, V$(routePlan.optimized_path) MOD {subtitle:"P$stop"} ADVANCE 10 { TO: "position_P$stop" } ENDFOREACH ENDGENERATE 1 ;---------------------------------------------------------------------- PROCEDURE PRE_RUN CALL build_city_map CALL build_weighted_graph ASSIGN pack, { op: "init_graph", data: V$(weighted_graph) } EXEC_CLASS { name: brain, in: V$pack } TERMINATE_VE ENDPROCEDURE - + Ejemplo compuesto — sistema multidominio
Este ejemplo muestra cómo varios modelos independientes pueden coexistir e interactuar dentro de un mismo sistema.
Se combinan dos dominios distintos:
- un modelo químico
- un modelo epidemiológico
Cada uno de ellos está implementado en una clase externa y evoluciona de forma independiente. El modelo se encarga de coordinarlos y establecer relaciones entre ellos.
En este caso, la evolución del sistema químico modifica dinámicamente el parámetro
betadel modelo epidemiológico, generando un acoplamiento entre ambos sistemas.El modelo:
- ejecuta cada sistema por separado
- intercambia información entre ellos
- representa su evolución en tiempo real
Cada componente mantiene su lógica; el modelo define cómo se relacionan.
El ejemplo
- La química produce una magnitud
C - Esa magnitud modifica la propagación de la epidemia
- Ambos sistemas evolucionan en paralelo
- El modelo los conecta mediante una relación simple
Example:
/* MINIMAL UNIVERSE Chemistry + Epidemiology + MEDIA */ SYSTEM {TYPE:OPTIONS,SPEED:8,TIME_DECIMALS:2} GRAPHIC {NAME:Text1,TYPE:TEXT,X:409,Y:421,TEXT:"Universe",font:"12"} PLOTTER {NAME:epiPlot,Y_0:S,Y_1:I,Y_2:R,X:TIME_AC1} PLOTTER {NAME:chemPlot,Y_0:C,Y_1:BETA,X:TIME_AC1} LOAD_CLASS https://gpss-plus.com/imports_js/ChemistryReactor.js INSTANCE_CLASS {name:reactor, class:ChemistryReactor} LOAD_CLASS https://gpss-plus.com/imports_js/EpidemicModel.js INSTANCE_CLASS {name:epidemic, class:EpidemicModel} LOAD_MEDIA https://gpss-plus.com/imports_js/VerticalGauge.js INSTANCE_MEDIA {name:gaugeS, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeI, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeR, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeC, class:VerticalGauge} INSTANCE_MEDIA {name:gaugeBeta, class:VerticalGauge} START 2000 SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} ;======================================================== PROCEDURE PRE_RUN ; --- Chemical system --- ASSIGN chemInit,{ operation:"init", A:10, B:5, C:0, k:0.05 } EXEC_CLASS {name:reactor,in:V$chemInit,savevalue:chemState} ; --- Epidemiological system --- ASSIGN epiInit,{ operation:"init", S:990, I:10, R:0, beta:0.45, gamma:0.08 } EXEC_CLASS {name:epidemic,in:V$epiInit,savevalue:epiState} ; --- Epidemiology gauges --- ASSIGN cfgS,{ operation:"init", title:"S", x:100, y:150, width:70, height:220, value:990, min_value:0, max_value:1000, color:"#f39c12", background:"rgba(255,255,255,0.85)", font:"18px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeS,in:V$cfgS} ASSIGN cfgI,{ operation:"init", title:"I", x:190, y:150, width:70, height:220, value:10, min_value:0, max_value:1000, color:"#3498db", background:"rgba(255,255,255,0.85)", font:"18px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeI,in:V$cfgI} ASSIGN cfgR,{ operation:"init", title:"R", x:280, y:150, width:70, height:220, value:0, min_value:0, max_value:1000, color:"#8e44ad", background:"rgba(255,255,255,0.85)", font:"18px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeR,in:V$cfgR} ; --- Chemical gauge --- ASSIGN cfgC,{ operation:"init", title:"C", x:420, y:150, width:70, height:220, value:0, min_value:0, max_value:5, color:"#27ae60", background:"rgba(255,255,255,0.85)", font:"18px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeC,in:V$cfgC} ; --- Effective beta gauge --- ASSIGN cfgBeta,{ operation:"init", title:"beta", x:510, y:150, width:70, height:220, value:0.45, min_value:0, max_value:0.5, color:"#e74c3c", background:"rgba(255,255,255,0.85)", font:"18px Arial", valueFont:"12px Arial" } EXEC_MEDIA {name:gaugeBeta,in:V$cfgBeta} TERMINATE_VE ENDPROCEDURE ;======================================================== GENERATE 0,0,0,1 {name:Gen1,x:87,y:527} SAVEVALUE baseBeta, 0.45 SAVEVALUE alphaChem, 0.30 while (1==1) ;---------------------------------- ; 1) advance chemistry ASSIGN chemStep,{operation:"step",dt:0.2} EXEC_CLASS {name:reactor,in:V$chemStep,savevalue:chemState} ASSIGN chemC, X$(chemState.C) ;---------------------------------- ; 2) coupling ASSIGN betaEff, X$baseBeta / (1 + X$alphaChem * P$chemC) ;---------------------------------- ; 3) advance epidemiology ASSIGN epiStep,{ operation:"step", dt:0.2, beta:P$betaEff } EXEC_CLASS {name:epidemic,in:V$epiStep,savevalue:epiState} ;---------------------------------- ; 4) rounding ASSIGN t, round(X$(epiState.time),2) ASSIGN s, round(X$(epiState.S),2) ASSIGN i, round(X$(epiState.I),2) ASSIGN r, round(X$(epiState.R),2) ASSIGN c, round(X$(chemState.C),3) ASSIGN betaVal, round(P$betaEff,4) MOVE { name:Text1, text:"t=P$t S=P$s I=P$i R=P$r C=P$c beta=P$betaVal" } PLOT epiPlot, P$s, P$i, P$r PLOT chemPlot, P$c, P$betaVal ;---------------------------------- ; 5) update MEDIA ASSIGN setS,{operation:"set",value:P$s} EXEC_MEDIA {name:gaugeS,in:V$setS} ASSIGN setI,{operation:"set",value:P$i} EXEC_MEDIA {name:gaugeI,in:V$setI} ASSIGN setR,{operation:"set",value:P$r} EXEC_MEDIA {name:gaugeR,in:V$setR} ASSIGN setC,{operation:"set",value:P$c} EXEC_MEDIA {name:gaugeC,in:V$setC} ASSIGN setBeta,{operation:"set",value:P$betaVal} EXEC_MEDIA {name:gaugeBeta,in:V$setBeta} IF (X$(epiState.I) <= 0.01) STOP ENDIF ADVANCE 0.2,0 endwhile ENDGENERATE 1
- + La necesidad y límites
- + Spin-offs
- + Interfaz de Usuario-Modelo UI
- + Ejemplo de usoEste ejemplo muestra el uso de todos los tipos de elementos UI disponibles en GPSS-Plus. Al declarar bloques UI, se crea automáticamente una ventana flotante que contiene los controles definidos (botones, inputs, sliders, etc.). Cada control tiene un TRIGGER, que se ejecuta cuando el usuario interactúa con él. El trigger lanza una entidad virtual que recibe los datos y puede actuar sobre el modelo. Además, desde GPSS se puede modificar el valor de los controles en tiempo real utilizando SET_UI, lo que permite sincronizar la interfaz con el estado interno de la simulación. Solo necesitas declararles un ID para poder referenciarlos. Esta funcionalidad resulta especialmente útil para ajustar parámetros durante la simulación, probar escenarios, activar eventos manuales o construir entornos educativos interactivos. Todo el control es declarativo, y la lógica se mantiene en los procedimientos.
Example:
;========== UI DECLARATIVO ========== UI {TYPE: BUTTON, id:botonA,TEXT: "Lanzar Entidad A", LABEL: "Botón A", TRIGGER: lanzarA} UI {TYPE: BUTTON, id:botonB, TEXT: "Lanzar Entidad B", LABEL: "Valores de fábrica", TRIGGER: lanzarB} UI {TYPE: INPUT, ID: unInput, LABEL: "Nombre", VALUE: "Alice", TRIGGER: capturarInput} UI { TYPE: SLIDER, ID: unSlider, LABEL: "Velocidad", VALUE: 1, MIN: 0.1, MAX: 2, STEP: 0.1, TRIGGER: capturarInput } UI {TYPE: SELECT, id:unSelect,LABEL: "Modo", OPTIONS: "Normal,Avanzado,Turbo", TRIGGER: capturarInput} UI {TYPE: CHECKBOX, id:unCheck,LABEL: "Activar turbo", VALUE: 1, TRIGGER: capturarInput} UI {TYPE: RADIO, id:unRadio, LABEL: "Color", OPTIONS: "Rojo,Verde,Azul", TRIGGER: capturarInput} ;========== GRÁFICOS ========== GRAPHIC {NAME:infoTexto, TYPE:TEXT, X:400, Y:100, TEXT:"Esperando..."} GRAPHIC {NAME:infoDato, TYPE:TEXT, X:400, Y:130, TEXT:"Ningún valor aún"} ;========== POSICIONES Y ANIMACIÓN ========== POSITION {NAME:ENTRADA, X:200, Y:220} POSITION {NAME:SALIDA, X:500, Y:220} START 100 ;----------------------------------------------------------------- GENERATE 0,0,0,0 {NAME:GEN_A, X:102,Y:161,ECOLOR:#0099ff} ADVANCE 10,0 {TO:ENTRADA} ADVANCE 10,0 {TO:SALIDA} TERMINATE 1 GENERATE 0,0,0,0 {NAME:GEN_B, X:104,Y:406,ECOLOR:#ff9900} ADVANCE 10,0 {TO:ENTRADA} ADVANCE 10,0 {TO:SALIDA} SET_UI unSlider, 1.5 SET_UI unInput, "Fin camino B" SET_UI unSelect, "turbo" SET_UI unRadio, "AZUL" SET_UI unCheck, 1 TERMINATE 1 ;========== PROCEDIMIENTOS ========== PROCEDURE lanzarA NEW GEN_A TERMINATE ENDPROCEDURE 1 PROCEDURE lanzarB NEW GEN_B TERMINATE ENDPROCEDURE 1 PROCEDURE capturarInput MOVE {NAME:infoTexto, TEXT:"ID = PP$A"} MOVE {NAME:infoDato, TEXT:"VALUE = PP$B"} ; Si es el input del nombre, actualiza UI desde GPSS IF "botonA",==,"PP$A" SET_UI velSlider, 1.5 ENDIF TERMINATE ENDPROCEDURE 1
- + Ejemplo de uso
- + Funciones de comportamiento
- + Qué son las Behavior Functions
El concepto parte de la abstracción de un recurso más grande que una simple FACILITY o STORAGE.
Imagina que cada taller puede ser representado como una función gaussiana de tiempo de permanencia. En GPSS-Plus, si conocemos los resultados de configuraciones previas (ej. 5 empleados vs 8 empleados), no necesitamos repetir la simulación micro para un taller de 6 empleados.
GPSS-Plus toma la decisión interpolada de los resultados previsibles:
ADVANCE BF$(BFtalleres, 4, 2, 4)Este bloque consultará la función de comportamiento más cercana, interpolará los valores y creará dinámicamente una nueva función adaptada.
Esta es la filosofía de las Behavior Functions: reutilizar conocimiento previo para simular infinitos escenarios nuevos a partir de la interpolación de datos.
- + Una primera aplicación
En este primer ejemplo práctico, vamos a aplicar el concepto de Behavior Functions (BF$) de forma sencilla.
Hasta ahora, cuando necesitábamos modelar un tiempo aleatorio, usábamos funciones normales (FN$) previamente definidas.
Con las Behavior Functions, podemos interpolar automáticamente los parámetros adecuados a partir de unos pocos ejemplos, sin tener que definir funciones exactas para cada caso.En este caso partimos del dos casos ya estudiados que hemos plasmado en las siguientes funciones de comportamiento que hemos llamado
"tramo1D":
GFunction {behavior: tramo1D, p0:10, b:20, Sigma1:2.5, Sigma2:2.5} GFunction {behavior: tramo1D, p0:20, b:40, Sigma1:3.0, Sigma2:3.5}Son dos funciones de distribución gaussianas, ambas con un único parámetro que las definió.
Para la primera P0=10 y la segunda P0=20.
Imaginemos que son, por ejemplo, el número de empleados en un taller. Con ese dato como parámetro, los datos recogidos en el sistema daban las variables de la función gaussiana b:20, Sigma1:2.5, Sigma2:2.5 y b:40, Sigma1:3.0, Sigma2:3.5 respectivamente.Es decir:
P0=10 -> b:20, Sigma1:2.5, Sigma2:2.5
P0=20 -> b:40, Sigma1:3.0, Sigma2:3.5Estas son nuestras Funciones de comportamiento.
Por supuesto , puede que se recojan más posibilidades que harán que el cálculo gane en eficacia.
Pues bien, ahora que tenemos como se comportan estos talleres, podremos predecir cómo se comportará cualquier otro del que conozcamos su parámetro configurador del comportamiento.
Su P0. Así, para el caso de P0=15, es inmediato pensar que, para una sola dimensión de interpolación (un parámetro de configuración equivale a una interpolación lineal) la salida de la función gaussiana resultante será exactamente la media de cada uno de los parámetros estudiados, puesto que 15 es la mitad entre 10 y 20.
Así: P0=15 -> b=30 , sigma1=2.75 , sigma2=3
Para el caso de P0=30 los resultados serán: P0= 30 -> b=60 , sigma1=3.5 , sigma2=4.5
Las Behavior Functions van a hacer este cálculo automáticamente.
Para este ejemplo, simularemos el recorrido de entidades a través de tres recursos:
El primer tramo utilizará una función tradicional (FN$), como hasta ahora.
Una gaussiana con B=20 se centrará en ese tiempo.
El segundo y tercer tramo utilizarán funciones generadas dinámicamente (BF$) a partir de un comportamiento interpolado.
Los resultados en el informe deberán ser curvas centradas en 20, 60 y 30 respectivamente.
Ahora podrás entender porqué, en los informes, tienes una aproximación de la fórmula de la función resultante del los datos estadísticos recogidos. Cuando hagas una simulación de un sistema complejo, estas fórmulas se convertirán en las funciones de comportamiento futuras.
Example:
SYSTEM {TYPE:OPTIONS,Speed:5} Graphic {NAME:Text1,Type:TEXT,X:230,Y:496,Text:"FN$gName1: b=20 / sigma1=2.5 / sigma2=2.5"} Graphic {NAME:Text2,Type:TEXT,X:349,Y:100,Text:"BF$(tramo1D 30): b=40 / sigma1=3.5 / sigma2=4.5 (interpolado)"} Graphic {NAME:Text3,Type:TEXT,X:523,Y:397,Text:"BF$(tramo1D 15): b=30 / sigma1=2.75 / sigma2=3 (interpolado)"} Facility {NAME:VENTANILLA1,X:233,Y:444,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:30} Facility {NAME:VENTANILLA2,X:352,Y:152,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:30} Facility {NAME:VENTANILLA3,X:523,Y:354,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:80,capacity:30} POSITION {NAME:POS1,X:708,Y:268} Function {behavior: tramo1D, type: GAUSS, p0:10, Name:gName1, a:1, b:20, Sigma1:2.5, Sigma2:2.5} Function {behavior: tramo1D, type: GAUSS, p0:20, Name:gName2, a:1, b:40, Sigma1:3.0, Sigma2:3.5} START 2000 ;***************************************************** GENERATE 2,0,0,0 {NAME:GEN1,X:56,Y:319} ADVANCE 30,10 {TO:VENTANILLA1} SEIZE VENTANILLA1 ADVANCE FN$gName1 ;ADVANCE BF$(tramo1D,10) RELEASE VENTANILLA1 ADVANCE 20,10 {TO:VENTANILLA2} SEIZE VENTANILLA2 ADVANCE BF$(tramo1D,30) RELEASE VENTANILLA2 ADVANCE 20,10 {TO:VENTANILLA3} SEIZE VENTANILLA3 ADVANCE BF$(tramo1D,15) RELEASE VENTANILLA3 ADVANCE 20,0 {TO:POS1} TERMINATE 1 - + Interpolación con múltiples parámetros
Damos un paso más: usamos dos parámetros de entrada para modelar situaciones más complejas (Longitud y Meteorología).
La interpolación se realiza mediante técnicas IDW (Inverse Distance Weighting). Esto permite que, dadas combinaciones intermedias de longitud y clima, GPSS-Plus genere de forma automática una función de tiempo adaptada.
Este ejemplo muestra cómo construir sistemas de simulación versátiles y realistas con muy poca información de base, simplemente interpolando el espacio entre casos conocidos.
Example:
SYSTEM {TYPE:OPTIONS,Speed:5} QUEUER {NAME:TRAMO1,X:66,Y:350,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} QUEUER {NAME:TRAMO2,X:276,Y:554,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} QUEUER {NAME:TRAMO3,X:664,Y:360,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} POSITION {NAME:POS1,X:115,Y:92} POSITION {NAME:POS2,X:146,Y:449} POSITION {NAME:POS3,X:432,Y:506} POSITION {NAME:POS4,X:756,Y:33} Function {behavior: tramo2D, type:GAUSS, p0:50, p1:0, Name:gName1, a:1, b:40, Sigma1:3.0, Sigma2:3.0} Function {behavior: tramo2D, type:GAUSS, p0:50, p1:1, Name:gName2, a:1, b:60, Sigma1:5.0, Sigma2:5.0} Function {behavior: tramo2D, type:GAUSS, p0:100, p1:0, Name:gName3, a:1, b:80, Sigma1:5.0, Sigma2:5.0} Function {behavior: tramo2D, type:GAUSS, p0:100, p1:1, Name:gName4, a:1, b:120, Sigma1:10.0, Sigma2:10.0} START 2000 ;***************************************************** GENERATE 2,0,0,0 {NAME:GEN1,X:55,Y:41} ADVANCE 30,10 {TO:POS1} queue TRAMO1 ADVANCE BF$(tramo2D,60,0.5) {TO:POS2} depart TRAMO1 queue TRAMO2 ADVANCE BF$(tramo2D,55,0.5) {TO:POS3} depart TRAMO2 queue TRAMO3 ADVANCE BF$(tramo2D,90,0.5) {TO:POS4} depart TRAMO3 TERMINATE 1 - + Los Behavior Procedures
Las funciones de comportamiento definen tanto el comportamiento hacia el interior de la entidad como hacia el exterior.
Imaginemos un tramo de carretera o un taller, una cosa es el tiempo que tarden las entidades en procesarse y otra los eventos que se producen como accidentes o rotura de las máquinas. En general, éstas serán una función de Poisson.
Así que lo fácil para interpretar tanto las de entrada como las de salida es sintetizar todas ellas en un único BEHAVIOR PROCEDURE.
Vamos a observar un ejemplo de tramos de carretera en los que los vehículos tardarán un determinado tiempo en recorrerlo y eventualmente tendrán que ir a repostar. Usaremos el
SAVEVALUE"tramos" para sintetizar los parámetros de cada tramo del 0 al 2. Designaremos un número para el origen, destino, la distancia y la meteorología de cada tramo.Además de definir las BEHAVIOR FUNCTIONS tanto Gaussiana para el tiempo de trayecto dependiendo de la distancia y meteorología, añadimos una Poisson para definir el lambda respecto de la distancia que haga que las entidades entren a repostar. Recordemos que en una distribución de Poisson, un lambda de 1/10 indica que regularmente, uno de cada 10 vehículos repostarán.
El BEHAVIOR PROCEDURE se encarga de todo y solo recibe dos parámetros, origen y destino.
Obtiene los nombres de los recursos y parámetros basados en esos números. Calcula si es necesario repostar y cuánto tiempo va a tardar en recorrer el tramo. Las estadísticas finales permiten observar el tiempo total de recorrido por tramo (acumulado en los QUEUERs), así como el uso y ocupación de las gasolineras (vía R_BIN_*).
Gracias a la flexibilidad de los Behavior Procedures, podemos encapsular tanto la lógica de simulación como las variaciones estadísticas y los eventos adicionales en un único bloque modular.
Esto permite replicar fácilmente comportamientos realistas en sistemas más grandes como cadenas logísticas, rutas de transporte o procesos industriales con condiciones variables.
Example:
;SYSTEM {TYPE:OPTIONS,Speed:5} initial tramos, [ { origen:1, destino:2, Km:90, Meteo:0.6 }, { origen:2, destino:3, Km:100, Meteo:0.8 }, { origen:3, destino:4, Km:50, Meteo:1.0 } ] Graphic {NAME:Text_0,Type:TEXT,X:219,Y:178,Text:"Text_0"} Graphic {NAME:Text_1,Type:TEXT,X:246,Y:454,Text:"Text_1"} Graphic {NAME:Text_2,Type:TEXT,X:429,Y:354,Text:"Text_2"} QUEUER {NAME:TRAMO_0,X:66,Y:350,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} QUEUER {NAME:TRAMO_1,X:276,Y:554,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} QUEUER {NAME:TRAMO_2,X:664,Y:360,E_BIN_start:0,E_BIN_SIZE:1,E_BIN_COUNT:180} Facility {NAME:Gas_0,X:215,Y:125,capacity:10,R_BIN_start:0,R_BIN_SIZE:1,R_BIN_COUNT:10} Facility {NAME:Gas_1,X:245,Y:406,capacity:10,R_BIN_start:0,R_BIN_SIZE:1,R_BIN_COUNT:10} Facility {NAME:Gas_2,X:434,Y:405,capacity:10,R_BIN_start:0,R_BIN_SIZE:1,R_BIN_COUNT:10} POSITION {NAME:POS_0,X:115,Y:92} POSITION {NAME:POS_1,X:146,Y:449} POSITION {NAME:POS_2,X:432,Y:506} POSITION {NAME:POS_3,X:756,Y:33} Function {behavior: bTramoTiempo, type:GAUSS, p0:50, p1:0, Name:gName1, a:1, b:40, Sigma1:3.0, Sigma2:3.0} Function {behavior: bTramoTiempo, type:GAUSS, p0:50, p1:1, Name:gName2, a:1, b:60, Sigma1:5.0, Sigma2:5.0} Function {behavior: bTramoTiempo, type:GAUSS, p0:100, p1:0, Name:gName3, a:1, b:80, Sigma1:5.0, Sigma2:5.0} Function {behavior: bTramoTiempo, type:GAUSS, p0:100, p1:1, Name:gName4, a:1, b:120, Sigma1:10.0, Sigma2:10.0} Function {behavior: bTramoGas, type:POISSON, p0:100, Name:fPoisson1, LAMBDA:1/8} Function {behavior: bTramoGas, type:POISSON, p0:50, Name:fPoisson2, LAMBDA:1/20} START 2000 ;***************************************************** PROCEDURE TRAMO_BEHAVIOR assign nQueuer, "TRAMO_P$PARAM_A" assign nText, "Text_P$PARAM_A" assign nGas, "Gas_P$PARAM_A" assign Km,X$(tramos.P$PARAM_A.Km) assign Meteo,X$(tramos.P$PARAM_A.Meteo) assign forceGas,BF$(bTramoGas,P$Km) if (P$forceGas>=1) move {name:P$nText,text:"GAS P$Km / P$Meteo"} ADVANCE 10 {TO:P$nGas} seize P$nGas ADVANCE 30,0 release P$nGas ADVANCE 10 {TO:"POS_P$PARAM_A"} move {name:P$nText,text:" "} endif queue P$nQueuer ADVANCE BF$(bTramoTiempo,P$Km,P$Meteo) {TO:"POS_P$PARAM_B"} depart P$nQueuer ENDPROCEDURE 1 ;***************************************************** GENERATE 2,0,0,0 {NAME:GEN1,X:55,Y:41,enumber:0} ADVANCE 10,2 {TO:POS_0} CALL TRAMO_BEHAVIOR,0,1 CALL TRAMO_BEHAVIOR,1,2 CALL TRAMO_BEHAVIOR,2,3 TERMINATE 1
- + Qué son las Behavior Functions
- + Exploración de configuraciones optimas
- + TRIAL_STATE y RESTART
Hay veces que queremos probar diferentes configuraciones para encontrar la más adecuada.
Por ejemplo, queremos saber cuál es el número mínimo de operarios necesario para sacar adelante la producción.
Esta búsqueda puede realizarse de forma secuencial o mediante estrategias más avanzadas, dependiendo del número de variables implicadas.
Con independencia del algoritmo utilizado, en GPSS-Plus este tipo de experimentos se apoyan en un
SAVEVALUEpersistente llamadoTRIAL_STATEy en el bloqueRESTART.En este contexto,
TRIAL_STATEtiene la propiedad de mantener su valor entre ejecuciones incluso cuando se produce unRESTART.Esto permite que el modelo conserve información entre intentos y pueda modificar sus parámetros en cada nueva ejecución.
En el siguiente ejemplo, queremos determinar la capacidad mínima de varias
FACILITYtal que la cola nunca supere dos entidades.Como en la primera ejecución
TRIAL_STATEno existe, inicializamos la capacidad a 1:INITIAL capacity,( (X$(TRIAL_STATE.capacity.EXIST)==1) ? X$(TRIAL_STATE.capacity) : 1)
Durante la simulación, monitorizamos el tamaño de la cola.
Si en algún momento se supera el límite establecido, consideramos el trial inválido y lanzamos un nuevo intento con mayor capacidad:IF (R$(Fac1,QUEUE) > 2) SAVEVALUE TRIAL_STATE.capacity1 , X$(TRIAL_STATE.capacity1) + 1 CALL next_trial ENDIFSi la simulación alcanza las 100 entidades sin superar el límite, la capacidad actual se considera válida.
Example:
; ******************************************************************* ; EXPERIMENT: Find minimum capacity without queue overflow ; We increase capacity until the queue never exceeds 2 ; ******************************************************************* SYSTEM {TYPE:OPTIONS,TIME_DECIMALS:0,SPEED:7}; SYSTEM {TYPE:PRE_RUN,TRIGGER:PRE_RUN} INITIAL capacity1,( (X$(TRIAL_STATE.capacity1.EXIST)==1) ? X$(TRIAL_STATE.capacity1) : 1) INITIAL capacity2,( (X$(TRIAL_STATE.capacity2.EXIST)==1) ? X$(TRIAL_STATE.capacity2) : 1) INITIAL capacity3,( (X$(TRIAL_STATE.capacity3.EXIST)==1) ? X$(TRIAL_STATE.capacity3) : 1) FACILITY {name:Fac1, CAPACITY:X$capacity1, X:255,Y:431, on_queue:check_queue1} FACILITY {name:Fac2, CAPACITY:X$capacity2, X:412,Y:318, on_queue:check_queue2} FACILITY {name:Fac3, CAPACITY:X$capacity3, X:605,Y:430, on_queue:check_queue3} POSITION {NAME:POSEND,X:727,Y:352} FUNCTION {NAME:funFac1,TYPE:TRIANGULAR,MIN:25,MAX:60,MODE:45,INTERVALS:500} FUNCTION {NAME:funFac2,TYPE:TRIANGULAR,MIN:25,MAX:260,MODE:45,INTERVALS:500} FUNCTION {NAME:funFac3,TYPE:TRIANGULAR,MIN:25,MAX:160,MODE:45,INTERVALS:500} GRAPHIC {name:Tprocess,type:TEXT,X:403,Y:190, text:"Trial X$(TRIAL_STATE.count)\n Capacity1 X$(capacity1) \nCapacity2 X$(capacity2) \nCapacity3 X$(capacity3) \n"} START 100 PROCEDURE PRE_RUN IF (X$(TRIAL_STATE.count,EXIST)==0) SAVEVALUE TRIAL_STATE,{ count:0, capacity1:1, capacity2:1, capacity3:1 } ENDIF TERMINATE_VE ENDPROCEDURE ;---------------------------------------------------------- GENERATE 9,0 {NAME:GEN1,X:82,Y:356} ASSIGN Estado, 0 ADVANCE 10,0 {TO:Fac1,flow:1} SEIZE Fac1 ADVANCE FN$funFac1 RELEASE Fac1 ADVANCE 10,0 {TO:Fac2,flow:1} SEIZE Fac2 ADVANCE FN$funFac2 RELEASE Fac2 ADVANCE 10,0 {TO:Fac3,flow:1} SEIZE Fac3 ADVANCE FN$funFac3 RELEASE Fac3 ADVANCE 10,0 {TO:POSEND,flow:1} ENDGENERATE 1 ;---------------------------------------------------------- ; Queue control: if queue exceeds limit → fail trial ;---------------------------------------------------------- PROCEDURE check_queue1 IF (R$(Fac1,QUEUE) > 2) SAVEVALUE TRIAL_STATE.capacity1 , X$(TRIAL_STATE.capacity1) + 1 CALL next_trial ENDIF TERMINATE_VE ENDPROCEDURE PROCEDURE check_queue2 IF (R$(Fac2,QUEUE) > 2) SAVEVALUE TRIAL_STATE.capacity2 , X$(TRIAL_STATE.capacity2) + 1 CALL next_trial ENDIF TERMINATE_VE ENDPROCEDURE PROCEDURE check_queue3 IF (R$(Fac3,QUEUE) > 2) SAVEVALUE TRIAL_STATE.capacity3 , X$(TRIAL_STATE.capacity3) + 1 CALL next_trial ENDIF TERMINATE_VE ENDPROCEDURE ;---------------------------------------------------------- ; Experiment control: increase capacity and retry ;---------------------------------------------------------- PROCEDURE next_trial SAVEVALUE TRIAL_STATE.count , X$(TRIAL_STATE.count) + 1 IF (X$(TRIAL_STATE.count) < 30) RESTART ELSE STOP ENDIF TERMINATE_VE ENDPROCEDURE
- + TRIAL_STATE y RESTART
- + Modelado Cinemático
Los sistemas de movimiento en simulación de eventos discretos (DES) suelen clasificarse por dominio industrial:
- conveyors,
- tráfico vial,
- ferrocarriles,
- AGVs,
- robots,
- etc.
Sin embargo, desde el punto de vista computacional, muchos de estos sistemas comparten estructuras internas similares.
La diferencia real no reside en el objeto físico que se mueve, sino en dónde reside la causalidad del movimiento.
Es decir:
¿Quién posee realmente el régimen cinemático del sistema?
A partir de esta idea, los modelos cinemáticos implementados pueden separarse en tres grandes categorías fundamentales.
1. Cinemática impuesta por el recurso (Conveyor)
En los sistemas Conveyor (cinta transportadora), el movimiento pertenece a la infraestructura.
La cinta:
- impone la velocidad,
- define la dirección,
- y gobierna completamente el régimen de movimiento.
Las entidades transportadas no poseen cinemática propia.
Simplemente heredan el estado dinámico del recurso.La causalidad del sistema es geométrica:
- el espacio disponible,
- los límites,
- y las restricciones físicas,
son quienes determinan cuándo un estado deja de ser válido.
Por ello, el algoritmo no simula movimiento continuo:
simula invalidaciones geométricas futuras.2. Cinemática impuesta por la entidad (Road)
En los sistemas Road (Carretera), la cinemática deja de pertenecer a la infraestructura y pasa a residir en cada entidad.
Cada vehículo posee:
- velocidad,
- aceleración,
- régimen de movimiento,
- y predicciones temporales propias.
La carretera ya no mueve entidades.
Únicamente define:- conectividad,
- topología,
- y restricciones espaciales.
La causalidad deja de ser puramente geométrica y pasa a ser relacional.
Los eventos emergen de la interacción cinemática entre entidades:
- aproximaciones,
- alcance de distancias de seguridad,
- cambios de régimen,
- o invalidaciones de predicciones futuras.
El sistema no integra trayectorias paso a paso.
Calcula cuándo un régimen cinemático dejará de ser válido.
3. Cinemática por impuesta por Autoridad Exterior (Railway)
En los sistemas ferroviarios clásicos, la cinemática local del tren existe, pero queda subordinada a una autoridad externa de ocupación.
La infraestructura no mueve el tren.
La infraestructura autoriza el movimiento.
El sistema se basa en:
- permisos,
- reservas futuras,
- telemetría asíncrona,
- y exclusión mutua distribuida.
La causalidad principal ya no es geométrica ni relacional:
es contractual.El estado válido del sistema depende de la validez temporal de las autorizaciones de circulación.
El motor no simula conducción continua.
Simula cambios de validez sobre permisos de ocupación.
Sistemas híbridos
Muchos sistemas modernos no pertenecen de forma pura a una sola categoría.
Por ejemplo:
- trenes CBTC,
- ETCS Moving Block,
- AGVs,
- robots autónomos,
- tráfico aéreo,
- o flotas AMR,
combinan simultáneamente:
- cinemática local,
- restricciones geométricas,
- e infraestructuras de autorización distribuida.
Estos sistemas híbridos emergen naturalmente como combinaciones de los tres modelos fundamentales anteriores.
Principio general de los modelos DES
En todos los casos se evita resolver el movimiento mediante:
- integración continua,
- polling,
- stepping,
- discretización espacial,
- o recálculo permanente.
La filosofía del motor DES es distinta:
El sistema no procesa movimiento continuo.
Procesa únicamente los eventos que invalidan el estado anterior del sistema.
- + La cinta transportadora
- + El Conveyor: El alma de la logística en DES
Las librerías de manejo de materiales en motores de eventos discretos tienen un elemento nativo fundamental del que parten todos los demás componentes:
La cinta transportadora (Conveyor).
Según el algoritmo utilizado para resolver su movimiento, los motores de simulación se clasifican históricamente en tres grandes enfoques:
- Enfoque de "Sistema de Celdas" (Cell-Based): Reduce el problema a un conjunto de celdas (ocupadas/libres). El estado de la cinta se actualiza transitando el contenido de celda en celda, lo que genera una carga computacional proporcional a la resolución espacial de la cinta.
- Enfoque de "Acumulación" (Basado en Agentes): Cada entidad es consciente de sus antecesores y está atenta a los cambios en su cinemática. Requiere que cada caja recalcule su estado constantemente ante interrupciones, consumiendo recursos de CPU por cada objeto en la cinta.
- Algoritmo de "Evento Próximo" (Scan-Line/Next Event): Se programan cómputos a futuro para cambiar la cinemática. Es más eficiente, pero tradicionalmente rígido ante paradas (Stop) o cambios de velocidad inesperados.
En GPSS-Plus, aprovechamos la potencia declarativa de las Entidades Virtuales (VE) y los bloques de control temporal como
TIMEOUT. Esto nos permite llevar la resolución del algoritmo a una abstracción pura de eventos, logrando una mejora disruptiva sobre el método de "Evento Futuro" tradicional.La arquitectura de Fronteras Mutables logra una mejora disruptiva sobre el método de "Evento Futuro" tradicional al desacoplar por completo la visualización de la lógica.
El Principio Maestro: Reducir la computación al mínimo imprescindible. El motor no procesa "el movimiento"; procesa "el cambio".
- + Definición del Problema
Una cinta transportadora es un recurso que mueve material entre dos puntos y que definimos con estas premisas:
- Gestión de Entrada: Un "embudo" previo acumula las cajas para que ingresen de una en una. Es simplemente una cola FIFO que regula el acceso al punto de carga.
- Dimensiones: La cinta tiene una longitud y una velocidad definidas.
- Ocupación Física: Las cajas entran y salen tomando como referencia su centro, pero ocupan su largo total en todo momento.
- Atasco Dinámico: Una caja puede detenerse en cualquier punto del recorrido (desde el inicio hasta que el último milímetro despeja la cinta). Si hay una parada, las demás cajas seguirán hasta toparse con la detenida.
- No se permite la entrada de una caja si no hay, al menos, la mitad de su largo libre en el punto de carga.
Nuestra labor será crear un recurso que admita la llegada de entidades (cajas de diferente tamaño), pasen al embudo, de él a la cinta y la abandonen con los tiempos, velocidad y atascos que se puedan producir.
El desafío es modelar este comportamiento sin recurrir a celdas ni a recálculos continuos, sino mediante eventos discretos que representen únicamente los cambios relevantes.
- + Arquitectura de la Solución: El Modelo Desacoplado
Para lograr la solución, dividimos el recurso Conveyor en dos capas con responsabilidades radicalmente distintas. Este enfoque simplifica enormemente el problema.
- La capa visual
- La capa lógica
Aunque no lo parezca, toda la solución nos va a venir de olvidarlos completamente de la capa visual: El renderizado.
La capa visual:
Cada caja tiene su longitud, si está moviéndose o no y la última [posición,tiempo] conocida.
Nada más.
El renderizado en cada instante hace el resto.- Si la caja está parada: Se dibuja en la posición guardada.
- Si está moviéndose: Posición_Visual = Posición + Velocidad * (AC1 - Tiempo).
Se trata por tanto de emitir un estado vectorial actual perfecto de todas las cajas y el render hace lo que sea necesario para mostrarlo en ese instante.
Si nos ceñimos a estas necesidades de renderizado, la lógica se simplifica en su filosofía.La capa lógica:
La lógica se despoja de la carga de simular el movimiento continuo. Se reduce exclusivamente a gestionar quién se mueve y quién no, y en qué momento exacto cambia ese estado.
- Inexistencia de integración: El sistema no calcula la posición paso a paso. Calcula el vector de la posición.
- Eventos: En este algoritmo de Evento Próximo, una caja no "avanza hasta encontrar" una restricción. En su lugar, el sistema calcula en qué momento futuro matemáticamente viable donde podría aparecer una restricción (como el choque con la caja anterior o el fin de la cinta).
- El Cambio de Perspectiva: No es la caja la que busca el obstáculo; es la restricción la que "encuentra" a la caja en el tiempo.
Dicho de otra forma:
el tiempo determina cuándo un estado deja de ser válido.
La posición no se busca ni se integra paso a paso.El desafío es modelar este comportamiento sin recurrir a celdas ni a recálculos continuos, sino mediante eventos discretos que representen únicamente los cambios relevantes. Para ello construiremos una topología causal explícita entre las entidades presentes en la cinta, permitiendo resolver todas las decisiones de control sin búsquedas sobre el conjunto de cajas.
- + La capa visual
Aunque GPSS-Plus permite crear animaciones mediante agentes y gráficos nativos, el algoritmo para el Conveyor delega la responsabilidad visual en un recurso externo de tipo MEDIA.
De esta forma, la lógica DES solo se preocupa de emitir estados vectoriales, permitiendo que el motor de simulación corra mientras el renderizado se gestiona de forma independiente.
LOAD_MEDIA https://gpss-plus.com/imports_js/Conveyor_medio.js INSTANCE_MEDIA {name:conveyor, class:Conveyor}De esta forma se expresa mejor la idea de "fire & forget" despreocupándonos completamente de la visual.
Este script inyectado en GPSS-Plus recibe los datos vectoriales de las cajas y se encarga de todo.
Por un lado tendremos este
PROCEDUREen el código que lanzará los datos al MEDIA únicamente cuando hay un cambio relevante en la lógica (un nuevo evento), cumpliendo la filosofía de ahorro de computación. El estado enviado es completamente declarativo: la lógica no informa de movimientos, sino de estados cinemáticos y relaciones causales:PROCEDURE setStatusDisplay assign stateData,[] FOREACH entityNumber,IN_RESOURCE,RR_Conveyor assign.push stateData,{ id: P$entityNumber, position: P$(RR_Position,P$entityNumber), time: P$(RR_Time,P$entityNumber), length: P$(RR_Length,P$entityNumber), height: P$(RR_Height,P$entityNumber), width: P$(RR_Width,P$entityNumber), moving: P$(RR_Moving,P$entityNumber), color: "P$(RR_Color,P$entityNumber)" } ENDFOREACH ASSIGN msg,{operation:"set",state:V$stateData} EXEC_MEDIA {name:conveyor,in:V$msg} ENDPROCEDUREPor otro lado, el script inyectado implementa el método
onRenderFrame, que es invocado automáticamente por el motor de visualización en cada ciclo. Internamente, el métodomoveBoxse encarga de la interpolación cinemática basándose en el tiempo actual (AC1)::moveBox({ AC1, id, position }) { const obj = this.boxes.get(id); if (!obj) return; const { mesh, length, cube } = obj; // ---------------------------------------- // position = CENTRO lengthinal // ---------------------------------------- // distancia del centro sobre la cinta const centerDistance = position * this.scale; // media length real const half = length * this.scale * 0.5; // centro real en coordenadas mundo const cx = this.belt_x1 + this.dir_x * centerDistance; const cy = this.belt_y1 + this.dir_y * centerDistance; // cola const x1 = cx - this.dir_x * half; const y1 = cy - this.dir_y * half; // cabeza const x2 = cx + this.dir_x * half; const y2 = cy + this.dir_y * half; // ---------------------------------------- // actualizar línea // ---------------------------------------- const positions = mesh.geometry.attributes.position.array; // cola positions[0] = x1; positions[1] = y1; positions[2] = 0; // cabeza positions[3] = x2; positions[4] = y2; positions[5] = 0; mesh.geometry.attributes.position.needsUpdate = true; // ---------------------------------------- // actualizar visual derivado // ---------------------------------------- cube.onRenderFrame(AC1,cx,cy,0, true,""); }Conclusión visual: Al ceñirnos a estas necesidades de renderizado, la lógica se simplifica drásticamente. El sistema no busca colisiones visuales; simplemente emite un estado actual perfecto y el render hace lo necesario para mostrarlo en cada instante.
- + La Utillería del Motor: Componentes y Variables
Para implementar el algoritmo de fronteras mutables, el recurso Conveyor utiliza una infraestructura basada en Entidades Virtuales (VE) y almacenes pasivos (RESTROOM). Toda la lógica ocurre mientras las cajas están "dormidas", despertando solo para transitar entre estados.
A. Implementación del Flujo Principal:
RESTROOM {NAME:RR_InputBuffer ,X:348,Y:467,on_rest:RR_InputBuffer ,visible:0} RESTROOM {NAME:RR_Conveyor ,X:581,Y:470,on_rest:RR_Conveyor ,visible:0} GENERATE ... REST RR_InputBuffer ; La caja entra al embudo y se duerme hasta que haya sitio REST RR_Conveyor ; Una vez despertada, entra a la cinta y se vuelve a dormir hasta salir TERMINATE 1Utilizamos dos recursos de tipo
RESTROOMque actúan como estados lógicos que disponen de un hookON_RESTque dispara procedimientos al recibir una entidad.B. Variables del recurso
Físicas del conveyor:
- RR_Length: Longitud total de la cinta.
- RR_Speed: Velocidad de desplazamiento.
- RR_Gap: Espacio que debe dejar RR_InputBuffer entre caja y caja.
- RR_decimals: Decimales del tiempo.
Límites dinámicos (“fronteras mutables”)
- RR_StopLimit: La posición del "tapón" o atasco (inicialmente al final: -RR_Length).
- RR_EntryLimit: El límite de proximidad para nuevas entradas.
Entidades relevantes para la lógica
- RR_EnteringEntity: Caja en RR_InputBuffer que está intentando entrar.
- RR_LeavingEntity: Caja en RR_Conveyor que está intentando salir.
- RR_LastStopedEntity: Última caja en RR_Conveyor que ha sido detenida.
Topología causal
- Para el recurso:
RR_EntityLeader: Caja más próxima a la salida de la cinta.
RR_EntityTail: Caja más próxima a la entrada de la cinta. - Cada caja mantiene referencias directas a sus vecinos inmediatos:
RR_PackFront: Caja situada inmediatamente delante.
RR_PackRear: Caja situada inmediatamente detrás.
C. Los orquestadores temporales TimeOut:
- RR_InputBuffer y RR_EntryTimeout: Evalúan la posible entrada.
- RR_Conveyor y RR_ExitTimeout: Evalúan la posible salida.
- RR_StopTimeout y RR_ResumeTimeout: Evalúan los atascos y continuidad.
D. Versionado de régimen:
Los eventos diferidos pueden quedar obsoletos tras cambios de estado como una parada (Stop) o una reanudación (Resume).
- RR_StopRegimeVersion
- RR_ExitRegimeVersion
- + RR_InputBuffer: El embudo de entrada
Cuando una caja llega al sistema, su única acción posible es ingresar en el Embudo de Entrada (
RR_InputBuffer). En este instante, se dispara el procedimientoON_REST, que evalúa la situación bajo tres escenarios lógicos:Escenarios de Admisión
-
Espera en Cola: Si la caja no es la única en el embudo (
IN > 1), se queda dormida. No hace nada más; la caja que tiene delante será la encargada de gestionar el flujo cuando ella misma avance. -
Entrada Inmediata: Si hay espacio libre suficiente en la cinta (validado contra
RR_EntryLimit), la caja despierta inmediatamente, consume el espacio de forma atómica y transita hacia el siguiente estado (RR_Conveyor). -
Cálculo de Restricción: Si no hay espacio suficiente, se lanza la Entidad Virtual
RR_EntryTimeout. Este evento representa la próxima reevaluación conocida de la restricción geométrica. No busca la entrada, sino el instante exacto en que la restricción podría dejar de ser válida.
Es decir: ¿cuando vuelve a intentar entrar? Dejando ese cálculo para el timeout.
Example:
PROCEDURE RR_InputBuffer if (R$(RR_InputBuffer,IN)>1) terminate_ve endif ; entity may enter conveyor immediately if (X$RR_EntryLimit >= P$(RR_Length,P$ENTITYNUMBER) * 0.5 + X$RR_Gap) ; input ownership consumed atomically savevalue RR_EntryLimit,0 ;timeout RR_Admission,0,P$ENTITYNUMBER WAKE RR_InputBuffer,-1,P$ENTITYNUMBER terminate_ve endif timeout RR_EntryTimeout,0,P$ENTITYNUMBER TERMINATE_VE ENDPROCEDURE -
- + RR_EntryTimeout: Orquestación de Entrada
Este procedimiento, ejecutado por una VE, es el encargado de decidir si una caja puede abandonar el embudo para entrar en la cinta o si debe re-agendar su intento.
Mecánica de Evaluación:
Primero identifica qué caja está intentando entrar, bien mediante el parámetro recibido o, en caso de reactivación del proceso, mediante la primera entidad pendiente en RR_InputBuffer.
A continuación identifica la Caja de cola (la última que entró en RR_Conveyor), ya que su posición física trasera define el límite real de admisión. Gracias a la topología causal mantenida por el recurso, esta referencia se obtiene directamente mediante RR_EntityTail, sin necesidad de recorrer la cinta.A partir de ahí, se evalúan cuatro escenarios:
- Cinta Vacía: Si no hay nadie en la cinta, la entrada es inmediata.
- Espacio Suficiente: Si la distancia entre la entrada y la cola de la última caja es suficiente, la caja entra.
- Bloqueo por Parada: Si no hay espacio y la caja limitante está parada (por un atasco), el tiempo pierde su validez. La VE guarda el ID de la caja que espera en RR_EnteringEntity y finaliza. El proceso se reanudará solo cuando la cinta vuelva a moverse.
- Bloqueo en Movimiento: Si la caja limitante se mueve pero aún no deja hueco, se calcula el instante exacto de la reevaluación basándose en la velocidad.
Obsérvese que RR_EntryTimeout no garantiza la entrada en el instante programado: solo garantiza que ese es el próximo momento en que la geometría podría permitirla. Si la caja limitante se detiene antes, el timeout se invalida.
Example:
PROCEDURE RR_EntryTimeout assign ENTITYNUMBER,P$PARAM_A if (P$ENTITYNUMBER == 0 ) FOREACH entityNumber,IN_RESOURCE,RR_InputBuffer if (P$ENTITYNUMBER == 0 ) assign ENTITYNUMBER, P$entityNumber endif ENDFOREACH endif if (P$ENTITYNUMBER == 0 ) terminate_ve endif ; find entity closest to conveyor init assign tailEntity,X$RR_EntityTail if (P$tailEntity == 0) savevalue RR_EntryLimit,0 WAKE RR_InputBuffer,-1,P$ENTITYNUMBER terminate_ve endif ; calculate current position assign advance, P$(RR_Position,P$tailEntity) + (AC1$ - P$(RR_Time,P$tailEntity)) * X$RR_Speed * P$(RR_Moving,P$tailEntity) savevalue RR_EntryLimit,P$advance - P$(RR_Length,P$tailEntity) *0.5 ; entity fully entered conveyor IF (P$advance - P$(RR_Length,P$tailEntity) *0.5 >= P$(RR_Length,P$ENTITYNUMBER) * 0.5 + X$RR_Gap) savevalue RR_EntryLimit,0 WAKE RR_InputBuffer,-1,P$ENTITYNUMBER terminate_ve ENDIF ; entity stopped moving, timeout loses validity if (P$(RR_Moving,P$tailEntity)==0) ;ASSIGN msg,{operation:"write",value:"RR_EnteringEntity Guardando P$ENTITYNUMBER"} ;EXEC_MEDIA {name:logUI,in:V$msg} savevalue RR_EnteringEntity,P$ENTITYNUMBER TERMINATE_VE endif ; entity has not fully entered yet assign remainingToEnter, ceil( (P$(RR_Length,P$ENTITYNUMBER) * 0.5 + (P$(RR_Length,P$tailEntity) *0.5 + X$RR_Gap) - P$advance) / X$RR_Speed, X$RR_decimals) timeout RR_EntryTimeout, P$remainingToEnter, P$ENTITYNUMBER TERMINATE_VE ENDPROCEDURE - + RR_Conveyor: Gestión de la Cinta
Cuando una caja despierta del embudo e ingresa en la cinta, se dispara el procedimiento
RR_Conveyor. Su misión es inicializar el estado cinemático de la entidad, integrarla en la topología causal del conveyor y determinar si debe asumir algún rol de control.A. Inicialización Cinemática
Al entrar, la caja deja de ser una entidad estática para convertirse en un vector cinemático. Se le asignan tres atributos críticos mediante
ASSIGN:- RR_Time: El instante exacto de entrada (
AC1$). - RR_Position: Posición inicial (0, la entrada).
- RR_Moving: Estado activo (1).
Además, se inicializan sus referencias topológicas que describen las cajas vecinas dentro del conveyor:
- RR_PackFront
- RR_PackRear
Inmediatamente, el sistema fuerza una reevaluación de la admisión (
RR_EntryTimeout) por si hubiera cajas esperando en el RR_InputBuffer.B. Inserción en la Topología
El conveyor mantiene una topología causal explícita mediante una lista doblemente enlazada.
Cada nueva caja se inserta siempre detrás de la actual cola del sistema:
- Si la cinta está vacía, la entidad se convierte simultáneamente en RR_EntityLeader y RR_EntityTail.
- Si ya existen cajas, la nueva entidad se enlaza con la cola actual mediante RR_PackFront y RR_PackRear.
Tras la inserción, RR_EntityTail pasa a apuntar a la nueva caja.
Gracias a esta estructura, el recurso conoce en todo momento qué entidad está más próxima a la salida y cuál está más próxima a la entrada sin necesidad de recorrer la cinta.
C. Recuperación de Propagaciones de Stop
La entrada de una nueva caja puede revelar una situación especial.
Si existe una propagación de parada activa y la entidad situada inmediatamente delante se encuentra detenida, significa que existe un stop pendiente cuya cadena temporal ha desaparecido.
Este escenario puede producirse cuando una nueva caja entra detrás de una entidad ya detenida.
En ese caso, la propia entidad recién llegada reactiva la propagación mediante un nuevo RR_StopTimeout, permitiendo que la lógica continúe exactamente donde se había interrumpido.
D. Ownership de Salida
La salida del conveyor sigue una política de ownership único.
Solamente la entidad más próxima a la salida puede poseer la predicción de abandono de la cinta.
Por ello:
- Si ya existen entidades dentro del conveyor, la nueva caja entra en estado pasivo y no programa ningún evento adicional.
- Si es la única entidad presente, asume el rol de RR_LeavingEntity.
En este último caso calcula el tiempo de recorrido hasta el final de la cinta y programa un RR_ExitTimeout.
Obsérvese que la entidad no agenda su salida como una acción futura garantizada. Lo que agenda es la próxima reevaluación conocida del estado de salida bajo el régimen actual del sistema.
Example:
PROCEDURE RR_Conveyor assign RR_Time,AC1$ assign RR_Time,AC1$,P$ENTITYNUMBER assign RR_Position,0,P$ENTITYNUMBER assign RR_Moving,1,P$ENTITYNUMBER assign RR_PackFront,0,P$ENTITYNUMBER assign RR_PackRear,0,P$ENTITYNUMBER savevalue RR_EntryLimit,0 ; double linked list if (X$RR_EntityTail == 0) savevalue RR_EntityLeader, P$ENTITYNUMBER else assign RR_PackFront, X$RR_EntityTail, P$ENTITYNUMBER assign RR_PackRear, P$ENTITYNUMBER, X$RR_EntityTail endif savevalue RR_EntityTail, P$ENTITYNUMBER if (R$(RR_InputBuffer,IN)>0) timeout RR_EntryTimeout,0 endif call setStatusDisplay ; check active stop limit against new entity assign front,P$(RR_PackFront,P$ENTITYNUMBER) if (X$RR_StopLimit > X$RR_Length * -1 && P$(RR_Moving,P$front)==0 && P$front!=0) ;ASSIGN msg,{operation:"write",value:"RR_Conveyor Orphan stop detected. Front entity P$front is stopped. Re-triggering stop propagation."} ;EXEC_MEDIA {name:logUI,in:V$msg} savevalue RR_StopRegimeVersion, X$RR_StopRegimeVersion + 1 timeout RR_StopTimeout,0,X$RR_StopRegimeVersion endif ; only first entity schedules exit ownership if (R$(RR_Conveyor,IN)>1) terminate_ve endif assign time, ceil( X$RR_Length / X$RR_Speed , X$RR_decimals) savevalue RR_LeavingEntity,P$ENTITYNUMBER savevalue RR_ExitRegimeVersion, X$RR_ExitRegimeVersion + 1 timeout RR_ExitTimeout,P$time,X$RR_ExitRegimeVersion,44444 TERMINATE_VE ENDPROCEDURE - RR_Time: El instante exacto de entrada (
- + RR_ExitTimeout: Orquestación de Salida
El procedimiento RR_ExitTimeout es el encargado de materializar la salida de las cajas. Es fundamental entender que el instante programado no representa una garantía de salida, sino el primer momento físicamente posible en el que la caja podría haber abandonado la cinta si no hubiese sufrido interrupciones.
La filosofía es idéntica a la utilizada por RR_EntryTimeout: el evento no agenda una acción, agenda la próxima reevaluación conocida de una frontera.
Mecánica de Validación y Relevo:
Cuando el evento se dispara se realizan las comprobaciones necesarias para determinar si la VE debe finalizar, reprogramarse o transferir el control de la frontera:-
Validación de Régimen: Lo primero que se comprueba es que el timeout sigue perteneciendo al régimen actual de salida. El valor recibido debe coincidir con RR_ExitRegimeVersion.
- Validación de Movimiento: Si la caja está parada (por un atasco), el timeout pierde su validez. Cuando vuelva a moverse se programará de nuevo.
- Validación de Posición: Se calcula la posición vectorial actual. Si por redondeos o cambios de velocidad la caja aún no ha cruzado el límite (RR_Length), se calcula el tiempo restante y se reprograma un TIMEOUT residual.
- Ejecución de Salida: Si la caja ha llegado al final, se ejecuta un WAKE para sacarla físicamente de RR_Conveyor programando, si existe, la salida de la siguiente caja.
Example:
PROCEDURE RR_ExitTimeout assign TOKEN,P$PARAM_A if ( P$TOKEN != X$RR_ExitRegimeVersion) terminate_ve endif assign ENTITYNUMBER,X$RR_LeavingEntity ;ASSIGN msg,{operation:"write",value:"RR_ExitTimeout : P$ENTITYNUMBER (P$PARAM_B)"} ;EXEC_MEDIA {name:logUI,in:V$msg} ; entity stopped moving, timeout loses validity if (P$(RR_Moving,P$ENTITYNUMBER) == 0) ;ASSIGN msg,{operation:"write",value:"RR_ExitTimeout Is stoped: P$ENTITYNUMBER"} ;EXEC_MEDIA {name:logUI,in:V$msg} TERMINATE_VE endif ; calculate current position assign advance, P$(RR_Position,P$ENTITYNUMBER) + (AC1$ - P$(RR_Time,P$ENTITYNUMBER)) * X$RR_Speed ; entity fully exited conveyor IF (ceil(P$advance,X$RR_decimals) >= X$RR_Length) wake RR_Conveyor,-1,P$ENTITYNUMBER call setStatusDisplay ELSE ; entity has not fully exited yet assign remainingToExit, ceil((X$RR_Length - P$advance) / X$RR_Speed,X$RR_decimals) savevalue RR_ExitRegimeVersion, X$RR_ExitRegimeVersion + 1 timeout RR_ExitTimeout, P$remainingToExit , X$RR_ExitRegimeVersion, 22222 terminate_ve ENDIF ; find entity closest to conveyor exit assign leadingEntity,P$(RR_PackRear,P$ENTITYNUMBER) savevalue RR_LeavingEntity,P$leadingEntity savevalue RR_EntityLeader,P$leadingEntity ;ASSIGN msg,{operation:"write",value:"RR_ExitTimeout Exit: P$ENTITYNUMBER next P$leadingEntity"} ;EXEC_MEDIA {name:logUI,in:V$msg} ; no more entities remaining if (P$leadingEntity == 0) savevalue RR_EntityLeader,0 savevalue RR_EntityTail,0 savevalue RR_LeavingEntity,0 terminate_ve endif assign RR_PackFront,0,P$leadingEntity assign advance, P$(RR_Position,P$leadingEntity)+(AC1$ - P$(RR_Time,P$leadingEntity)) * X$RR_Speed * P$(RR_Moving,P$leadingEntity) assign remaining, X$RR_Length - P$advance assign time, ceil(P$remaining / X$RR_Speed , X$RR_decimals) savevalue RR_ExitRegimeVersion, X$RR_ExitRegimeVersion + 1 timeout RR_ExitTimeout,P$time,X$RR_ExitRegimeVersion, 11111 TERMINATE_VE ENDPROCEDURE -
- + RR_StopTimeout: Gestión de Atascos y Acumulación
El procedimiento
RR_StopTimeoutgestiona la detención de las entidades cuando encuentran una restricción en la cinta (el "tapón"). Por defecto, el límite de parada (RR_StopLimit) está fuera de la cinta (-RR_Length), pero cuando se activa un atasco, el sistema inicia una cadena de eventos.La filosofía es idéntica a la utilizada por RR_EntryTimeout y RR_ExitTimeout: el evento no agenda una parada, agenda la próxima reevaluación conocida de la frontera de acumulación.
Mecánica de Propagación (Backpressure)
Tras verificar que el régimen es el correcto, el orquestador funciona bajo dos escenarios dependiendo de la situación en la que se encuentre la única caja que puede alcanzar la frontera en ese instante (la líder o la situada inmediatamente detrás de la última caja detenida):
Escenario A: Colisión Inmediata Si la caja está invadiendo actualmente el límite de parada (su cuerpo intersecta la coordenada del tapón):
-
Clavado Cinemático: La caja se detiene (
moving: 0) y se registra su posición y tiempo exactos en ese instante (AC1$). -
Mutabilidad del Límite: El
RR_StopLimitse actualiza automáticamente a la cola física de la caja que acaba de chocar. -
Propagación Instantánea: Se rellama al
RR_StopTimeouta tiempo 0 para verificar si la siguiente caja ya está tocando a la que se acaba de detener.
Escenario B: Colisión Futura Si no está tocando el límite actual, se calcula cuando lo haría para reprogramar el timeout.
Efecto Dominó: Este algoritmo permite que la acumulación ocurra de forma natural. Las cajas siguen moviéndose hasta que "rellenan" el hueco vacío, optimizando la ocupación de la cinta sin iteraciones innecesarias.
Example:
PROCEDURE RR_StopTimeout ; stop system disabled if (X$RR_StopLimit == X$RR_Length * -1) terminate_ve endif ; PARAM_A = requested stop limit ;savevalue RR_StopLimit,P$PARAM_A if ( P$TOKEN != X$RR_SotpRegimeVersion) terminate_ve endif ;------------------------------------------------- ; ; Find entity currently invading stop limit ; else ; when invading ; ;------------------------------------------------- assign entityNumber,0 if (X$RR_LastStopedEntity == 0) assign entityNumber,X$RR_EntityLeader else assign entityNumber,P$(RR_PackRear,X$RR_LastStopedEntity) endif if (P$entityNumber==0) terminate_ve endif assign currentHalf, P$(RR_Length,P$entityNumber) * 0.5 assign currentPosition, P$(RR_Position,P$entityNumber) + (AC1$ - P$(RR_Time,P$entityNumber)) * X$RR_Speed assign currentFront, P$currentPosition + P$currentHalf assign currentTail, P$currentPosition - P$currentHalf ; entity intersects stop limit if ( P$currentFront >= (X$RR_Length - X$RR_StopLimit) && P$currentTail <= (X$RR_Length - X$RR_StopLimit) && P$(RR_Moving,P$entityNumber) == 1) ;ASSIGN msg,{operation:"write",value:"RR_StopTimeout Stop in P$entityNumber"} ;EXEC_MEDIA {name:logUI,in:V$msg} ; freeze entity state assign RR_Position, P$currentPosition, P$entityNumber assign RR_Time, AC1$, P$entityNumber assign RR_Moving, 0, P$entityNumber savevalue RR_LastStopedEntity, P$entityNumber ; propagate stop limit backward savevalue RR_StopLimit,(X$RR_Length - P$currentTail) savevalue RR_StopRegimeVersion, X$RR_StopRegimeVersion + 1 timeout RR_StopTimeout, 0, X$RR_StopRegimeVersion call setStatusDisplay terminate_ve else assign target,(X$RR_Length - X$RR_StopLimit) assign remaining, P$target - P$currentFront assign requiredTime, P$remaining / X$RR_Speed ;ASSIGN msg,{operation:"write",value:"RR_StopTimeout future stop de P$entityNumber en P$requiredTime"} ;EXEC_MEDIA {name:logUI,in:V$msg} savevalue RR_StopRegimeVersion, X$RR_StopRegimeVersion + 1 timeout RR_StopTimeout, ceil(P$requiredTime,X$RR_decimals), X$RR_StopRegimeVersion endif TERMINATE_VE ENDPROCEDURE -
- + RR_ResumeTimeout: Reanudación del Flujo
El procedimiento
RR_ResumeTimeoutse encarga de restaurar la cinemática del sistema una vez que la causa del atasco ha desaparecido. Su función es "limpiar" el estado de bloqueo y volver a programar los eventos de las fronteras (Entrada y Salida).Mecánica de Rehidratación
A diferencia del atasco, que es progresivo, la reanudación es atómica para todos los vectores de la cinta:
-
Eliminación del Límite: Se resetea
RR_StopLimita su valor neutro (-RR_Length), eliminando cualquier barrera lógica. -
Sincronización de Vectores: Se recorre la cinta y, para cada caja parada, se establece su nuevo instante de movimiento (
RR_Time = AC1$) y se activa su estado (RR_Moving = 1). Esto permite que el renderizador reinicie la interpolación desde la posición actual. -
Despertar de Orquestadores:
-
Entrada: Si había una caja esperando sitio en el buffer (
RR_EnteringEntity), se relanza suRR_EntryTimeouta tiempo 0. -
Salida: Si había una caja líder esperando para salir (
RR_LeavingEntity), se relanza suRR_ExitTimeouta tiempo 0 para que recalcule su llegada al final.
-
Obsérvese que RR_ResumeTimeout no intenta reconstruir ningún cálculo anterior. Todos los eventos pendientes se consideran potencialmente obsoletos y las fronteras relevantes se recalculan desde el estado actual del sistema.
Example:
PROCEDURE RR_ResumeTimeout ; remove active stop limit savevalue RR_StopLimit,X$RR_Length * -1 assign stoppedEntity,0 ; resume all stopped entities FOREACH entityNumber,IN_RESOURCE,RR_Conveyor if (P$(RR_Moving,P$entityNumber) == 0) assign stoppedEntity, P$entityNumber assign RR_Time, AC1$, P$entityNumber assign RR_Moving, 1, P$entityNumber endif ENDFOREACH savevalue RR_LastStopedEntity, 0 if (P$stoppedEntity == 0) terminate_ve endif call setStatusDisplay ; restore pending entry verification IF (X$RR_EnteringEntity!=0) timeout RR_EntryTimeout, 0, X$RR_EnteringEntity ENDIF ; restore pending exit verification IF (X$RR_LeavingEntity!=0) savevalue RR_ExitRegimeVersion, X$RR_ExitRegimeVersion + 1 timeout RR_ExitTimeout, 0, X$RR_ExitRegimeVersion, 33333 ENDIF savevalue RR_EnteringEntity,0 terminate_ve ENDPROCEDURE -
- + Conclusión del Algoritmo
Este sistema de Gestión de Fronteras Mutables implementado en GPSS-Plus demuestra que es posible modelar sistemas de manejo de materiales de alta complejidad con una carga computacional mínima.
El algoritmo de Fronteras Mutables convierte un conveyor —tradicionalmente uno de los elementos más costosos de simular— en un sistema:
- determinista
- matemáticamente limpio
- reactivo
- O(1) por evento
- sin integración
- sin discretización
- sin recálculos masivos
La clave reside en trasladar la causalidad desde el espacio hacia las fronteras del sistema:
- la frontera de entrada
- la frontera de salida
- la frontera de acumulación
Cada una de ellas mantiene únicamente la información necesaria para predecir su próxima transición posible.
Es, en esencia, un conveyor resuelto por geometría, causalidad y eventos, no por movimiento.
- + El Conveyor: El alma de la logística en DES
- + Road
- + Road: Cinemática Distribuida sobre Entidades
El algoritmo Road representa una ruptura fundamental respecto al modelo Conveyor, aunque ambos compartan la misma filosofía DES de “resolver únicamente los cambios relevantes”.
En Conveyor, la cinemática pertenece al recurso.
En Road, la cinemática pertenece a la entidad.Ese cambio parece pequeño, pero transforma completamente el problema computacional.
El cambio de paradigma
Conveyor: el recurso mueve
En una cinta transportadora existe una única velocidad global en el que el movimiento es homogéneo y las cajas simplemente heredan el régimen cinemático de la cinta.
Las entidades no “deciden” moverse. La infraestructura las desplaza.
Por eso el problema puede resolverse desde la geometría del recurso, porque la causalidad nace en la infraestructura.
Road: la entidad se mueve
En una carretera, ocurre exactamente lo contrario.
Cada vehículo posee su propia velocidad, su propia aceleración, su propio régimen temporal y su propia predicción futura.
La carretera ya no “arrastra”, simplemente define el espacio físico donde los vehículos evolucionan.
La causalidad deja de pertenecer al recurso y pasa a la entidad.
Por tanto el conveyor es un problema geométrico mientras que road es un problema cinemático distribuido. De ser la cinta la que comprueba quien se atasca a ser un vehículo a saber qué otro vehículo le atasca.
- + Definición del Problema
Definición del Problema
Una carretera de un único carril es un recurso que permite el desplazamiento de vehículos entre dos puntos y que definimos con estas premisas:
-
Gestión de Entrada: Un embudo previo acumula los vehículos para que ingresen de uno en uno. Es simplemente una cola FIFO que regula el acceso al punto de incorporación.
-
Dimensiones: La carretera tiene una longitud definida.
-
Cinemática Individual: Cada vehículo posee su propio régimen cinemático definido por: posición, velocidad, aceleración y tiempo de referencia.
-
Ocupación Física: Los vehículos ocupan espacio físico y deben mantener una distancia mínima de seguridad (gap) respecto al vehículo precedente.
-
Propagación Dinámica: Un vehículo cambia su régimen si alcanza al vehículo delantero, y deberá adaptar automáticamente su cinemática para conservar la separación mínima.
Nuestra labor será crear un recurso que admita la llegada de entidades (vehículos con distintos regímenes cinemáticos), pasen del embudo a la carretera, evolucionen dinámicamente interactuando entre sí y finalmente abandonen el sistema.
El algoritmo consiste en modelar este comportamiento sin discretizar el espacio, sin integrar movimiento paso a paso y sin realizar recálculos continuos, utilizando únicamente eventos discretos que representen cambios relevantes en la validez de los regímenes cinemáticos.
-
- + Arquitectura y utillería
La arquitectura del recurso
Roades una evolución directa del algoritmo utilizado en el Conveyor. Ambos comparten la misma filosofía fundamental:- desacoplar completamente la visualización de la lógica,
- representar el movimiento mediante regímenes matemáticos,
- y resolver únicamente los cambios relevantes mediante eventos discretos.
Sin embargo, el problema cinemático de vehículos introduce dos diferencias fundamentales que transforman profundamente la arquitectura interna del sistema.
1. Topología causal explícita
En el Conveyor, y para ser más explicativo, la lógica buscaba qué entidad era relevante para cada cálculo geométrico. En el recurso
Roadya introducimos la lista doblemente enlazada en cada vehículo para saber quién tiene delante y quién tiene detrás.- el vehículo precedente (
RR_CarFront) - el vehículo posterior (
RR_CarRear)
y el sistema conserva además:
- el líder actual (
RR_CarLeader) - y el último vehículo de la carretera (
RR_CarTail)
De este modo, las operaciones fundamentales dejan de requerir búsquedas globales sobre el recurso y pasan a resolverse mediante acceso directo.
2. Los Timeouts dejan de representar posibilidades
En el Conveyor, un
TIMEOUTrepresentaba el próximo instante geométricamente posible donde una restricción podía cambiar. Él mismo se recalculaba si en ese momento, no se habían cumplido las condiciones previstas. Nunca podía ser antes.En
Road, esto no es así.Cada vehículo posee un régimen cinemático propio y por tanto, cualquier predicción futura depende completamente de que dicho régimen permanezca válido. Sin saber si la modificación será a un tiempo posterior, lo que obliga a deshechar esa previsión.
Esto introduce un concepto nuevo en el motor:
Un evento futuro no representa una verdad futura, sino una hipótesis matemática válida bajo un régimen concreto.
Cuando un vehículo alcanza al precedente, cambia automáticamente su régimen dinámico: hereda velocidad, aceleración y nueva referencia temporal.
En ese instante, todas las predicciones anteriores dejan de tener sentido físico.
Para resolver este problema, cada entidad mantiene un identificador de versión cinemática (
RR_RegimeVersion).Cada vez que cambia el régimen la versión se incrementa y todos los eventos futuros programados con versiones antiguas se autodestruyen automáticamente al ejecutarse.
Esto convierte los
TIMEOUTen predicciones autoconsistentes y desechables.El motor no necesita cancelar eventos globales, se invalidan solos.
Como nota, también se podría resolver invalidando directamente el timeout almacenandoo su D$N y lanzándole un signal. Sin embargo, el mecanismo basado en versiones cinemáticas (
RR_RegimeVersion) resulta más desacoplado y robusto, ya que evita gestionar explícitamente el ciclo de vida de las entidades virtuales pendientes y convierte cada predicción en autocontenida y autoinvalidable.
- + Road: Cinemática Distribuida sobre Entidades
- + Train
- + Introducción
Los trenes
El algoritmo de gestión de trenes por tramos (cantones) es un problema clásico de exclusión mutua múltiple que difícilmente se puede observar y modelar con tanta claridad como en GPSS-Plus.
Para abordar la lógica de simulación de este entorno, se hace indispensable comprender algo del vocabulario y la naturaleza del modelo lógico.
Topología rígida (Infraestructura Estática):- Los cantones -> Tramo de vía delimitado entre un punto A y un punto B. Actúa como la unidad mínima de ocupación y el recurso base de exclusión mutua.
- Las conexiones -> Bifurcaciones lógicas que enlazan los cantones, diseñadas bien para converger (unir dos vías en una) o para divergir (separar una vía en dos).
- Cruce -> Intersección física de dos cantones con exclusión mutua atómica. No hay transferencia de trenes entre ellos, pero sus trayectorias son incompatibles simultáneamente.
Topología activa (Elementos de Control Dinámico):
- Las agujas -> Actúan como un conmutador (switch) dinámico entre tres cantones (un origen común y dos alternativas de salida).
- Las señales -> indicaciones situadas en los cantones gestionadas por el CTC
---------------------------------------------
Elementos activos (Entidades):- CTC -> Control de tráfico centralizado. El núcleo del modelo de simulación. Es el sistema supervisor encargado de procesar la telemetría, gobernar el estado de las señales y alinear las agujas en base a las reglas de seguridad y explotación.
- Trenes -> Fluyen por la red de cantones. Se mueven gestionando sus propios atributos locales de velocidad, aceleración y objetivo de velocidad en base a las señales que encuentran.
- + Descomposición del Problema Ferroviario. Planificador vs. Operador
La Separación de Poderes: Scheduler vs. Dispatcher
En una red ferroviaria existen dos problemas distintos:
- decidir por dónde debe circular un tren,
- y gestionar de forma segura los trenes que ya están circulando.
Aunque ambos problemas están relacionados, en la simulación se resuelven por separado.
El Scheduler (planificación de rutas):
El Scheduler es el encargado de calcular el itinerario de cada tren antes de iniciar la marcha.
Su función es responder preguntas como:
¿qué camino debe seguir?
¿qué desvíos debe atravesar?
¿cuál es la mejor ruta disponible?
El resultado es una lista ordenada de cantones que define el recorrido previsto del tren.
En sistemas reales este problema suele resolverse mediante algoritmos de búsqueda de caminos como Dijkstra o A*.Dispatcher: control de circulación:
El Dispatcher (CTC) no calcula rutas.
Parte de la base de que cada tren ya conoce su itinerario y únicamente se ocupa de gestionar la circulación en tiempo real.
Sus responsabilidades son:
reservar cantones,
proteger cruces y conflictos,
mover agujas,
y autorizar o detener trenes según el estado de la red.
Su objetivo principal es garantizar que dos trenes incompatibles no ocupen simultáneamente la misma infraestructura.Alcance del modelo
En esta simulación sólo se implementa el Dispatcher.
El Scheduler queda fuera del modelo porque precisamente requiere una simulación previa capaz de determinar si una nueva circulación puede incorporarse a la red sin generar conflictos.
- + Arquitectura Asíncrona
El Tren frente a Conveyor y Road: La obligación de informar
Es crucial entender la ruptura de paradigma que supone el entorno ferroviario respecto a los algoritmos de Conveyor (Cintas) o Road (Carreteras):
El tren se comportará como sucedía en los anteriores algoritmos de conveyor y road, al estilo fire & forget (disparar y olvidar), ya que con su itinerario, estado y permisos, tienen todo su vector de movimiento.
Sin embargo, la diferencia radical con los otros dos algoritmos es que aquí, el tren, sí debe informar al sistema de su estado. Mientras que un coche o un paquete son arrastrados de forma pasiva por las leyes físicas locales de su carril o su cinta, el tren actúa como un agente activo distribuido. Cada tren es responsable de emitir su telemetría; si el tren no informa de que ha cruzado un límite, el CTC no puede liberar la infraestructura y el modelo se bloquea.
Las comunicaciones:
Una vez acotado el campo de juego al operador (Dispatcher), debemos abordar el diseño del algoritmo. Para entenderlo, es fundamental separar la descripción teórica de las comunicaciones (el lenguaje que hablan entre ellos) de la descripción teórica de la computación (cómo piensa cada entidad por separado).
El sistema se basa en un modelo Maestro-Esclavo compuesto por dos entes pensantes diferenciados que trabajan de forma colaborativa y asíncrona:
┌────────────────────────────────────────────────────────┐ │ CTC (Maestro - Agente) │ │ Permanece estático. Gestiona la matriz global. │ └───────────────────────────▲────┬───────────────────────┘ │ │ Telemetría ▲ ▼ │ │ Permisos ▲ ▼ │ │ ┌───────────────────────────┴────▼───────────────────────┐ │ TRENES (Esclavos - Entidades Físicas) │ │ Fluyen por el mapa. Mutan su cinemática y posición. │ └────────────────────────────────────────────────────────┘1. El CTC (El Maestro Estático)
Está representado por una transacción de control siempre activa "mentalmente" pero sin representación física en las vías. Su única misión es evaluar el estado de la red cuando ocurre un evento. Su ciclo de vida es un bucle infinito de escucha:
while (1==1) advance 1000 endwhile2. Los Trenes (Los Esclavos Físicos)
Son entidades con representación en el simulador. Viven encerrados en su propio bucle infinito, pero, a diferencia del CTC, ellos sí ejecutan trabajo físico y cinemático. Su motor interno es una máquina de estados que se actualiza continuamente:
while (1==1) assign state, P$stateNext ... ... endwhile
3. Las Comunicaciones: El Protocolo de Intercambio
Con las dos mentes funcionando en paralelo, la lógica general de la simulación se reduce a un ping-pong constante de mensajes distribuidos en cuatro pasos estrictos:
-
Tren ──> CTC (Telemetría): El tren alcanza un punto de control y emite un paquete con su situación actual e intenciones futuras.
-
CTC ──> Tren (Despacho): El CTC recibe el mensaje, consulta la base de datos global de cantones y despacha los permisos necesarios si están disponibles.
-
Tren ──> Actuación: El tren recibe la orden, altera su máquina de estados local y modifica su velocidad y su posición en consecuencia.
-
Tren ──> CTC: Tras completar su actuación física, el tren vuelve a emitir telemetría, reiniciando el ciclo.
La Máquina de Estados del Tren
Mientras que el CTC no tiene "estados" propios (el CTC es un administrador que custodia y gestiona la matriz global de permisos de todos los cantones), el tren reacciona estrictamente a tres órdenes cinemáticas (estados):
-
Estado 0 (DETENERSE): Denegación de permiso. El tren calcula su rampa de frenado para detenerse por completo antes de invadir el siguiente cantón.
-
Estado 1 (INICIAR LA MARCHA): Permiso concedido desde parado. El tren aplica su tasa de aceleración para vencer la inercia y salir del cantón actual.
-
Estado 2 (CONTINUAR LA MARCHA): Permiso concedido en velocidad. El tren mantiene su régimen de velocidad crucero y avanza de forma fluida hacia el siguiente cantón.
Mientras que el CTC no tiene un estado, sino que conserva y gestiona los permisos de todos los cantones.
-
- + La utillería
Si bien en conveyor y road lo importante era el estado de cada elemento que define su vector y el control de ese vector, en train el elemento principal es el estado de los cantones. Si están libres o reservados por un tren en particular.
Los tres tipos de Cantón en la Base de Datos (JSON):Por simplificar, en ese mismo estado de un cantón, también introducimos qué otros cantones deben ser reservados a la vez que ese mismo y si tiene la caractarística de contener una aguja para tener 3 coordenadas con un origen, un destino y un destino alternativo:
; cantón normal: "37": { "data": { "x1": 617, "y1": 59, "x2": 573, "y2": 100, "next": 38, "prev": 36 } }, ; cantón que al ser reservado implica reservar otros dos para preservar los flancos: "38": { "data": { "x1": 573, "y1": 100, "x2": 532, "y2": 149, "next": 39, "prev": 37 , "bloq": [17, 16]} }, ; cantón con bifurcación: "40": { "data": { "x1": 468, "y1": 251, "x2": 427, "y2": 300, "next": 41, "prev": 39 , "alt":300, "x3": 468, "y3": 251, "position":0} },al que el CTC le añade un atributo más: "occupiedBy", para indicar si está libre (0) o el tren que lo tiene ocupado o reservado.
- + La Ventana Asíncrona y la Reserva N+2
Con la estructura de datos simplificada, el algoritmo de control se reduce a resolver tres preguntas críticas: ¿Cuándo habla el tren con el CTC? ¿Cuánto espacio necesita reservar para no chocar? y ¿Cuanto tarda el CTC en preparar las agujas?
1. El Intervalo Inexacto de la Comunicación (La Ventana de Telemetría)
La comunicación entre el tren y el CTC no ocurre en un momento exacto. Un tren llega al final de un cantón a una velocidad determinada y, debido a su masa, no puede frenar de manera brusca. Necesita espacio. En nuestro algoritmo, por simplificación, el tren requiere 1/2 de la longitud de un cantón completo para detenerse.
El proceso se desencadena en el instante en que el tren llega al final de su cantón actual e invade el siguiente. Sin embargo, la respuesta del CTC no es instantánea ni síncrona; llegará en algún momento posterior, a lo largo del tránsito por el nuevo cantón, y siempre antes de alcanzar el siguiente fin de cantón. Si la respuesta no llegase a tiempo, simplemente el tren no tendría permisos para continuar y se detendría.
Para emular de forma realista que este proceso ocurre en un punto intermedio cualquiera, posponemos el envío mediante un timeout y lo transmitimos al CTC a través de un signal asíncrono:
timeout sendTelemetry,2,D$N ... ... procedure sendTelemetry assign train,P$PARAM_A assign status,{ train:P$train, state:P$(state,P$train), route:P$(route,P$train), occupiedBlock:P$(block,P$train), releasedBlock:P$(releasedBlock,P$train) } signal processTelemetry,X$ctc,V$status terminate_ve endprocedure2. La Regla de Reserva N+2 y la Devolución de Permisos
El CTC, por su parte, debe garantizar que el tren disponga de ese cantón de seguridad para frenar si la vía estuviera cortada más adelante. Por tanto, el algoritmo computa con dos cantones de vista al frente (N+2): evalúa el cantón subsiguiente (
nextNext), reserva los cantones extra necesarios según las restricciones de la base de datos (como los flancos de protección"bloq") y libera los cantones que el tren ya ha abandonado.Tras procesar la solicitud y asignar los cantones posibles a los requerimientos del tren, el CTC genera un extracto de los permisos de ese tren y se los envía de nuevo por un
signalasíncrono:call getTrainPermissions,P$train signal trainReceiveOrders,P$train,V$getTrainPermissions ... ... procedure getTrainPermissions assign permissions,[] FOREACH nblock, IN_OBJECT, V$(blocks) assign occupiedBy,X$(blocks.P$nblock.data.occupiedBy) if (P$occupiedBy == P$PARAM_A) assign.push permissions, P$nblock endif ENDFOREACH return V$permissions endprocedure3. El Enclavamiento Automatizado de las Agujas
En este flujo asíncrono, el movimiento de la infraestructura está ligado directamente a la autorización del espacio. En el mismo instante en el que se otorga un permiso de ocupación, el CTC iniciará el cambio las agujas necesarias para el tren al que le acaba de conceder la vía.
La aguja se mueve como consecuencia lógica de la firma de la reserva en el CTC. Una vez que el tren recibe su array de cantones autorizados a través de
trainRecibeOrdenes, la aguja ya estará alineada en la posición correcta (position: 0o1), garantizando que el tren realice su actualización física (trainUpdate) y visual sin saltos ni descuadres geométricos.Ese es el principal motivo por el que la comunicación es asíncrona. No se sabe cuanto tiempo tardará el CTC en mover las agujas desde que recibe la solicitud.
- + Filosofía DES del modelo ferroviario
Filosofía DES del modelo ferroviario
El modelo ferroviario de GPSS-Plus no simula el movimiento continuo de los trenes.
Simula únicamente la validez temporal de las autorizaciones de circulación.
Esta diferencia es fundamental.
En un motor imperativo clásico, el sistema normalmente:
-
consulta posiciones continuamente,
-
detecta colisiones,
-
evalúa distancias,
-
y recalcula estados en cada ciclo.
En este modelo no existe ningún escaneo global de la red.
El CTC no "vigila" trenes.
Los trenes tampoco preguntan constantemente si pueden avanzar.
Toda la lógica se basa exclusivamente en eventos discretos que invalidan el estado anterior del sistema.
El estado sólo cambia cuando ocurre un evento
Mientras nada cambie:
-
ningún cálculo es necesario,
-
ningún cantón se reevalúa,
-
y ningún tren consume CPU adicional.
El sistema permanece estable hasta que ocurre uno de estos eventos:
-
un tren invade un nuevo cantón,
-
una reserva deja de ser válida,
-
una aguja debe cambiar,
-
o una telemetría modifica el estado global de permisos.
Sólo entonces el CTC vuelve a computar.
Telemetría como mecanismo de causalidad
La telemetría no es un mecanismo visual ni estadístico.
Es el disparador causal del algoritmo.
El CTC únicamente conoce el estado de la red a través de los eventos emitidos por los propios trenes.
Si un tren no informa:
-
el CTC no libera cantones,
-
las reservas permanecen activas,
-
y el sistema conserva el último estado válido conocido.
Por tanto, la consistencia de la red emerge del intercambio de eventos y no de una supervisión continua.
Reserva predictiva en lugar de control continuo
El sistema tampoco controla físicamente la conducción del tren.
El CTC únicamente concede o deniega ventanas futuras de ocupación.
Cada tren:
-
recibe permisos,
-
actualiza su máquina de estados,
-
y resuelve localmente su comportamiento cinemático.
El algoritmo no calcula trayectorias paso a paso.
Calcula cuándo una autorización deja de ser válida.
Principio fundamental
El motor no simula conducción.
Simula cambios de validez sobre permisos de ocupación.
-
- + Introducción
- + Interfaz de Usuario-Modelo UI
- + Agradecimientos
Agradecimientos
Este proyecto no habría sido posible sin un sinfin de colaboradores. Mi más sincero agradecimiento a:
- Geoffrey Gordon (GPSS Clásico): El genio detrás del General Purpose Simulation System. Gracias por sentar las bases de la simulación de eventos discretos y por enseñarnos que el mundo se puede entender a través de bloques, transacciones y lógica pura. Esta evolución se ha realizado con todo respeto y admiración.
- Math.js: El motor dentro del motor. Sin su capacidad de cálculo, no habría ni solver, ni traductor matemático, ni derivadas, ni SNA... Impresiona ver tanta muestra gratuita de ingenio. Es el alma matemática de todo este proyecto.
- Bootstrap, Monaco Editor, three.js: Por formar la interfaz; aportando la estructura visual y una experiencia intuitiva y legible.
- A las IA: Por actuar como esos "becarios" de capacidad inagotable y precisión asombrosa. Han sido el copiloto perfecto en el todo el desarrollo, demostrando que la inteligencia artificial es un multiplicador de fuerzas impresionante.
- Los que nos aguantan: Por estar siempre a nuestro lado cuando nos encerremos delante de la pantalla o les contamos teorías que no entienden como si les interesase.
Antonio Sánchez y resto del equipo. Enero de 2026
Asumimos que estás de acuerdo con esto, pero puedes rechazarlas si quieres o informarte de ellas en Política de cookies.